In January 2023, the Project Horus High-Altitude Ballooning group performed two launches, Horus 58 on the 15th of January, and the Southern Hemisphere Space Studies Program 2023 launch, on the 29th of January.
Southern Hemisphere Space Studies Program Background
 The Southern Hemisphere Space Studies Program is a multi-week course conducted by the University of South Australia, in partnership with the International Space University. This is an intensive program designed to provide a multidisciplinary understanding of the key activities and areas of knowledge required in today’s space professions. It covers a wide range of topics including space systems engineering, space science, space law, and much more!
The Southern Hemisphere Space Studies Program is a multi-week course conducted by the University of South Australia, in partnership with the International Space University. This is an intensive program designed to provide a multidisciplinary understanding of the key activities and areas of knowledge required in today’s space professions. It covers a wide range of topics including space systems engineering, space science, space law, and much more!
The Amateur Radio Experimenters Group has been involved in this program for many years, assisting with High-Altitude Balloon workshops. Over the course of a week, participants learn about the regulatory, technical, and practical aspects of a high-altitude balloon launch; develop a payload to fly on the launch; and finally perform the launch and analyse the collected data.

The SHSSP 2023 High-Altitude Balloon Cohort
This year’s participants were split into teams focusing on different aspects of the flight:
- Launch Planning & Execution, lead by Mark VK5QI
- Payloads, lead by Matt VK5ZM
- Ground Stations & Telemetry, lead by Bill VK5DSP
- Imagery and Data Analysis, lead by David Bruce
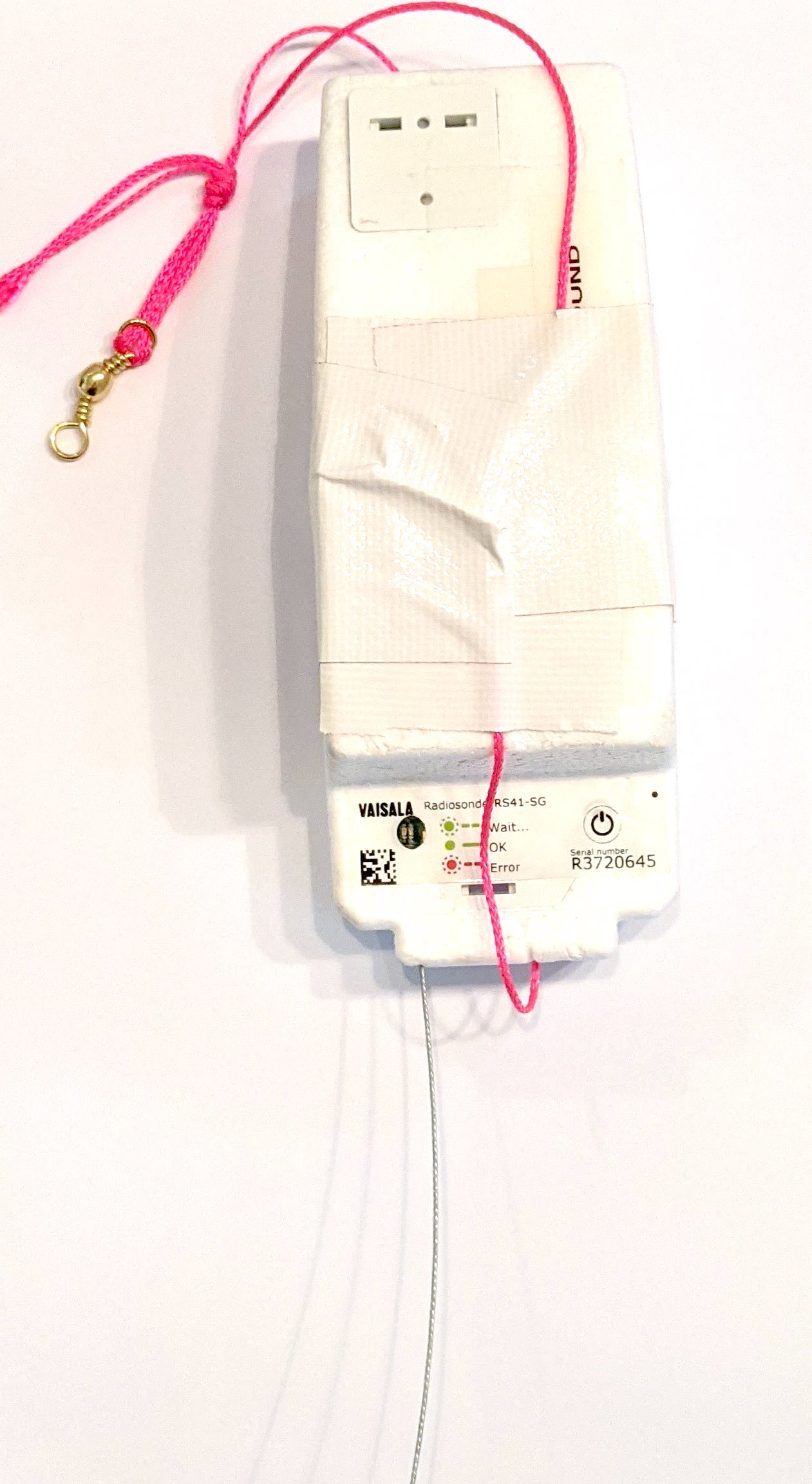
This years launch included multiple imaging payloads (horizon and nadir-facing), and a radiation sensor payload, which the participants calibrated against a Cobalt-60 source and a known-good personal dosimeter. The dosimeter was also flown as a backup.
Launch Planning & Delay
Planning for the flight started on Monday the 23rd, where it was realised that a weather front was going to be moving through the state over the launch weekend. This meant that there was significant uncertainty in the weather models, and so both the flight path predictions, and the predictions for launch day weather was changing drastically with every model update.
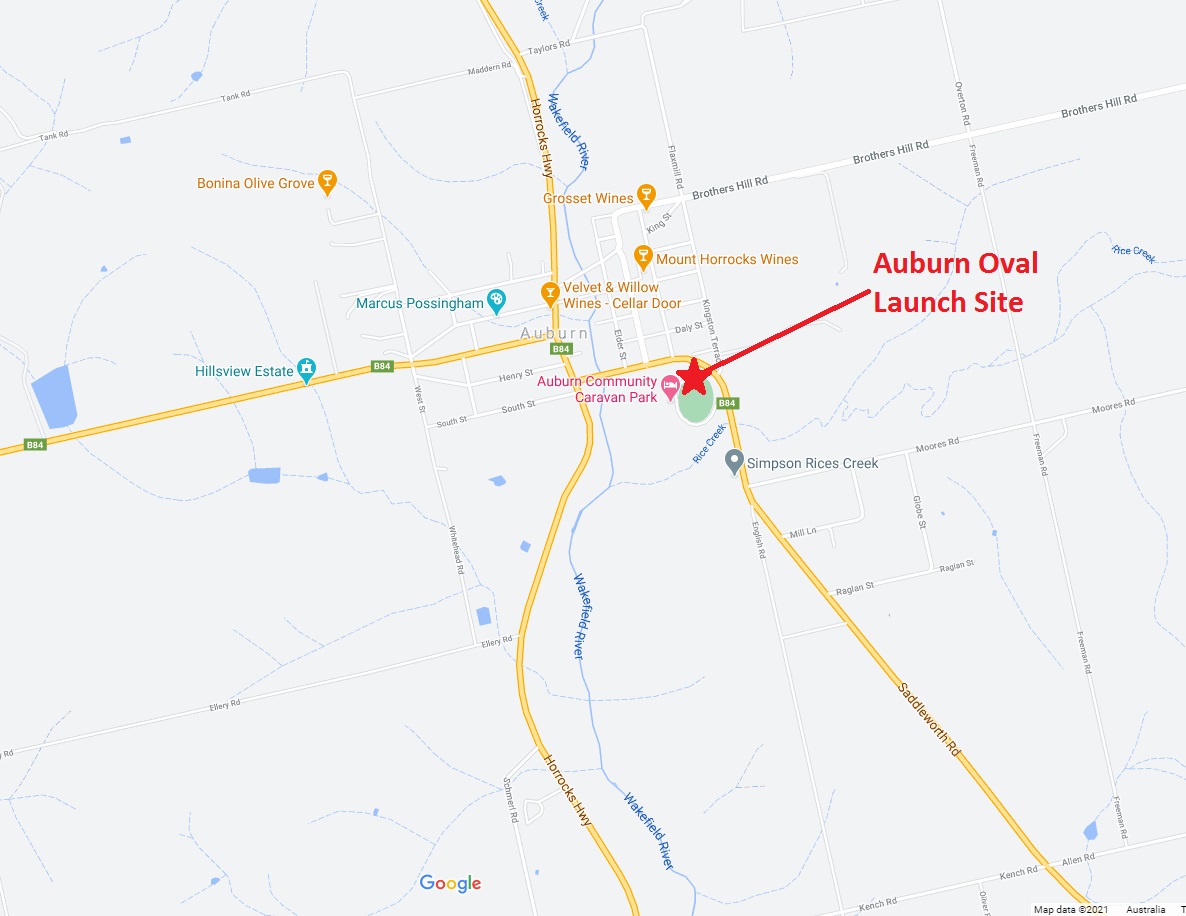
On Wednesday the call was made based on the current weather models to move the launch from Saturday to Sunday (with a fairly significant effort in rearranging all the launch-day logistics on the part of UniSA!). At this point the cloud forecasts for Sunday looked significantly better (no cloud!), and the predicted flight path resulted in a landing not too far from Auburn.
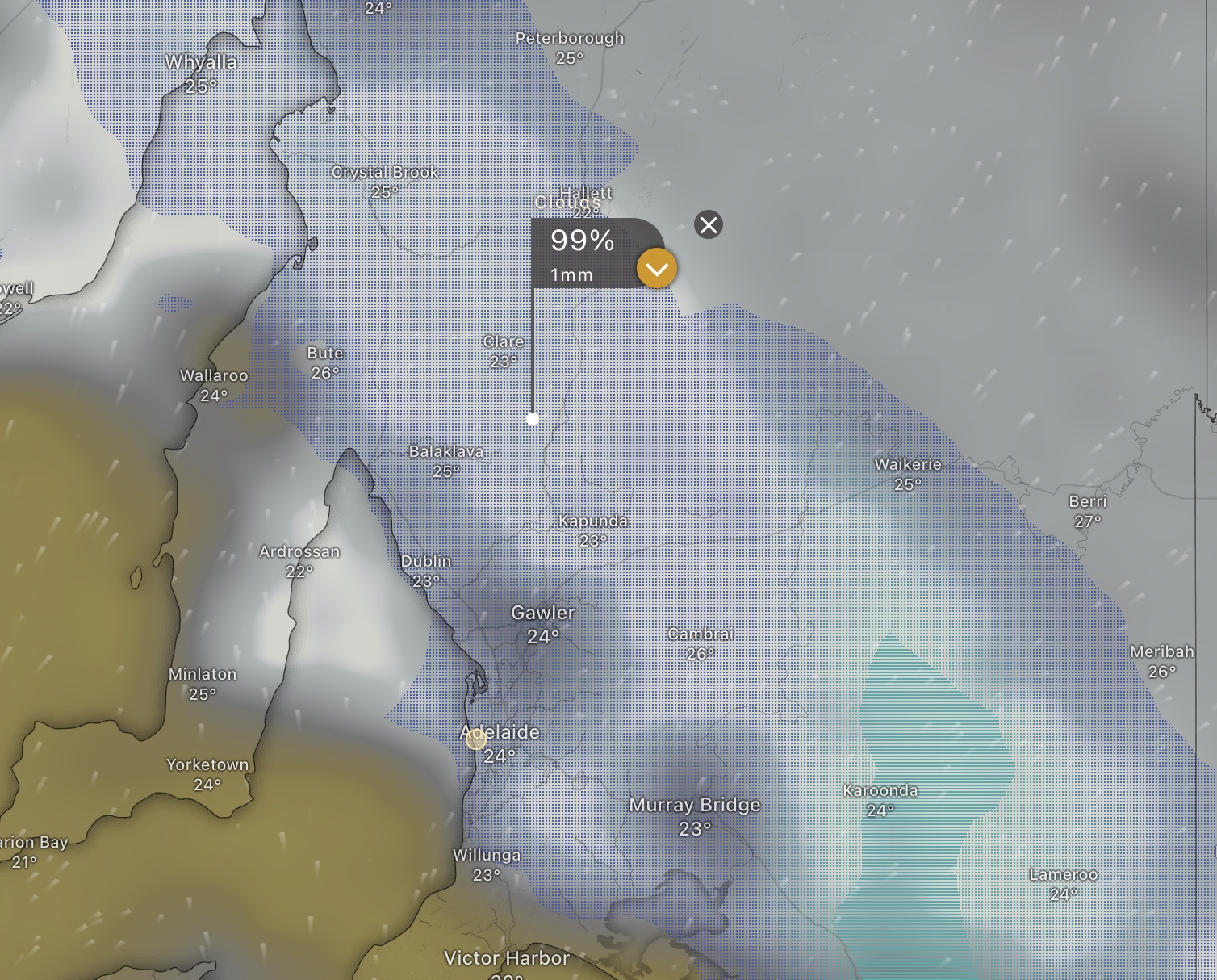
Unfortunately, as we got closer to the launch day, the weather forecasts got worse and worse. The weather front which was originally predicted to pass over the launch area on Saturday was now ‘running late’, and would still give us grief on the Sunday. While the wind and temperature forecasts looked good, we now had a 100% chance of blanket cloud cover (rending the Nadir-facing imagery useless), and a reasonable chance of showers!
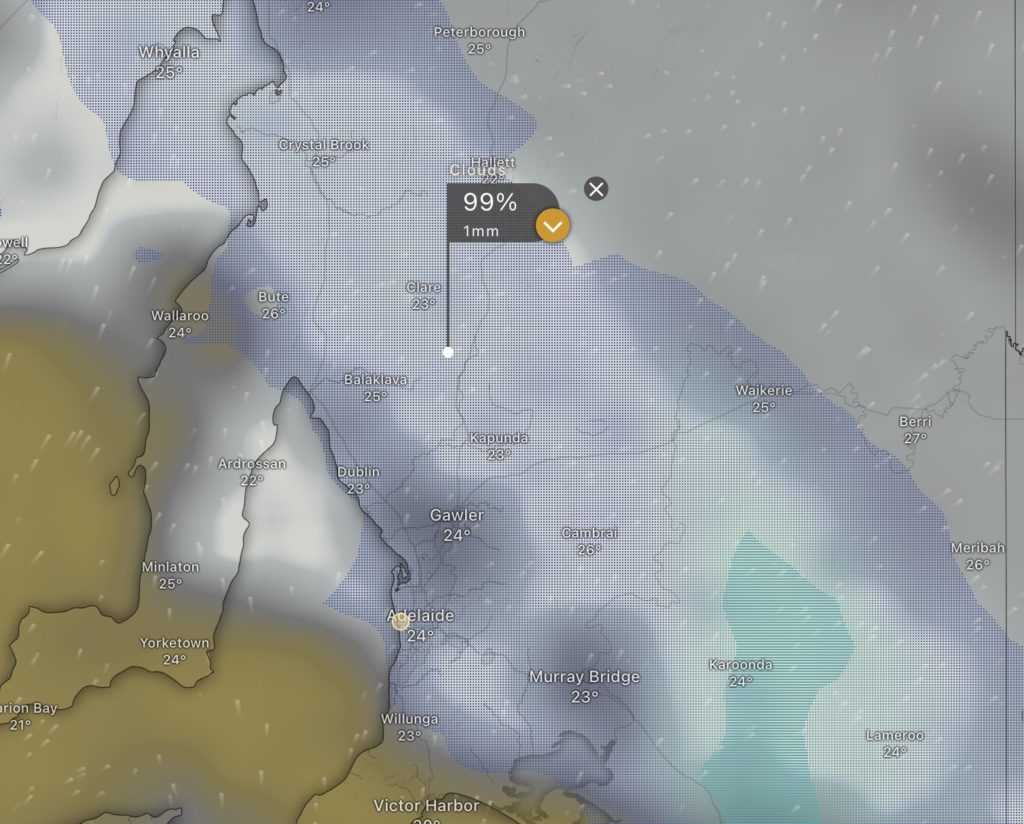
Cloud forecast predictions for the Sunday (as forecast Saturday morning), from Windy.com
Additionally, the predicted flight path was now trending further the south-east, with the landing now predicted somewhere between Truro and Blanchetown.
Unfortunately delaying the launch to the following weekend was not practical due to other schedule conflicts, so planning progressed for a Sunday morning launch, hoping that the forecast rain would be gone by the time of the launch.
Launch, Chase & Recovery
The morning of the launch the SHSSP participants and the AREG launch crew assembled at the launch site to overcast skies. Thankfully most of the heavier showers had fallen overnight, but a light drizzle persisted right throughout the launch.

SHSSP participants preparing the payloads
Preparations for the launch quickly got underway, with each SHSSP team working on their respective areas. Payloads were prepared, balloons filled, ground-stations setup, and by 11:30 AM everything was ready for launch.

SHSSP participants filling the balloon
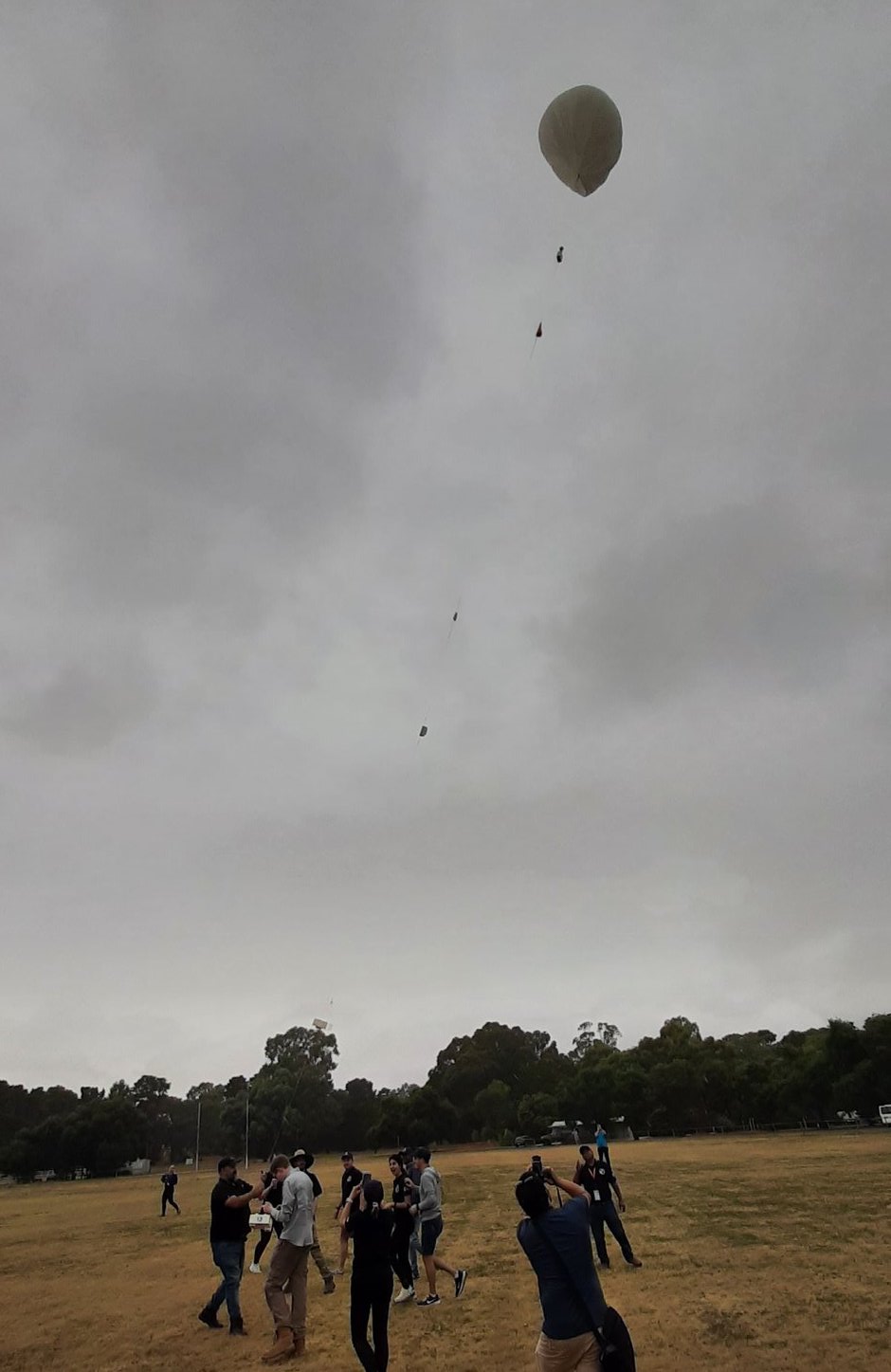
Just as the count-down began, the wind picked up, resulting in one of the payloads having a bit of a bounce on the ground before the entire payload train rose slowly into the air.
Launch!
After the balloon was released, the SHSSP teams headed back to the ground-station to watch the live telemetry and images, while the chase teams headed off towards the landing site (via the Truro bakery of course!). Unfortunately the SSDV website crashed about 10 minutes before the launch, so those watching from home were unable to see the live imagery.

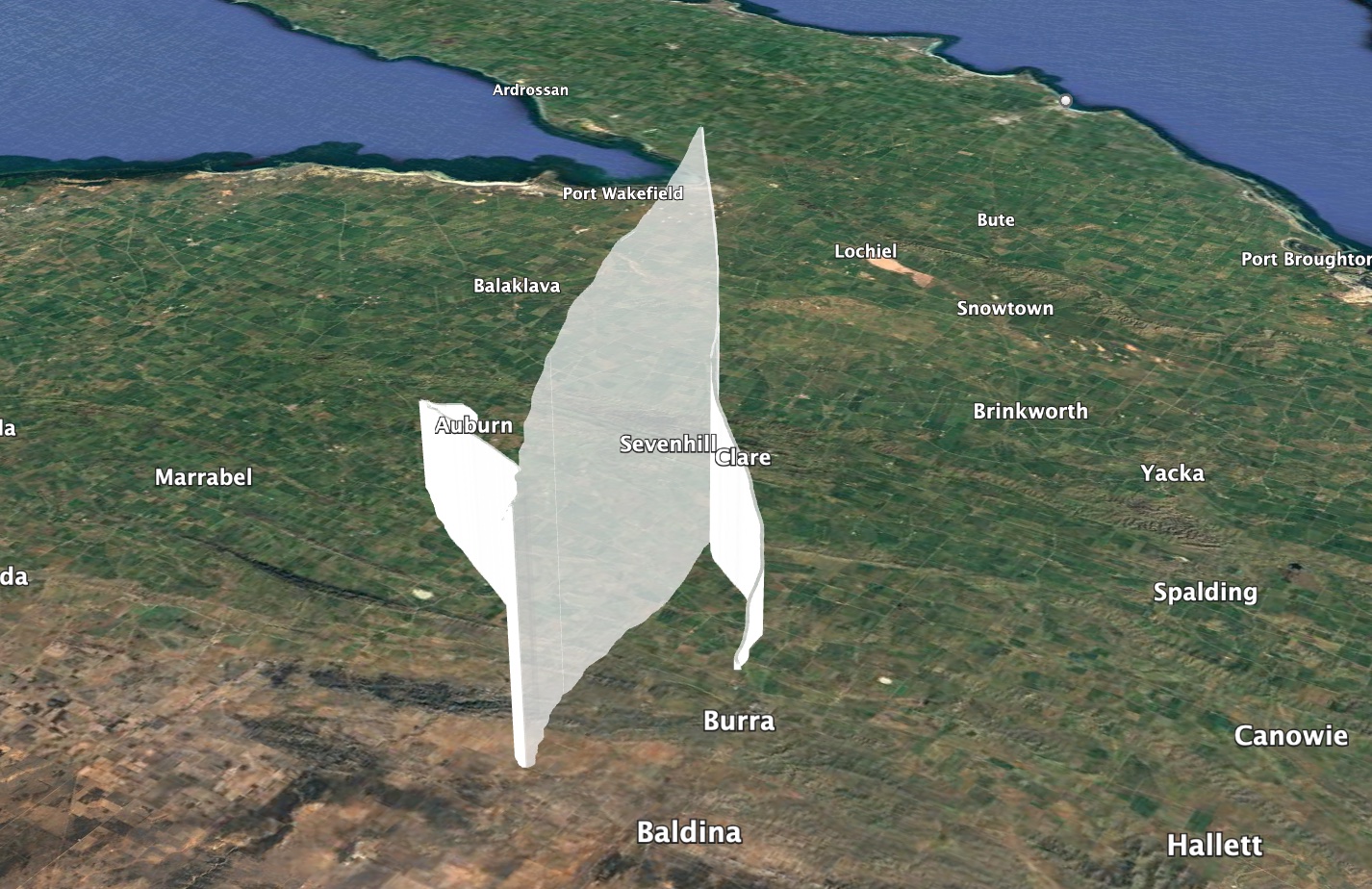
SHSSP 2023 Flight Path
The balloon rose to a maximum altitude of 35431m (a good performance for the balloon in use) before bursting and descending. The descent was a fair bit faster than expected, later discovered to be due to about 700g of the 1600g balloon getting tangled around the parachute! For a while it looked like the payloads may end up landing a long way from a road, but the high descent rate resulted in them landing in a fairly accessible area, only a short walk from a nearby track.
The recovery teams (lead by Mark VK5QI, Liam VK5LJG, Steve VK5ST, with Don VK5KT joining us near the landing) were able to watch the payloads descend the last few hundred metres, before landing… in a tree.
This slideshow requires JavaScript.
Getting the payloads out of the tree took a bit of effort with a long pole and a knife, but eventually the payloads were all cut loose. Thanks again to all those that came out on the chase!
Data Analysis
From the flight came a range of data products, including:
- ‘Live’ radiation measurements from the Geiger Counter payload
- Cumulative radiation dose measurements from the personal dosimeter (3 uSv dose over the flight)
- Lots of imagery!
Some examples of imagery from the Horizon-facing camera are shown in the following gallery:
This slideshow requires JavaScript.
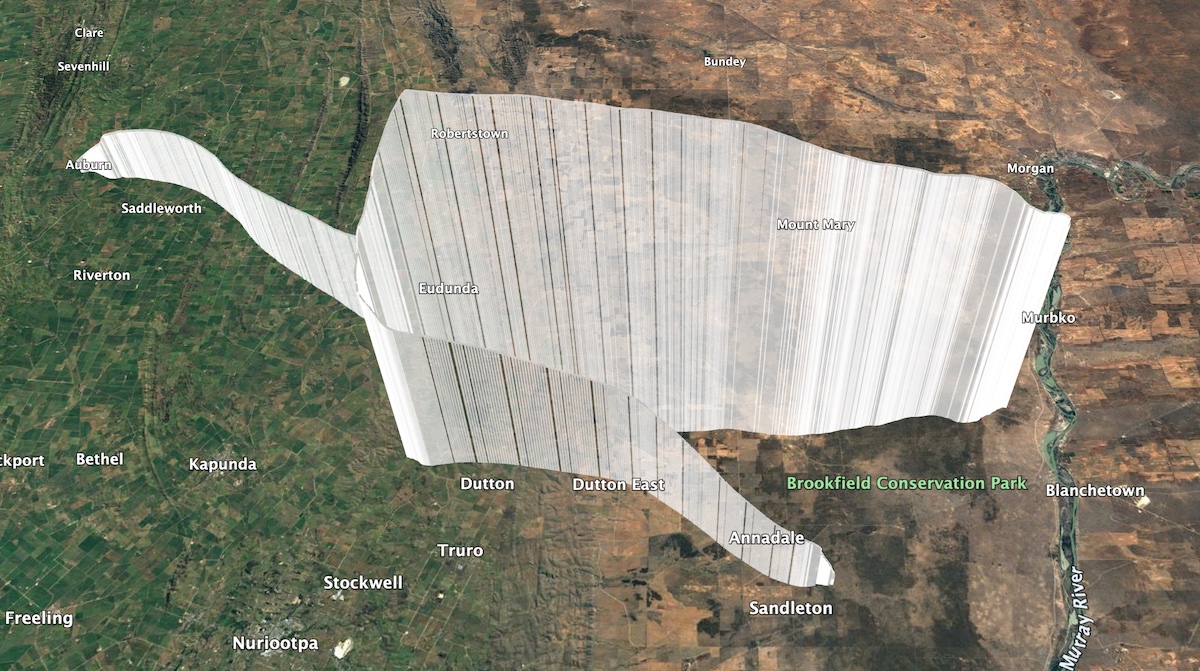
Unfortunately the Nadir-facing imagery showed nothing but cloud, so the participants made use of the imagery captured on the Horus 58 launch for their analysis. They used the open source QGIS software to geo-reference some of the captured images, and then perform pan-sharpening of imagery of the same area captured by the Sentinel-2A earth observation satellite, essentially increasing the spatial resolution of the Sentinel imagery. The following images show an example the original low resolution (10 m), and pan-sharpened high resolution (1.5 m) imagery.
This slideshow requires JavaScript.
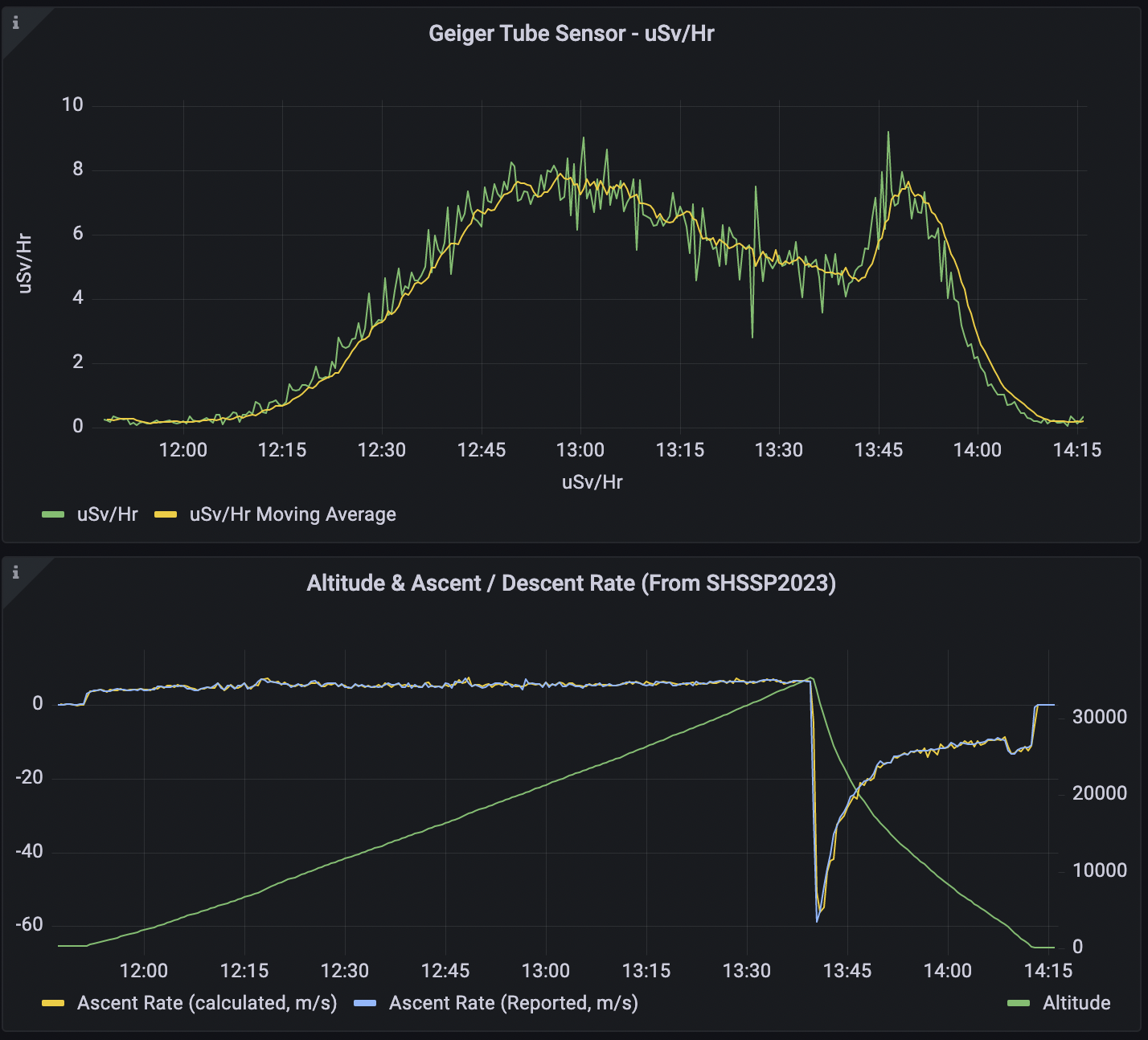
The radiation sensor data showed similar levels to the previous Horus 58 launch, with the Pfotzer-Regener maximum observed around 20km altitude.
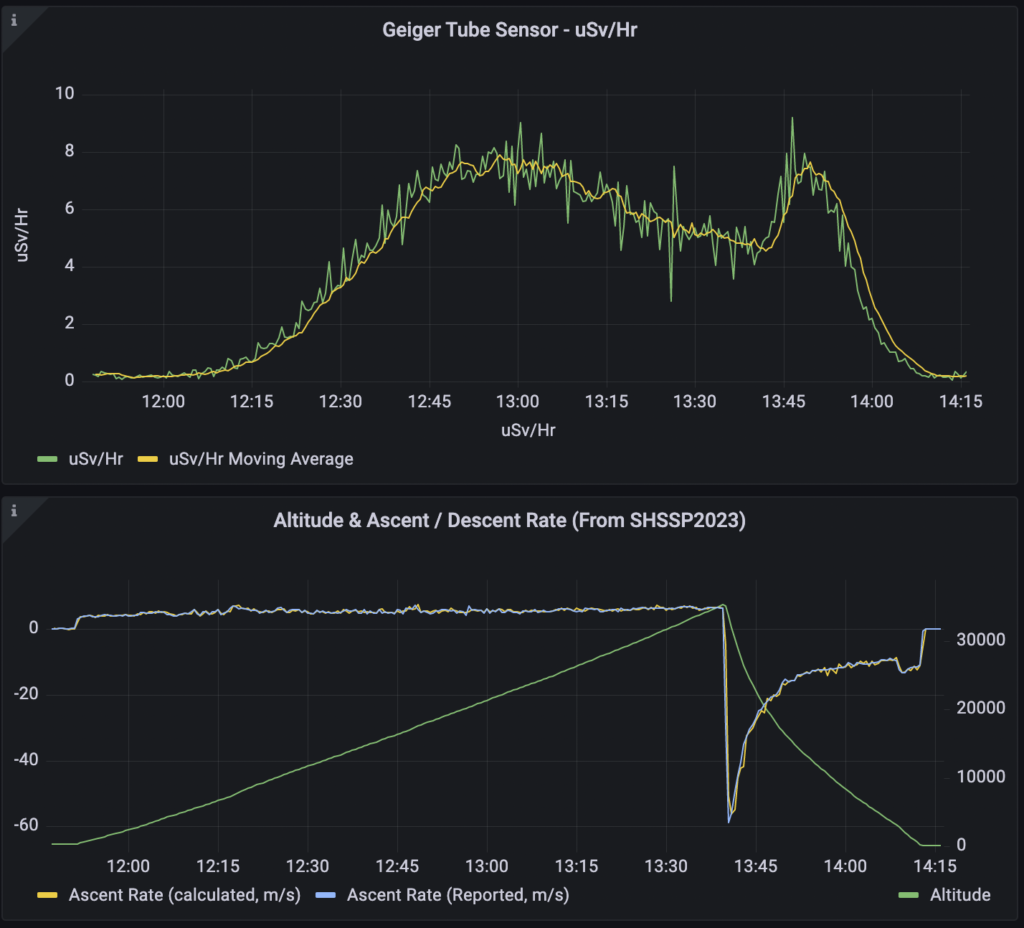
Radiation levels (top) observed throughout the SHSSP 2023 flight.
The telemetry data for the flight was also shown live on a data dashboard, which can be viewed at this link.
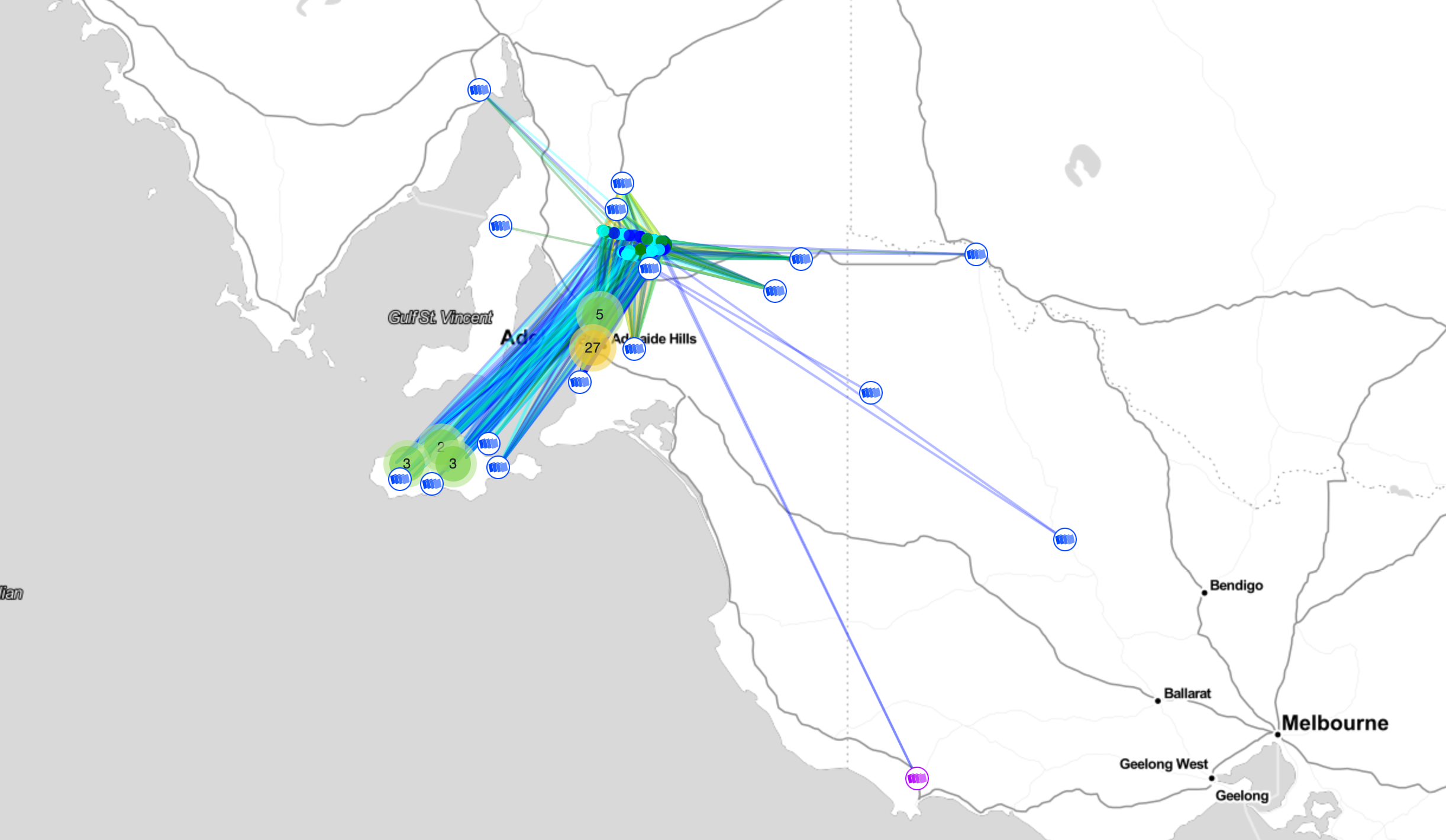
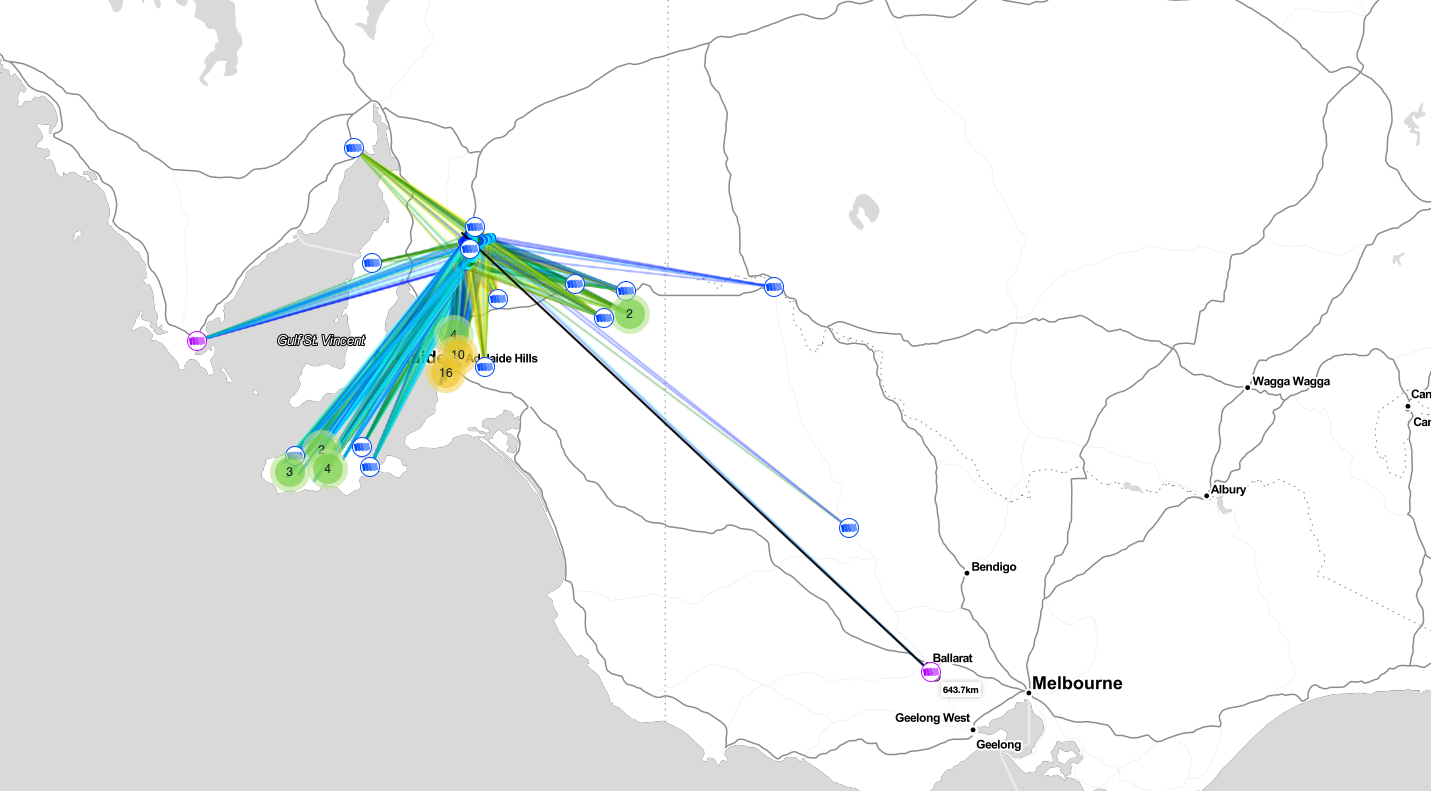
Receiver Statistics – Horus Binary Telemetry
As with the Horus 58 flight, we saw a great response from the local amateur radio community in helping to receive telemetry. This flight saw 37 unique callsigns receiving telemetry, including three stations run by the SHSSP participants. This flight also got high enough for a few stations in Melbourne to join in on the fun!
SHSSP 2023 - SHSSP2023 Receiver Statistics
| Callsign | Received Packets | Percentage of Flight Received | First-Received Altitude (m) | Last-Received Altitude (m) |
| BARC-RRR | 427 | 20.9% | 10238 | 997 |
| SHSSP-RJ | 1195 | 58.5% | 312 | 29111 |
| SHSSP-VM | 220 | 10.8% | 12078 | 29404 |
| VK3BKQ | 169 | 8.3% | 33505 | 31121 |
| VK3BQ | 185 | 9.1% | 33531 | 33632 |
| VK3JUG-5 | 1649 | 80.8% | 5114 | 4619 |
| VK3TNU pi3-2 | 822 | 40.3% | 11935 | 29111 |
| VK5AKH | 1654 | 81.0% | 312 | 29494 |
| VK5AKK | 1911 | 93.6% | 416 | 2152 |
| VK5ALG | 1805 | 88.4% | 609 | 4504 |
| VK5ALG-9 | 2011 | 98.5% | 312 | 78 |
| VK5AMH | 1808 | 88.6% | 1969 | 1092 |
| VK5APR | 1587 | 77.8% | 777 | 2152 |
| VK5ARG | 1958 | 95.9% | 310 | 952 |
| VK5CLD | 1880 | 92.1% | 400 | 1043 |
| VK5CV | 1601 | 78.4% | 1916 | 4581 |
| VK5DJ | 1211 | 59.3% | 12436 | 8653 |
| VK5DMC | 1273 | 62.4% | 6967 | 4504 |
| VK5FD | 1919 | 94.0% | 473 | 2644 |
| VK5GY | 1906 | 93.4% | 702 | 4776 |
| VK5IS | 1942 | 95.1% | 505 | 2152 |
| VK5KX-i5 | 2001 | 98.0% | 311 | 78 |
| VK5LO-5 | 913 | 44.7% | 609 | 29290 |
| VK5MAS | 947 | 46.4% | 13824 | 29111 |
| VK5NEX | 1874 | 91.8% | 846 | 3025 |
| VK5NTM | 1950 | 95.5% | 846 | 251 |
| VK5OI | 10 | 0.5% | 4274 | 4214 |
| VK5PJ | 1829 | 89.6% | 1375 | 78 |
| VK5QI-9 | 1887 | 92.5% | 312 | 79 |
| VK5RK | 1924 | 94.3% | 505 | 2201 |
| VK5RR-VK5FO | 75 | 3.7% | 685 | 2220 |
| VK5ST-4 | 1924 | 94.3% | 594 | 1971 |
| VK5ST-9 | 1106 | 54.2% | 5583 | 78 |
| VK5ST-991 | 1199 | 58.7% | 6681 | 4717 |
| VK5SWR | 29 | 1.4% | 2452 | 4446 |
| VK5TRM | 1918 | 94.0% | 1205 | 858 |
| VK5ZM | 1088 | 53.3% | 27628 | 78 |
| VK5ZQV | 1144 | 56.1% | 17661 | 1187 |
| vk5mad | 10 | 0.5% | 6654 | 6838 |
SHSSP 2023 - SHSSPGEIGER Receiver Statistics
| Callsign | Received Packets | Percentage of Flight Received | First-Received Altitude (m) | Last-Received Altitude (m) |
| BARC-RRR | 1965 | 96.4% | 479 | 73 |
| SHSSP-TW | 1876 | 92.0% | 309 | 2744 |
| SHSSP-VM | 1152 | 56.5% | 309 | 5681 |
| VK3BQ | 21 | 1.0% | 34909 | 35370 |
| VK3TNU pi3-2 | 982 | 48.2% | 10105 | 8851 |
| VK5AKK | 1572 | 77.1% | 7898 | 2051 |
| VK5ALG | 1849 | 90.7% | 612 | 4601 |
| VK5ARG | 1955 | 95.9% | 305 | 746 |
| VK5CV | 1 | 0.0% | 676 | 676 |
| VK5LO-5 | 1014 | 49.7% | 16383 | 1998 |
| VK5OI | 1567 | 76.9% | 3711 | 4728 |
| VK5QI-9 | 1875 | 92.0% | 308 | 73 |
| VK5RR-VK5FO | 1089 | 53.4% | 2346 | 24932 |
| VK5ST-4 | 1936 | 94.9% | 495 | 941 |
| VK5ST-9 | 1174 | 57.6% | 5505 | 73 |
| VK5SWR | 1289 | 63.2% | 2868 | 2467 |
| VK5ZM | 1085 | 53.2% | 27698 | 73 |
Receiver Statistics – Wenet Imagery
Unfortunately due to the failure of the SSDV website just prior to launch, we were unable to obtain statistics of who was uploading telemetry throughout the entire flight. Data was recorded until about 1 hour into the flight, and is presented below. The SSDV webpage will be back up and running for the next launch.
Thanks in particular to the stations that setup portable to try and capture as much telemetry as possible from the flight:
This slideshow requires JavaScript.
Nadir-Facing Imagery
SHSSP23_1: 92090 packets (22.48 MB)
VK5QI-9: 64781 packets (15.82 MB)
VK5ST: 16 packets (0.00 MB)
VK5CLD: 4 packets (0.00 MB)
VK5LO: 44346 packets (10.83 MB)
VK5KX: 128164 packets (31.29 MB)
Outward-Facing Imagery
VK5DSP: 20904 packets (5.10 MB)
VK5QI-9: 38550 packets (9.41 MB)
VK5ALG-9: 17343 packets (4.23 MB)
VK5DSPshssp: 13084 packets (3.19 MB)
VK5AKH: 53917 packets (13.16 MB)
VK5PW: 36824 packets (8.99 MB)
VK5KX-2: 52495 packets (12.82 MB)
Conclusion
Even with the non-ideal weather, the SHSSP High-Altitude Balloon workshops and launch went well, with the participants certainly enjoying the experience! Thanks again to UniSA and the International Space University for letting us participate in the SHSSP again this year, and we look forward to building on this in next year’s program.
As always, a big thank you to all of our community members who get setup to track out flights, be it with a portable station, at home, or out on the chase. Keep an ear out for our next launch, which should be happening late February 2023!
SHSSP 2023 - Flight Statistics
| Metric | Result |
| Flight Designation: | SHSSP 2023 |
| Launch Date: | 2023-01-29 01:21Z |
| Landing Date: | 2023-01-29 03:43Z |
| Flight Duration: | ~2.5 hours |
| Launch Site: | -34.02945, 138.69169 |
| Landing Site: | -34.43088, 139.41885 |
| Distance Traveled: | 80.4 km |
| Maximum Altitude: | 35,431 m |












 For those who dont have any equipment, take a look at
For those who dont have any equipment, take a look at