
Horus 72 was a flight for CSIRO – the Commonwealth Science and Industrial Research Organisation, and launched on Sunday the 14th of June 2026.![]()
AREG had been approached by CSIRO a few months ago seeking to trial some sensor payloads on high-altitude balloon flights, and we were happy to get involved! This flight featured a thermal imaging payload intended for use on a future high altitude platform. A big thanks to CSIRO for choosing AREG for their high-altitude balloon launch needs!
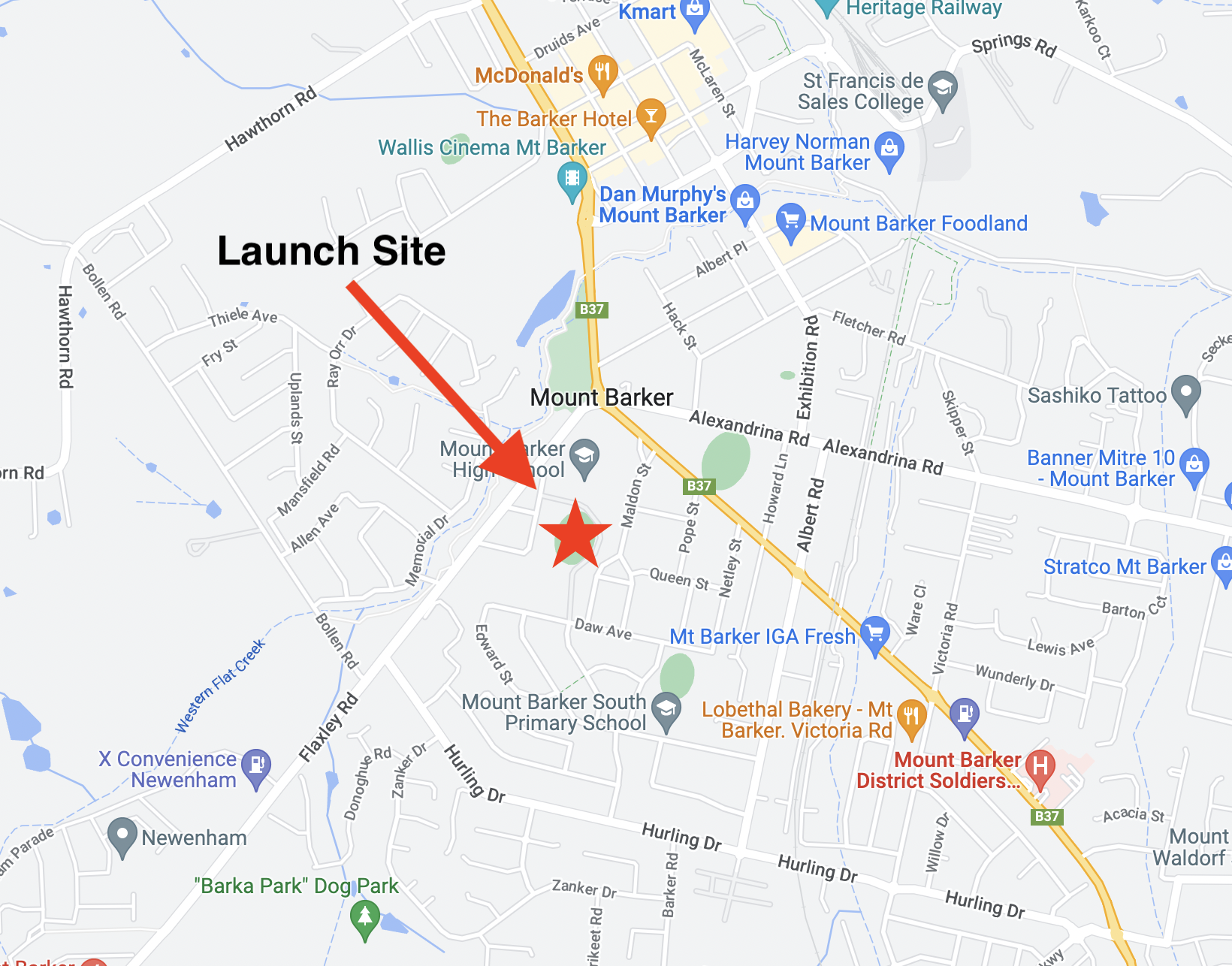
Launch
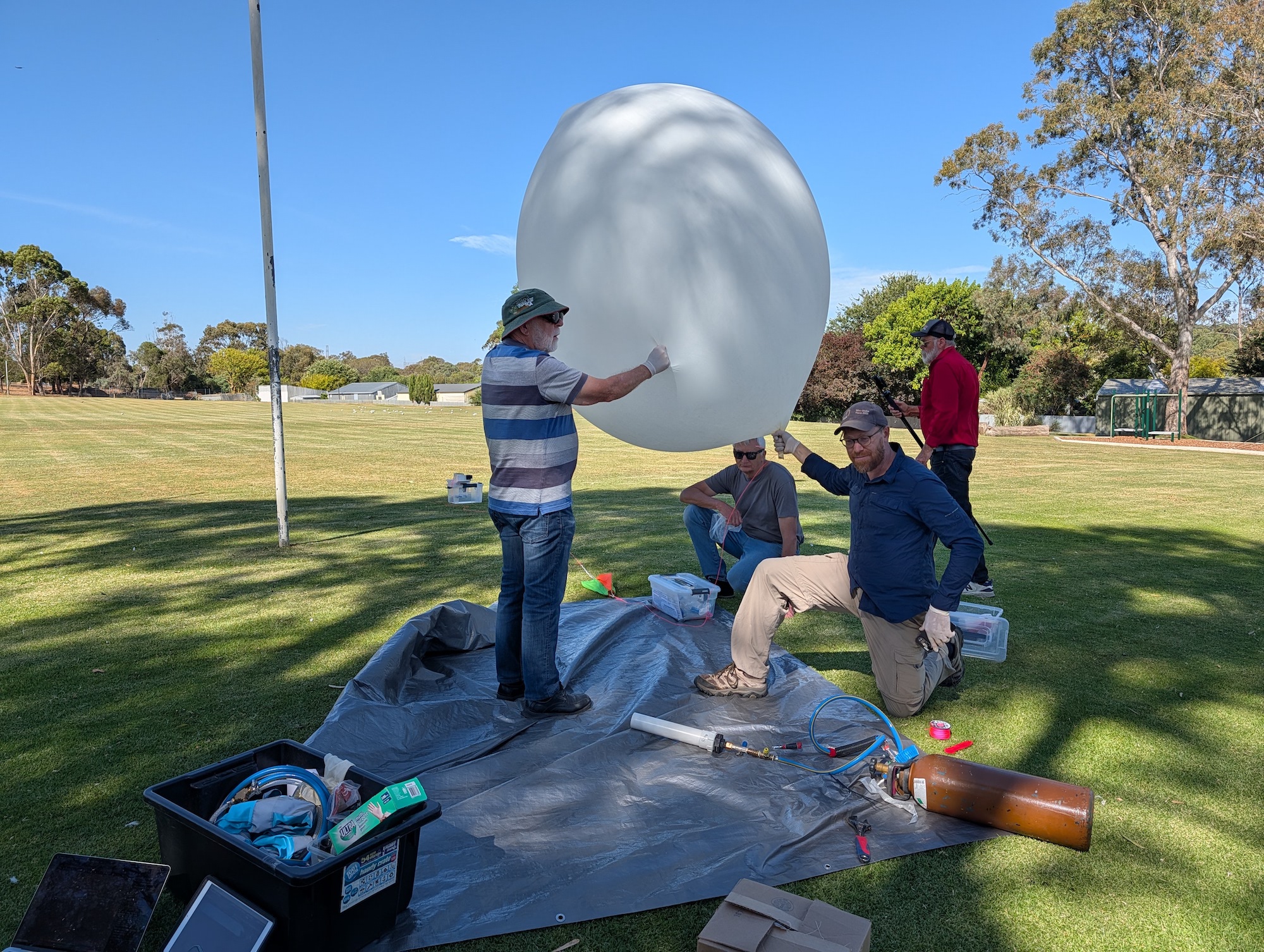
The launch site weather was fairly calm, making for each launch preparations. For this launch we tried to keep the distances between payloads fairly long to avoid ‘interactions’ after balloon burst.
Thanks to Tim Bolton from CSIRO for capturing many great photos of the launch preparations:
















There was a little bit of breeze around launch time, requiring a short ‘running launch’ to avoid the CSIRO payload impacting the ground. The launch was captured on video by Autumn VK5CLD:
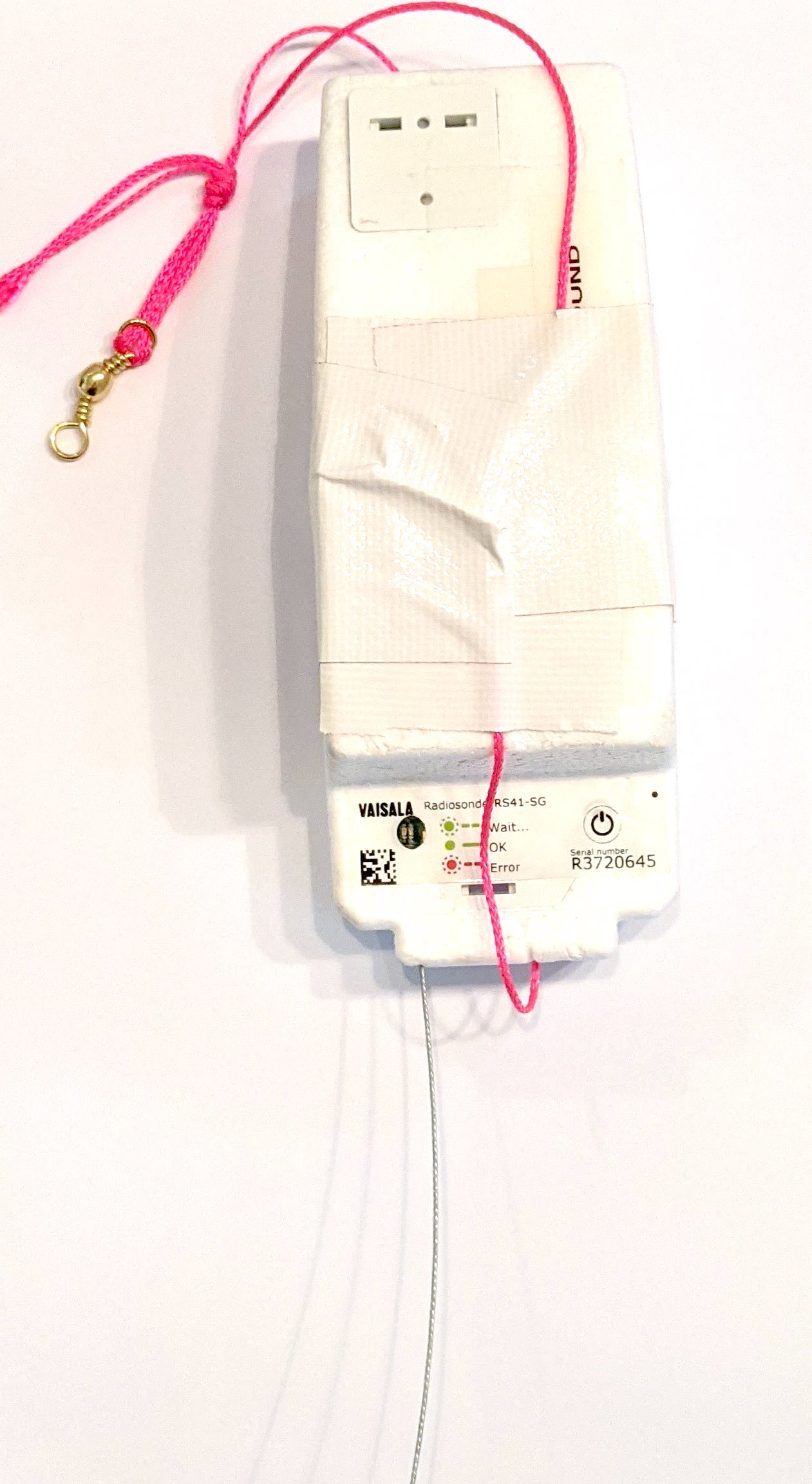
You can see the CSIRO payload at the bottom of the string, with the large stabilisation vanes – these appeared to work quite well, and we may use this approach on our own payloads in the future!
Chase & Recovery
After launch the chase teams quickly got moving – the flight was predicted to be heading out somewhere near Lameroo and Pinnaroo, a good 2 hours drive away.
On the chase we had:
- Mark VK5QI, Will VK5AHV and Autumn VK5CLD
- Andy VK5AKH and Dennis VK5DEN
- Liam VK5ALG
- … and following us was Josh Pease from CSIRO!
The balloon burst at 28855m, and with a somewhat higher than expected descent rate, headed in for a landing about 10k south-west of Lameroo. The chase teams were able to get into position to watch the landing:
A short walk into the paddock, the payloads were all recovered in excellent condition! Most importantly, the CSIRO payload had a nice soft landing, with the thermal camera lens undamaged!





Horus 72 Flight Statistics
| Launch Date: | 2026-06-14T00:51:06Z |
| Landing Date: | 2026-06-14T02:59:11Z |
| Launch Site: | -35.07579, 138.85710 |
| Landing Site: | -35.36621, 140.41932 |
| Distance Travelled: | 145 km |
| Maximum Altitude: | 28855 m |

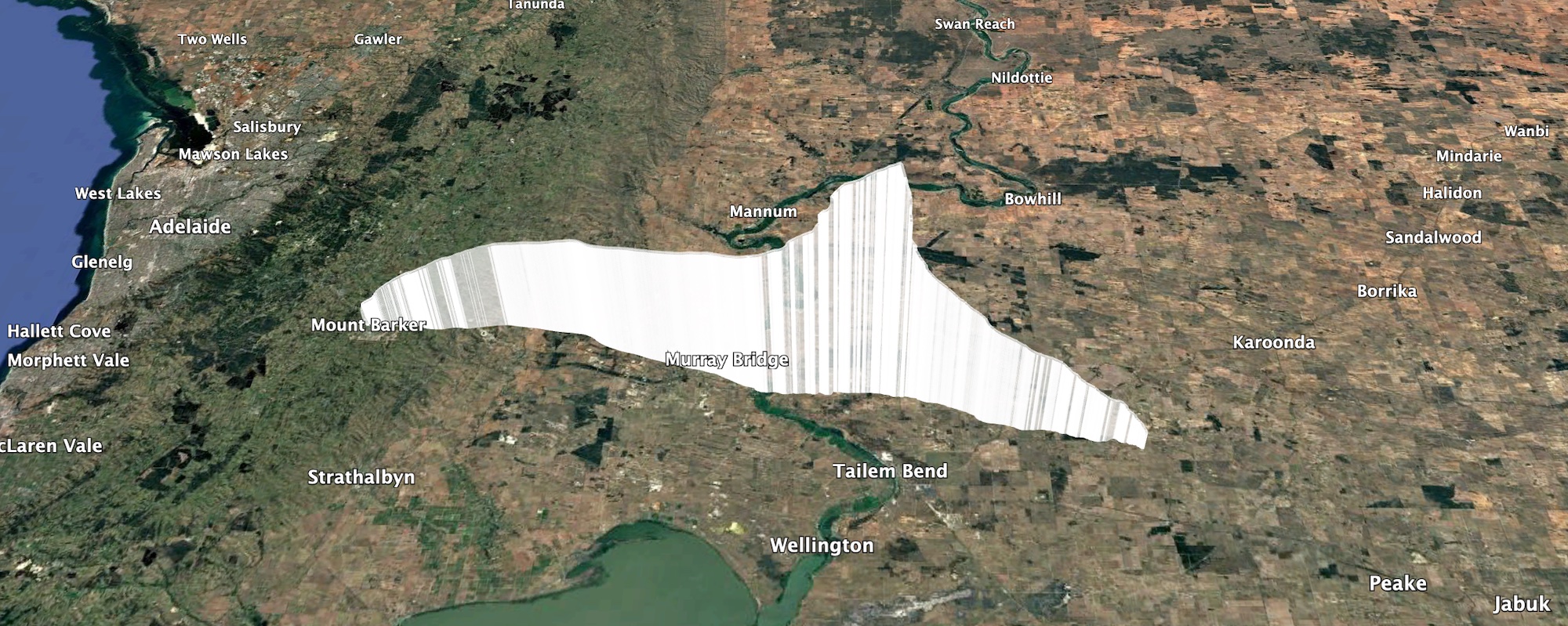
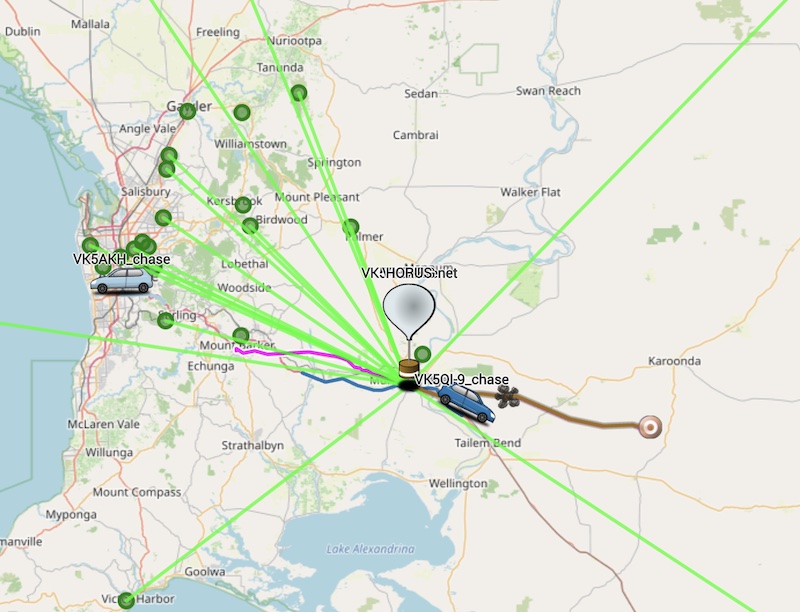
Horus 72 Flight Path
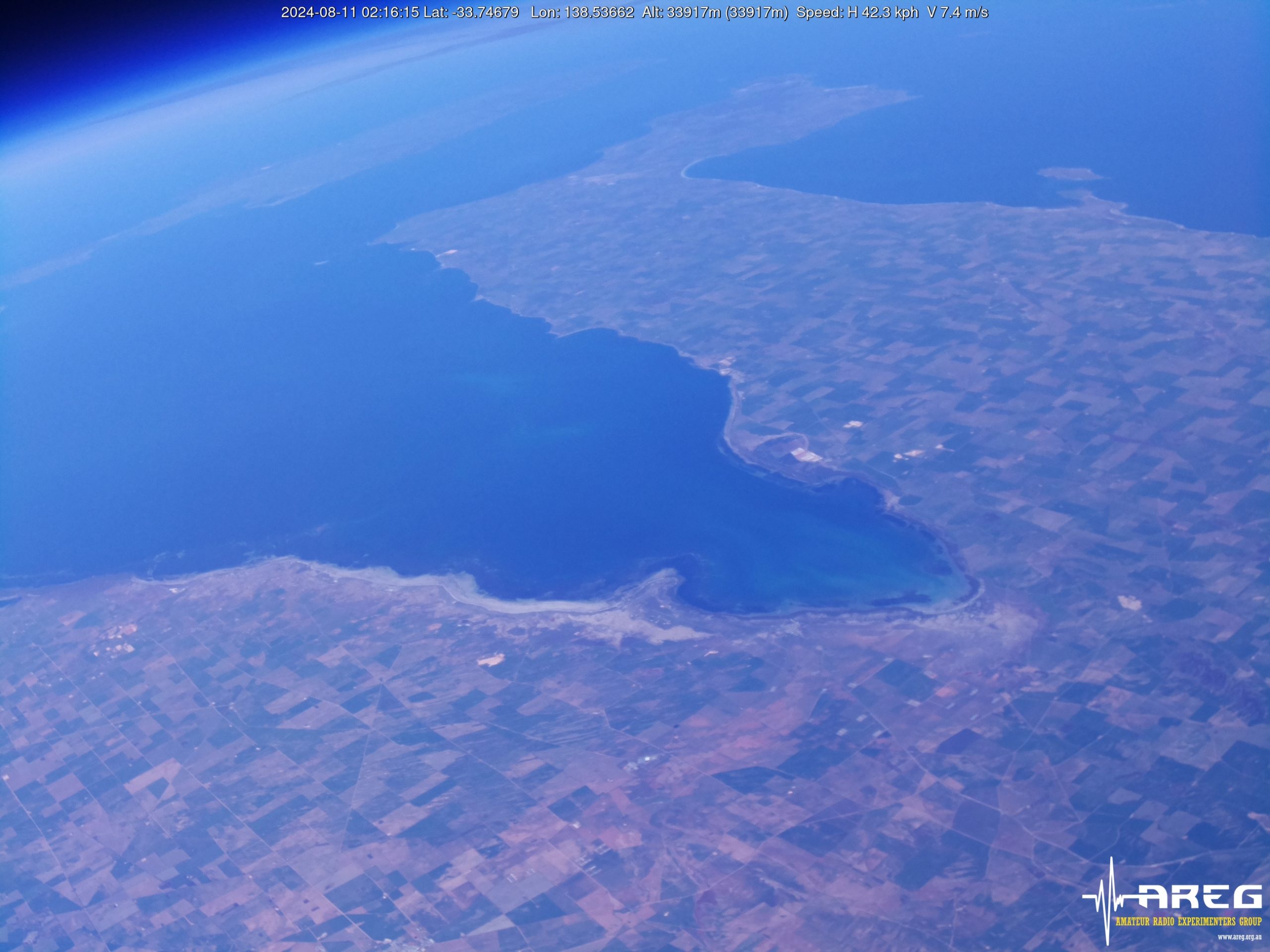
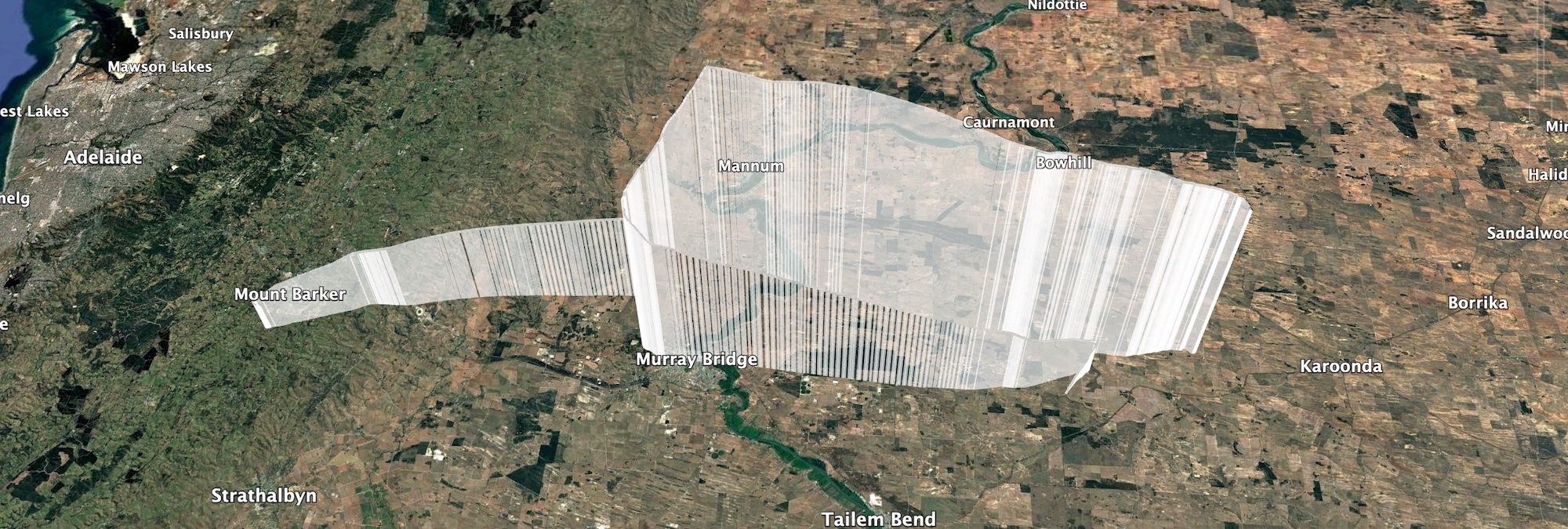
Wenet Imagery
This flight also included a test of a new Wenet payload camera – this time using a PiCameraHQ, with a M12 wide-angle lens. This payload captured nice and sharp (albeit quite fish-eyed) images all through the flight, and is looking to be a winner for future launches!
















Thanks to the following stations for receiving imagery from the Wenet payload:
- VK5ALG-9 (Mobile): 8727 packets (2.13 MB)
- VK3TNU: 62196 packets (15.18 MB)
- VK5AKH (Mobile): 118164 packets (28.85 MB)
- VK5QI-9 (Mobile): 217515 packets (53.10 MB)
- VK5KX-9: 232388 packets (56.74 MB)
A telemetry dashboard for the Wenet payload is available here: https://grafana.v2.sondehub.org/goto/lwwoTnavg?orgId=1
Horus Binary Telemetry
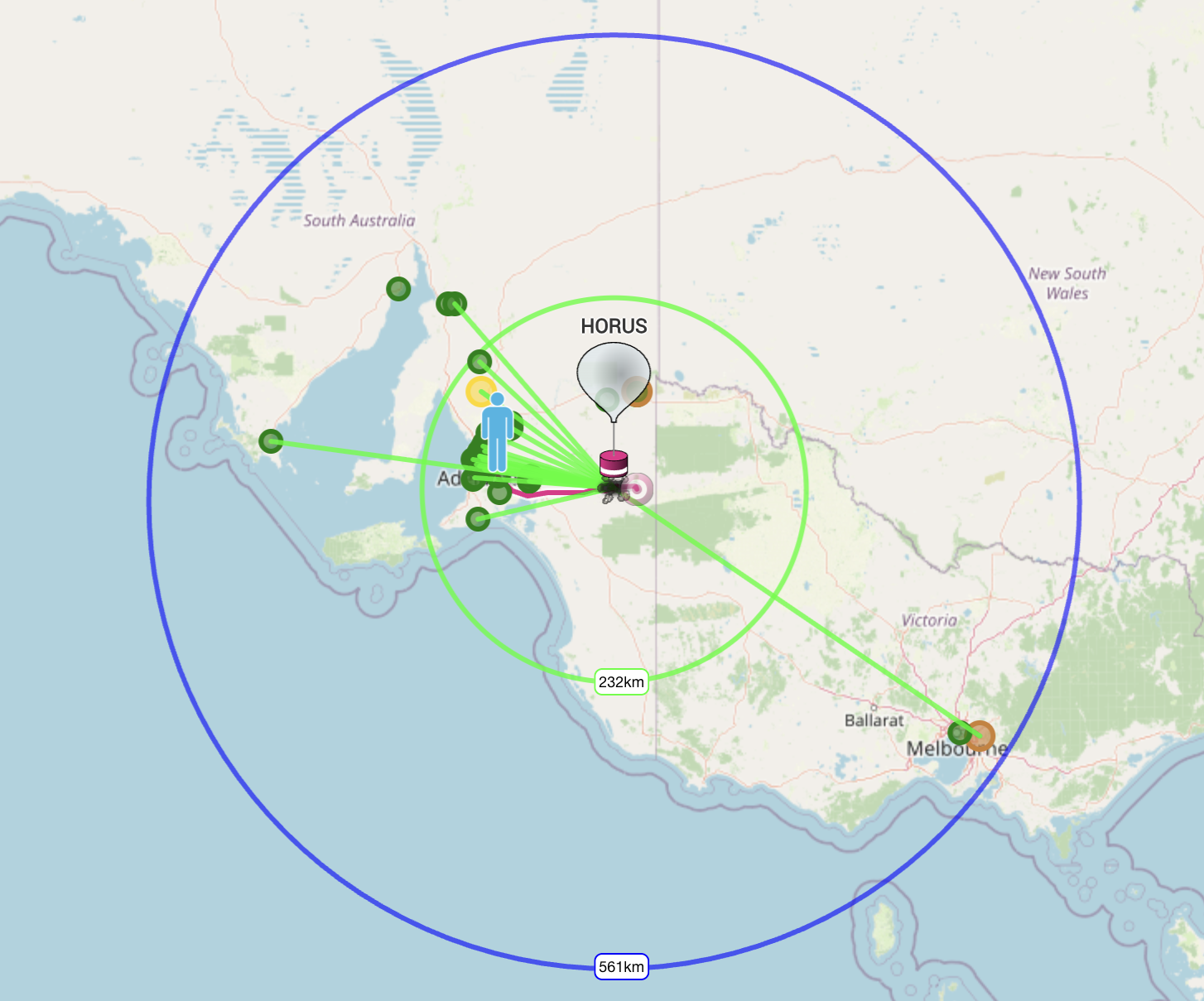
We had a great showing of telemetry receiving stations on this flight, with many stations helping out receiving all three of the tracking payloads:
- HORUS – BARC_RRR, Gum, VK3BKQ, VK5AI, VK5AKH, VK5AKK-H, VK5AKK-V, VK5ALG, VK5APR, VK5APR-9, VK5ARG, VK5BRL, VK5FD, VK5GA, VK5HW, VK5JPH, VK5KX, VK5KX-9, VK5NEX, VK5OCD, VK5QI-9, VK5QI-ChaseBox, VK5SFA/R, VK5ST-991, VK5TBD, VK5TRM, VK5ZAP, VK5ZAR, VK5ZM, VK5ZMD, VK5RK, vk5cv, vk5mhz, vk5zuc, webhorus-pdgl8b
- VK5ARG – BARC_RRR, VK5AKH, VK5ALG, VK5ALG-9, VK5APR, VK5APR-9, VK5ARG, VK5BRL, VK5CV, VK5KX-9, VK5QI-9, VK5QI-ChaseBox, VK5SFA, VK5ST-991, VK5TBD, VK5ZM
- HORUS-2 – BARC_RRR, VK3BKQ, VK5ALG, VK5ARG, VK5BRL, VK5KX-9, VK5QI-9, VK5ST-991, VK5ZM
The longest distance reception was by VK3BKQ, at a distance of 543 km!
Telemetry dashboards for the Horus Binary payloads are available below:
– HORUS – https://grafana.v2.sondehub.org/goto/vSVKTn-vg?orgId=1
– VK5ARG – https://grafana.v2.sondehub.org/goto/os72o7-vg?orgId=1
– HORUS-2 – https://grafana.v2.sondehub.org/goto/Q9C2o7aDg?orgId=1
Next Launches
Since this report took me a while to finish, we’ve already had one other balloon launch – Horus 73, on the 28th of June. You can find a mini-report for this flight here.
We’ll probably take a little break over Winter, as finding good launch days is quite difficult. Once we get into better weather, we expect to run the following launches:
- Cross-Band Repeater re-flight, and more Wenet camera payload experiments.
- Another LaunchBox launch for Fleet Space, hopefully including a 360˚ Camera.
- Possibly another launch for CSIRO.
Stay tuned!

















 Project Horus’s next launch is currently planned for Sunday the 17th of May, with a backup date the following weekend. Launch time is planned for 10AM, with launch crew on-site around 9:15AM.
Project Horus’s next launch is currently planned for Sunday the 17th of May, with a backup date the following weekend. Launch time is planned for 10AM, with launch crew on-site around 9:15AM.



















{kind=link}