AREG is pleased to announce that we hope to have a number of stations active during this year’s WIA Winter field day contest being held by the WIA over the weekend of June 20-21st 2026! At least 5 satations are expected to be active across most bands between 6m and 23cm, including portable activations from Ardrossan, Kulpara, Tarlee and Stirling as well as multiple home stations on the air as well!
We would love to see as many stations on the air on VHF/UHF Simplex in Adelaide during the contest so put it in your diary! Details of the contest can be found on the WIA Website. The event starts at 10:30 am ACST.
During the 2010’s AREG used to regularly enter the John Moyle Field Day contest hosted by the WIA. For various reasons that activity waned in the last 4-5 years. So this year, we felt it was time to re-enter the event and introduce the next generation of AREG members to domestic field day contesting.
VL5X Portable Hindmarsh Island – Multi-Op SSB Portable
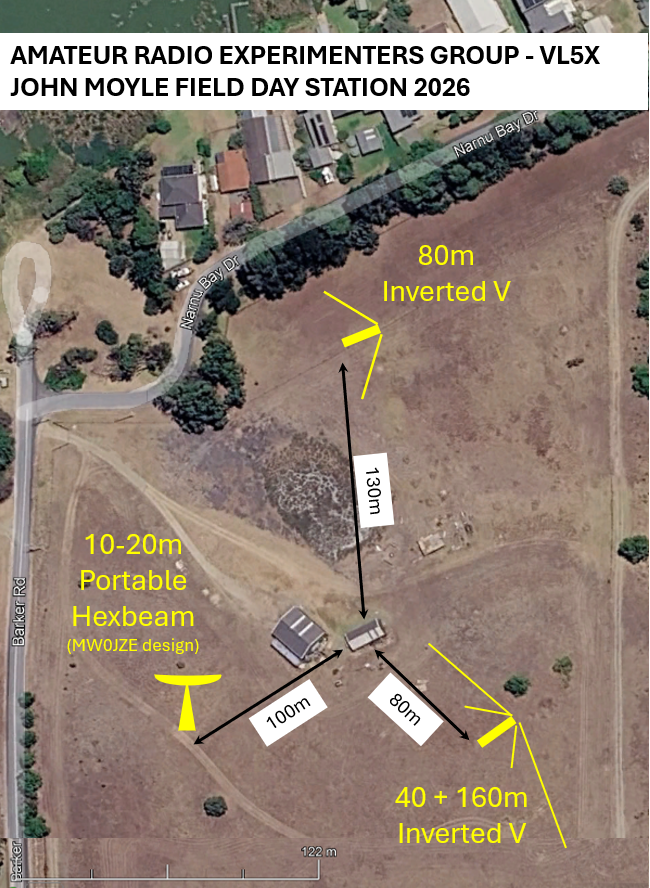
Given this is a “Field Day”, it really needed to be a in the field club activity. That is what puts the “field” into the event after all. This year we were fortunate, through a friend of one of our members, to gain access to a 10 acre plot on Hindmarsh Island, about 90 minutes out of Adelaide. The site, which had a 10-15m hill at the back of the property and a couple of sheds in the middle was perfect and allowed us to spread the antennas out so we could operate a multi-operator station without causing interference between the bands.
Station Antenna Farm
Unique “Quick Deploy” Station experiment
One of the unique tricks used in this contest was Andy VK5AKH’s quick deployment station. He hired a van for the weekend, rolled his portable operating desk inside, loaded it up with gear and away he went. He was on air within an hour of arriving on site supporting our full 40m station.
Powering The Station
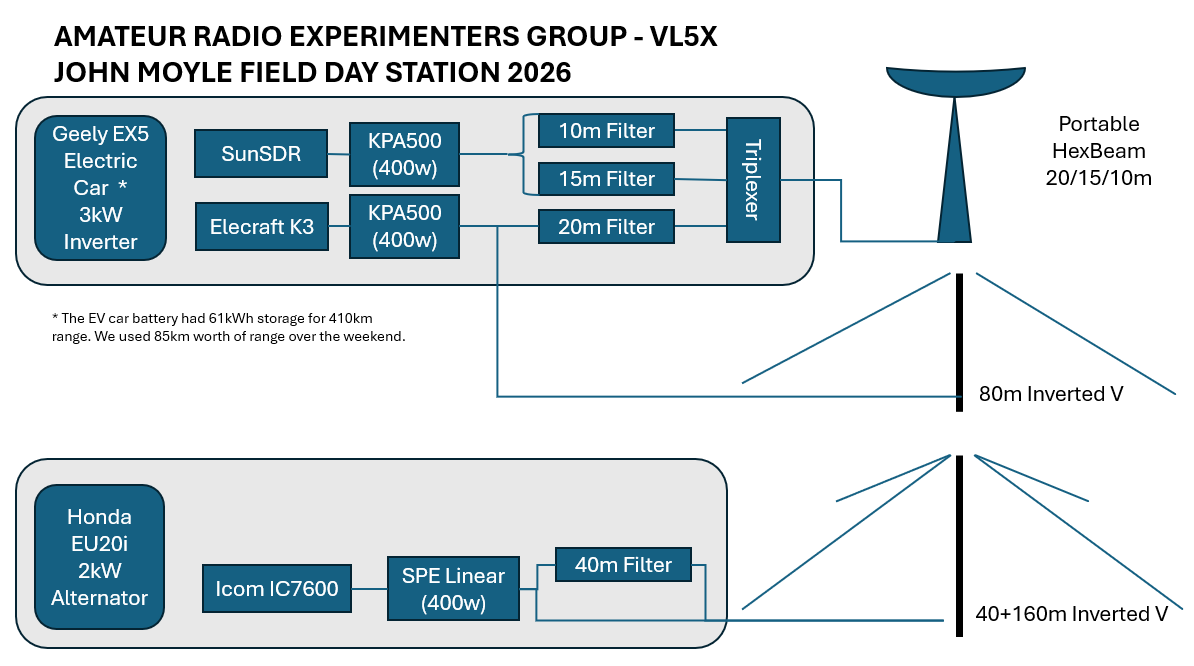
We set up three 400W portable contest stations on the site and then proceeded to power them as follows:
We had 3x Honda EU20i generators on site, originally planning that as our base load generation, given this contest did not permit us to use the mains to run the station. However, we also had something new that we had never tried before.
One of our members owns a Geely EX5 electric car. This car was unique in that it came equipped with a 3kW 240 Volt AC inverter, which we could use to draw power from the car’s 61kWh battery! Before the event, we were pretty trepidatious – concerned that the car would generate a lot of RFI and interference across HF. To our very happy surprise, however, the car was as quiet as a church mouse. In the end, we ran 2 of the three stations on the car inverter for the whole event. In the process, we invented a new unit of electrical consumption – “equivalent kilometres”. The two stations connected to the car, each with their respective 400W linear amplifiers, used a total of 65km worth of electricity. Not bad given the car has 410km of road range. This really does open up a whole new world for field day contesting into the future!
VL5X On The Air
As for operating the contest, we had a great turnout of operators, with VK5AKH, VK5QI, VK5FLY, VK5DUG, VK5VC, VK5FJ, VK5IR, VK5GR, VK5MN, VK5CIA. We also had a great roster of volunteers who helped construct and support the station including VK5ZM, VK5BX, VK5AG, VK5ZQV, VK5SAW, VK5KX, VK5AOK and others plus we had visits from Sue VK5AYL and David VK5ZL who were also interested to see what we were up to here at AREG.
We had operators as young as 10 yrs old (Douglas VK5DUG supported by dad Louis VK5FLY) right through to some in their mid 70s who remembered the John Moyle field day from a decade ago and wanted to come back and have another go. It was great to see them all getting into the spirit of the contest.
The crew was well looked after as well with support from Michael VK5MN who managed the catering and Jeremy VK5CIA who provided the bathroom facilities from his holiday home nearby. All the little things that become big issues when you are out in the field!
Thanks to Theo VK5IR, we also have a short film showing the setup including a few more details about the car we used to power the station and showing some of the on air activity including young Douglas VK5DUG who operated for us on several bands.
So how did we go?
Results are not out yet, but we were pretty happy with our score. We had the station manned for 22 of the 24hrs of the contest, and due to the lack of contestants during the night spent at least 2 hours calling with no answers. None the less, a great time was had by everyone. We look forward now to seeing the results and discussing what we might try next year!
Update: Thanks to everyone that helped out with this launch! A full writeup will be published in the coming weeks.
AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 13th of July, with a planned launch time of 10 AM ACST.
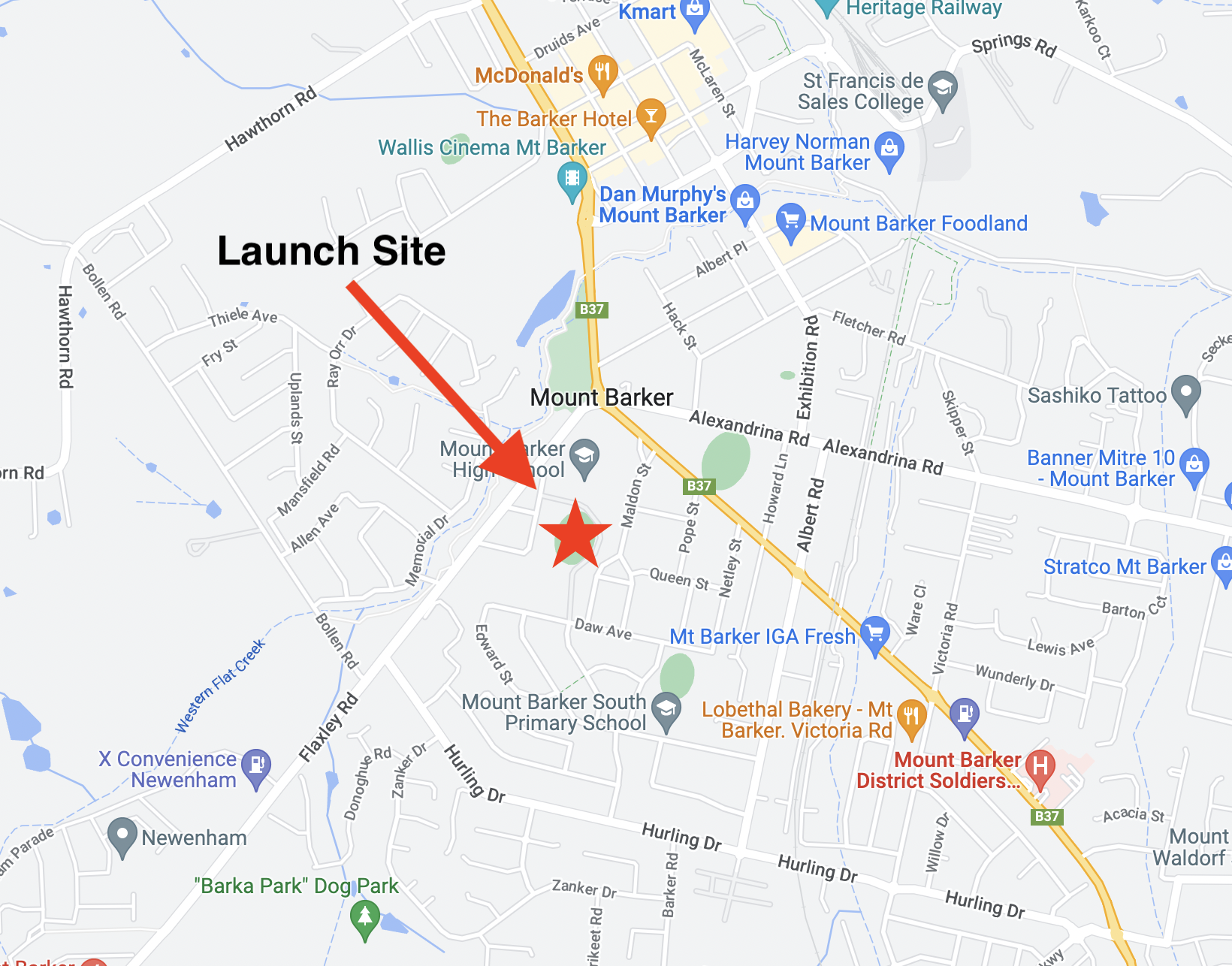
This launch is currently planned to be performed from the Mt Barker High School Oval with the launch team arriving on site from around 9:30 AM. Note that access to the oval is via Stephenson street, and parking near the oval is extremely limited. We are expecting significant wind gusts at the launch site – be prepared!
Details of the frequencies in use on this flight are:
Wenet Imagery on 443.5 MHz. (Now receivable using a web browser! See below!)
Primary Horus Binary telemetry on 434.200 MHz – callsign ‘ITSWINDY’
On this flight we encourage new listeners to try out our new web-browser-based decoding software for Horus Binary and Wenet – find out more about this further below!
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
Horus Binary telemetry can now also be received using your web browser, using either a SSB receiver or even a RTLSDR!
Click this link to start up a browser-based receiver:
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115 kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
Wenet can now be received on almost any modern computer, and even some newer android devices, using the new WebWenet software! This operates entirely within a web browser. Information on how to get setup to use this is available here: https://www.youtube.com/watch?v=Euo4BGB6wUU
Click this link to start up a browser-based receiver:
This payload will be alternating between standard Wenet transmissions and an experimental new version of Wenet which runs at a slightly lower baud rate and a narrower bandwidth. The transmitted mode will change between images, so if you aren’t decoding anything immediately, be patient and wait for the next image!
You can try out receiving the new version of the Wenet signal using WebWenet at this link:
We encourage new listeners to try out the WebWenet software for decoding signals on this flight – however you can also still receive the signal using the Linux-based decoder, with details on this available here:
For April’s meeting (on Friday the 18th of April, the Good Friday public holiday), AREG will not be holding a meeting at the Fulham Community Centre. Instead, we’ll be trying something a bit different and meeting up in a park for a BBQ lunch, HF activation, and some fox-hunting!
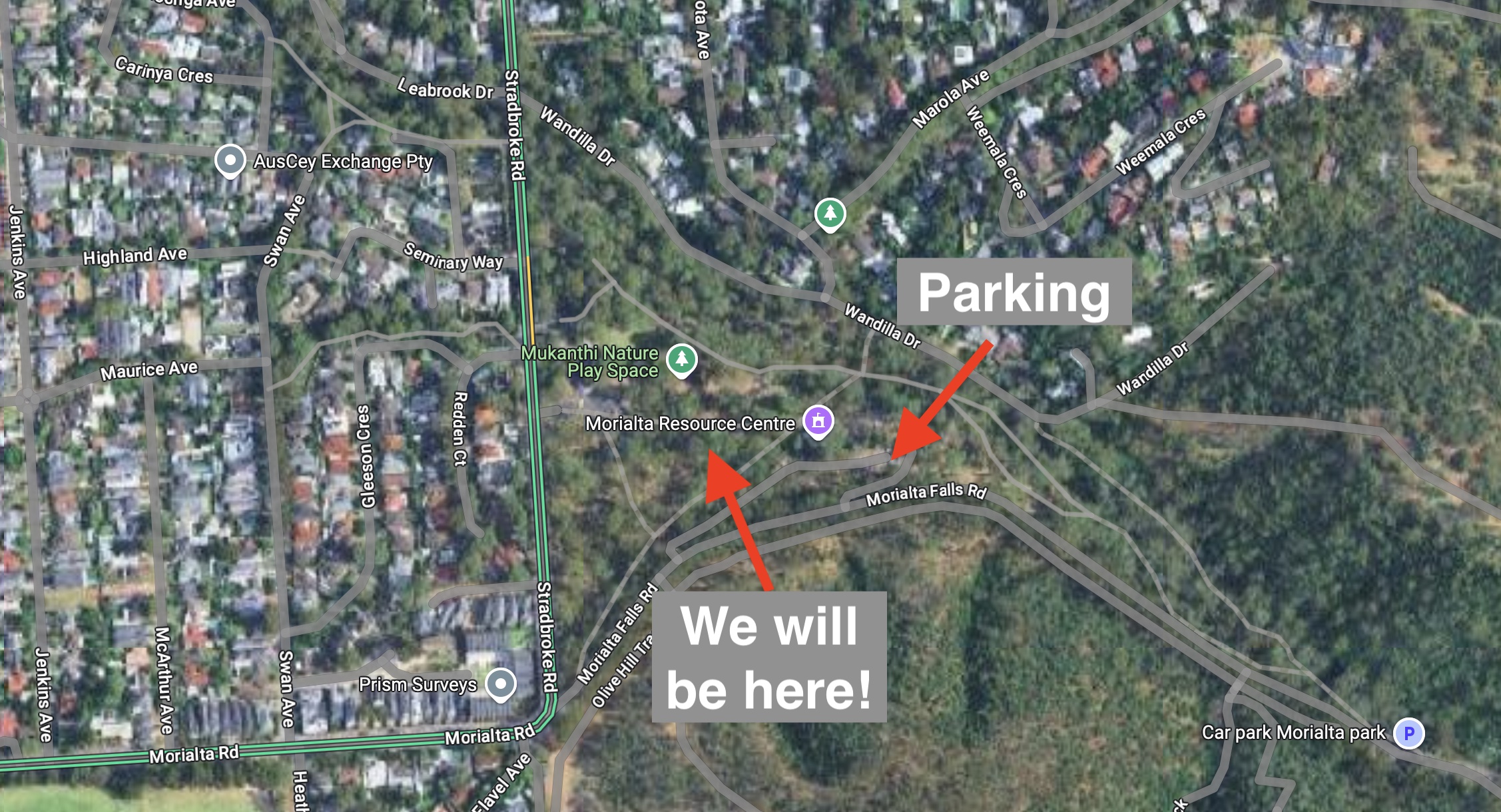
We’ll be meeting at the lower section of the Morialta Conservation Park from around 11AM with parking available off Moritalta Falls Road. We’ll be near one of the BBQ areas, so look out for a red AREG flag!
We’ll have a HF station going to activate the Morialta Conservation Park (VKFF-0783) so listen out for VK5ARG on the bands! There will also be a fox-hunting (amateur radio direction finding) course set up around the park, with plenty of equipment available to borrow and give fox-hunting a go.
If you’re coming along, we suggest you bring a chair, drinks, and food for lunch (the club will provide some basic BBQ fare too).
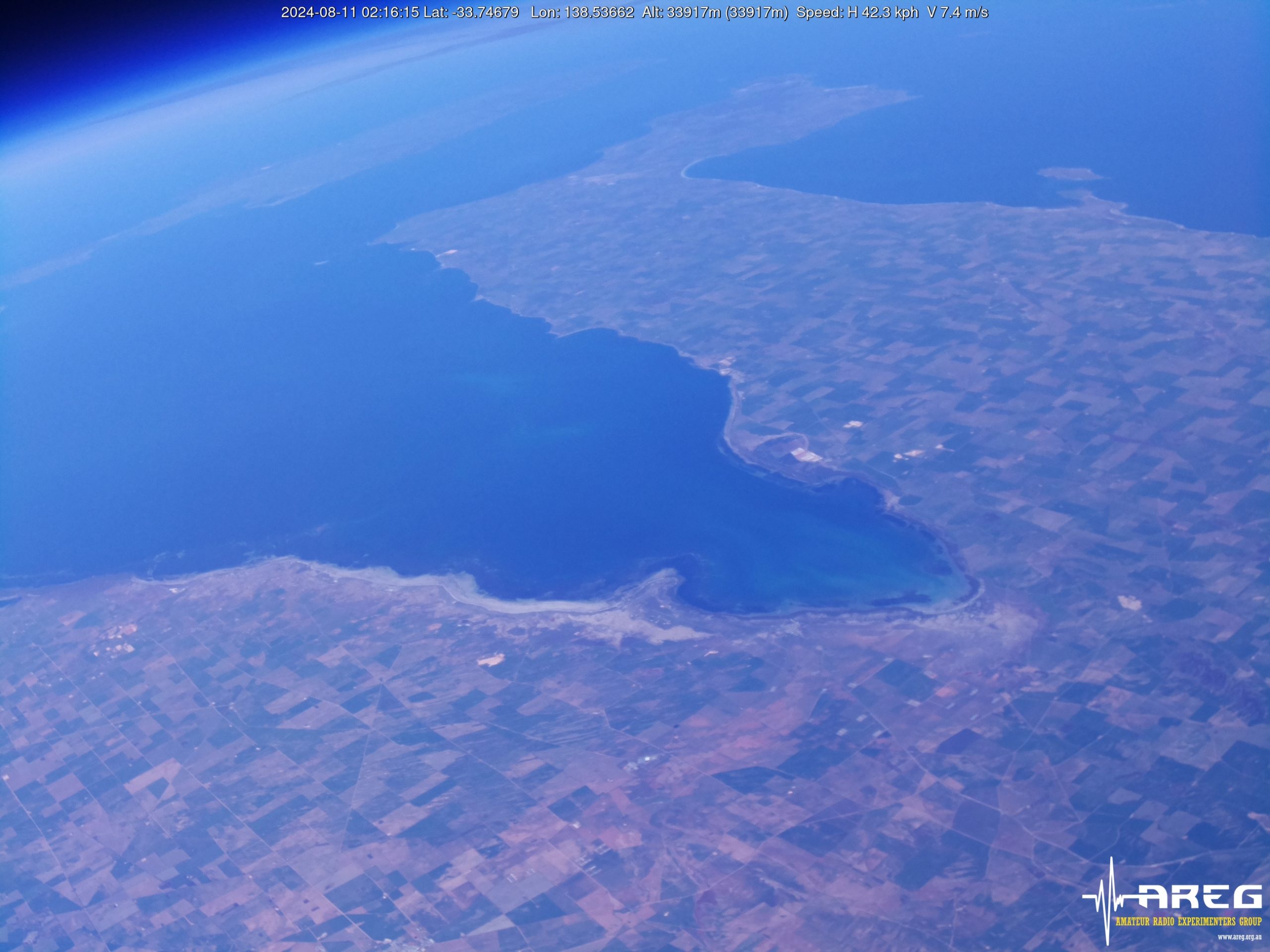
Project Horus’s 63rd launch was run on the 1st of December 2024. This was the first flight of our new 2m/70cm cross-band repeater payload, and also flew an experimental imagery payload. The flight reached an altitude of 31359m before landing in a paddock to the east of Walker Flat. 68 different stations were heard on the cross-band repeater throughout the flight – a great result, and one that we hope to best on a future launch!
Launch, Chase & Recovery
Launch was a fairly relaxed affair, with a fairly small launch crew and fairly good weather at the launch site. A large flock of corellas did cause us a bit of concern, but thankfully they stayed clear of the balloon.
A time-lapse of preparations and launch is shown here:
After launch, the chase teams headed off towards the landing area, via a quick stop at Bowhill for coffee. This launch had Mark VK5QI and Will VK5AHV; Autumn VK5CLD; and Peter VK5APR chasing from the launch site.
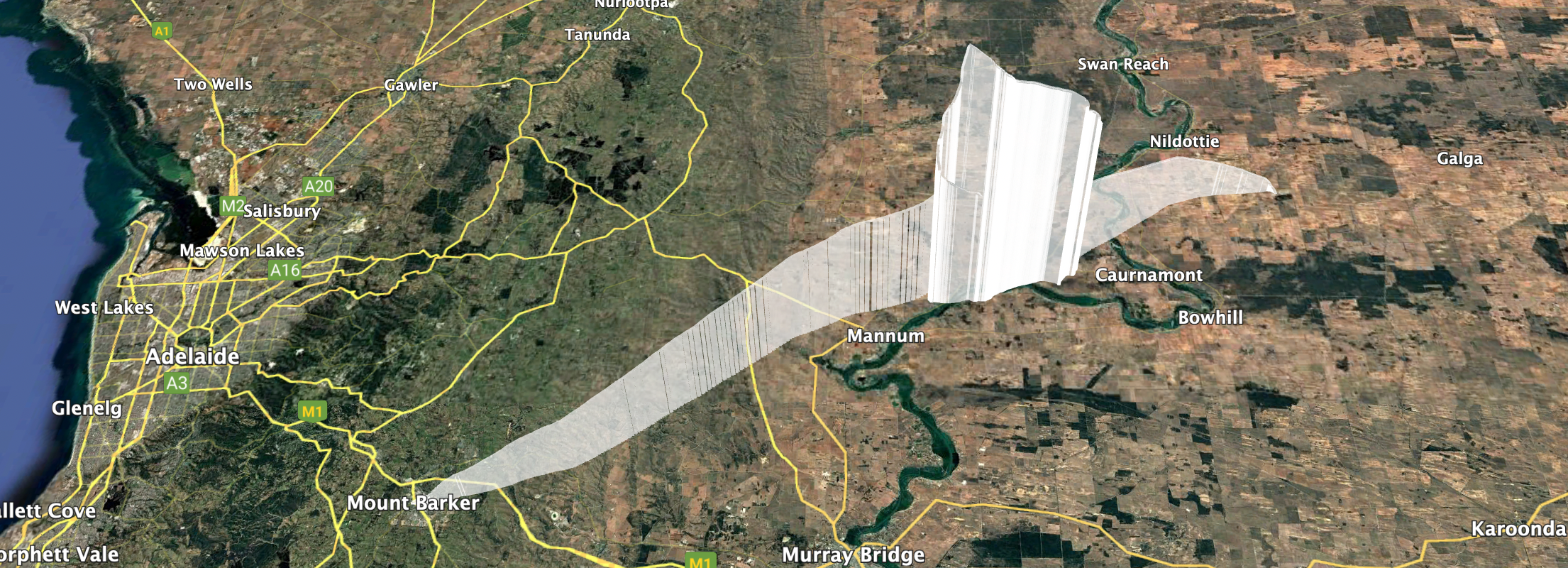
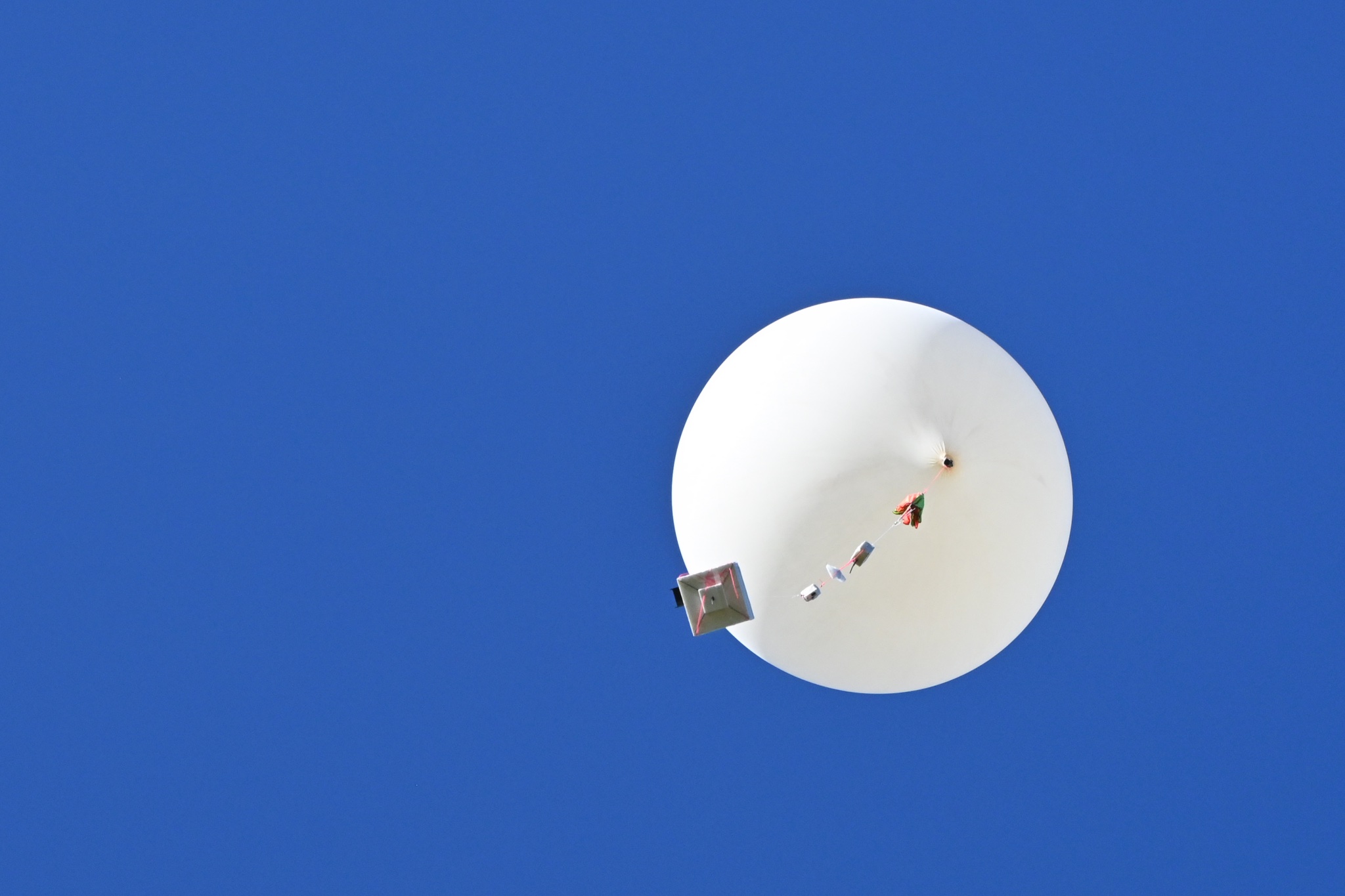
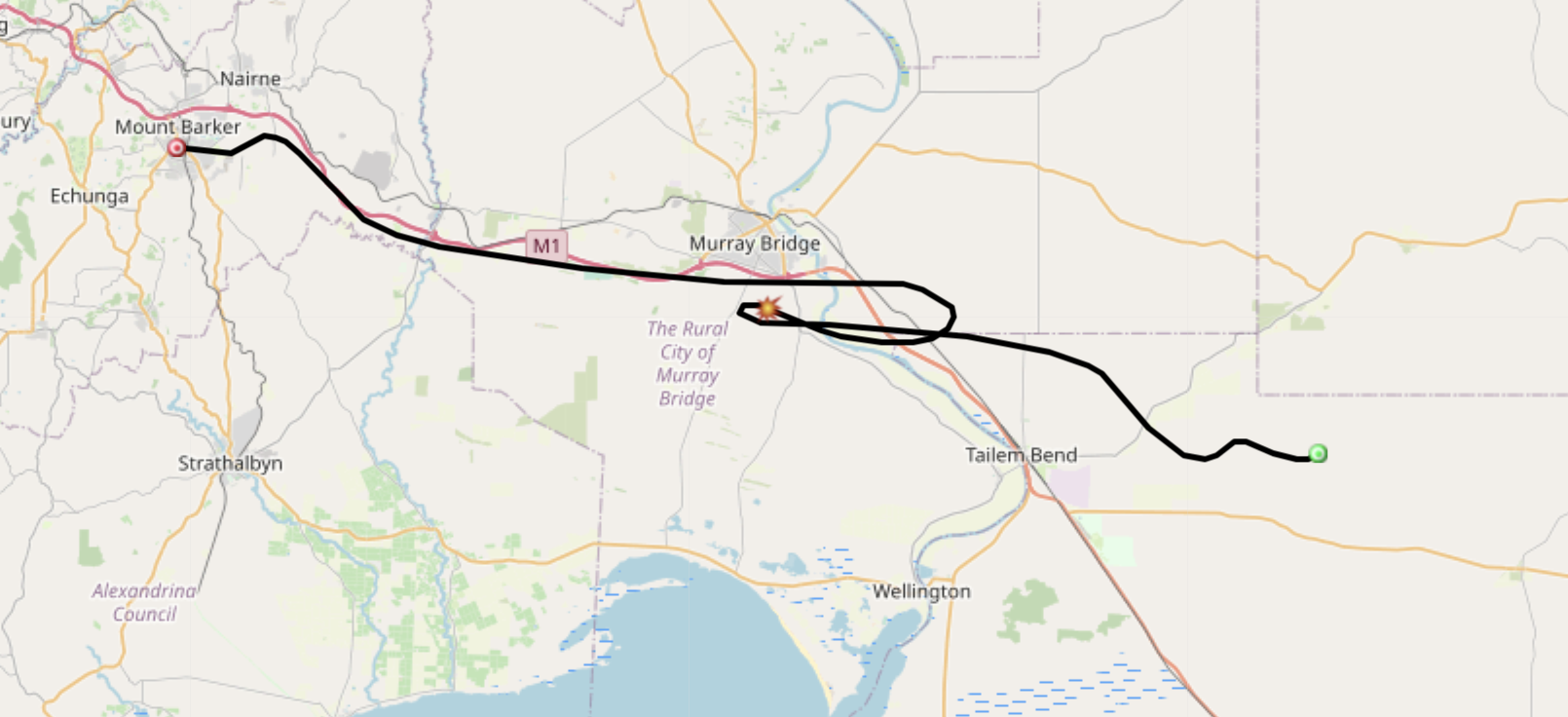
The balloon reached a peak altitude of 31359 m above Younghusband, before bursting and descending for a landing to the east of Walker Flat.
Horus 63 Flight Profile
As the chase teams from Mt Barker arrived near the landing area, they met up with Darin VK5IX and family (Glenys, Greg and Cameron), who were also out chasing. Everyone pulled over on the side of the road and were able to just catch a glimpse of the payloads landing on a paddock about 500m from the road.
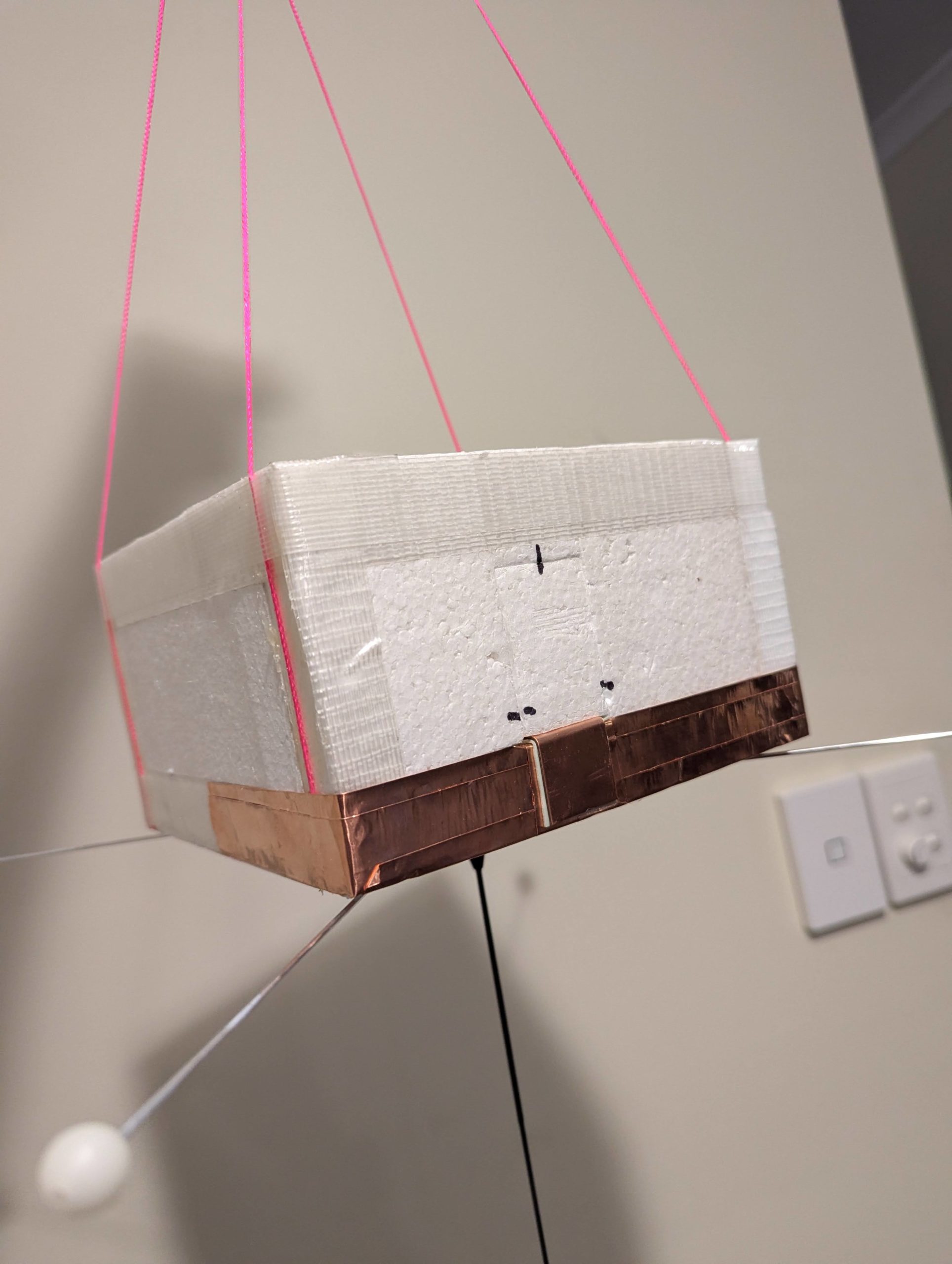
Horus 63 payloads, as found – note the cross-band repeater antenna pointing up!
The repeater was found to still be operational after landing, and the team were able to use this while coordinating the recovery. After obtaining permission from the landowners, the paddock was entered carefully (very sandy!) and the payloads recovered – with the obligatory Wenet payload team photo!
Cross-band Repeater Payload
The cross-band repeater performed flawlessly on its first outing, with contacts quickly filling up the log books of VK5ARG net control, run by Grant VK5GR. A big thanks to Grant for managing the repeater so the chase teams could focus on recovery!
The following stations were recorded in the log during the flight (displayed in alphabetical order):
Based on the log, we believe the furthest contacts were to Michael (VK5LN) in Pt Lincoln, and Tim (VK3TNU) in Horsham, Victoria – both around 325 km! Unfortunately the flight didn’t quite get high enough for reliable contacts in to Melbourne.
Theo VK5IR live-streamed the repeater contacts on Facebook throughout the flight – a recording of this is available on Youtube here:
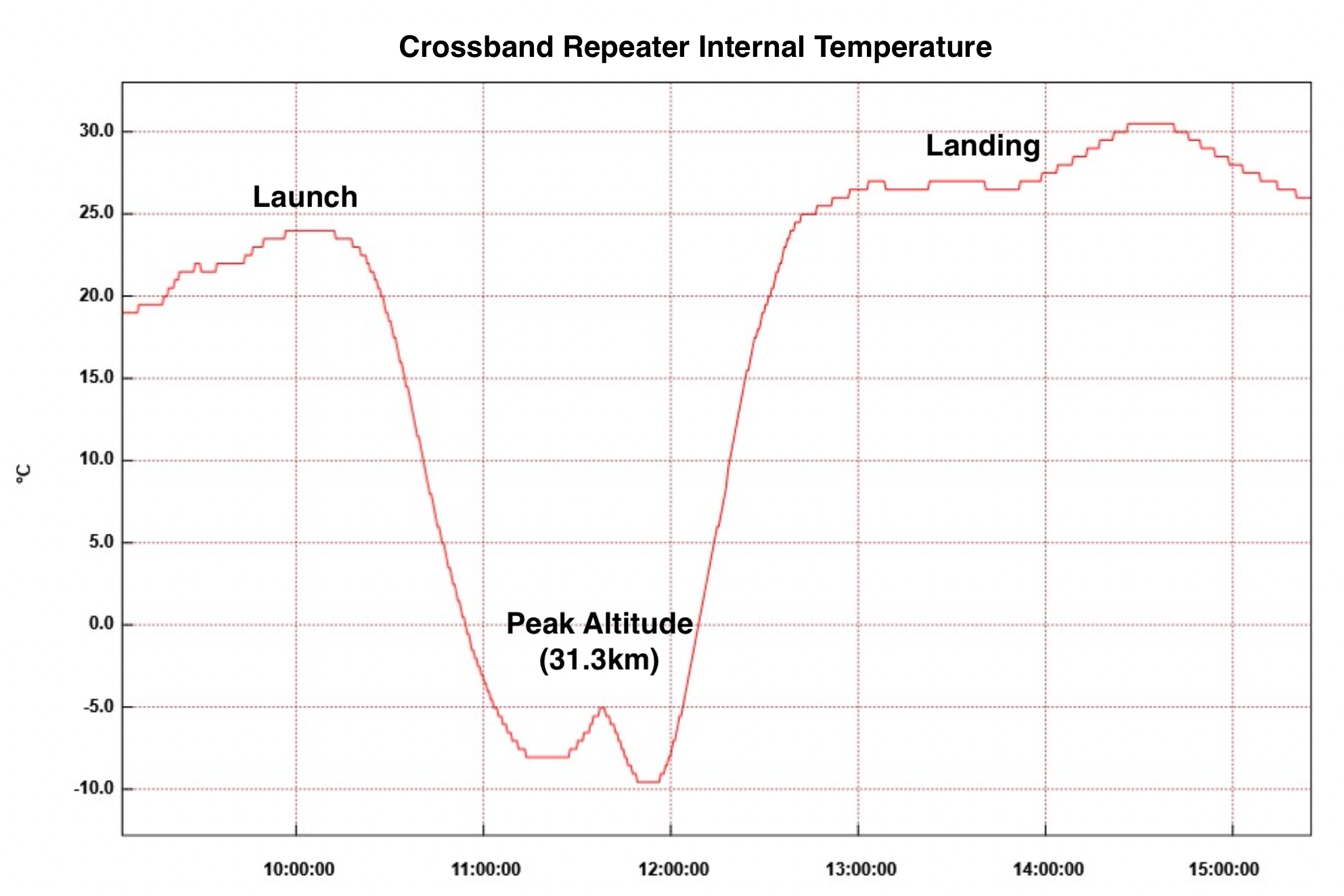
One of the concerns with this payload was how hot (or cold!) it would get throughout the flight. Peter VK5KX provided a temperature logger which was installed into the payload box. This showed that the payload’s temperature stayed in a fairly reasonable range, dropping down to -10˚C during the ascent, and rising up to 30˚C after landing.
We’re still finalising our QSL card design for this flight – these will most likely get sent by the WIA QSL bureau to save on costs. If you’re not a members of the WIA and would like to be sent a card directly, please contact Mark at vk5qi@rfhead.net.
This repeater (after a few repairs) will certainly make an appearance on future launches, with the next aim to get it up to >35km to allow more contacts into VK3. We may also look into increasing the transmit power from 0.5W to 1.5W.
Primary Tracking Station – VK5KX & VK5ZM
Up on Angas Valley Road, overlooking the Murray-lands area, Peter VK5KX and Matt VK5ZM had set up a portable ‘super station’, which provided reliable reception of the imagery and telemetry throughout the flight. Peter’s station used a Wimo 70cm X-Quad beam on a Az/El rotator, while Matt’s used a vinnant.sk 70cm turnstile. Peter was able to receive almost all of the imagery transmitted during the flight! Grant VK5GR was also setup nearby running net control for the repeater – thanks guys!
Thanks to Glenys Roberts for the photos from the receiver site.
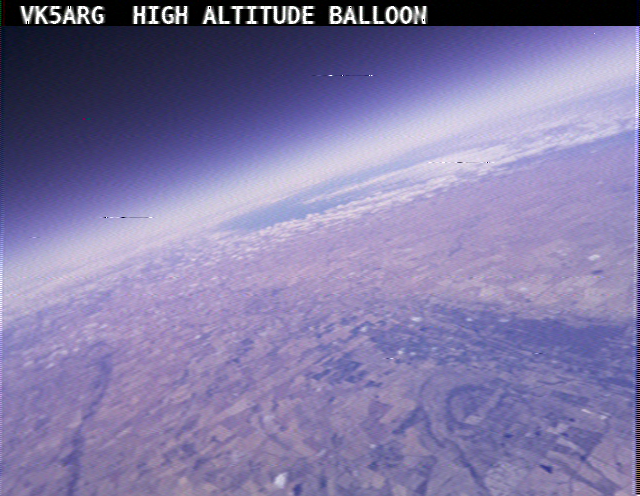
Wenet Imagery Payload
This flight aimed to evaluate the PiCam v3 camera (previously tried on Horus 59) in auto-focus mode, with lots of software improvements and additions from the previous flights. Many more telemetry datapoints were transmitted in realtime during the flight, including RPi CPU and Radio temperature, and even the live lens position as the PiCam v3 attempted to autofocus.
Sadly we still had autofocus issues resulting in many blurry images, however the additional telemetry transmitted to the ground during this flight provided a lot of data to help improve performance on future launches. The full telemetry from this payload is available on a Grafana dashboard here.
A big thanks to the stations that set up to receive Wenet imagery and telemetry on this flight:
We’d also like to thank the Raspberry Pi foundation developers for providing lots of advice on how to best optimise the autofocusing system, and we plan to continue working with them to push the limits on what a PiCam v3 can do!
Horus Binary Telemetry Payloads
Our trusty Horus Binary telemetry payloads worked fine throughout the flight, providing our primary flight tracking ability. Thanks to the following stations that helped track these payloads:
Liam’s TheThingsNetwork payload flew again, with a total of 98 gateways receiving telemetry. The furthest receiver was located near Finley, NSW, at a distance of 557km.
A map showing the receiver locations is below, with more detail available on the flight dashboard.
Conclusion
Thanks to everyone that participated in this flight, through helping at the launch, tracking, chasing, or calling into the repeater!
We hope to do a re-fly of this launch in the new year (towards the end of summer), aiming to get the repeater payload up high enough to give coverage further into VK2 and VK3 – stay tuned!
AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 1st of December, with a planned launch time of 10 AM ACDST. If we have to scrub due to poor weather, the backup launch date will be the 8th of December.
UPDATE 27th Nov: This launch is currently planned to be performed from the Mt Barker High School Oval with the launch team arriving on site from around 9:15 AM. Note that access to the oval is via Stephenson street, and parking near the oval is extremely limited.
This flight will feature a new cross-band repeater payload, enabling amateur radio operators around the state to communicate via the balloon! Along with this will be a newly built Wenet Imagery payload, using a PiCam v3 in autofocus mode.
This is the first test flight of a new experimental FM cross band voice repeater based around a Yaesu FT-530 handheld transceiver.The balloon repeater should be heard on:
INPUT: 145.075MHzwith 91.5Hz CTCSS
OUTPUT: 438.975MHz – 0.5W into 1/2-wave omni
Please note that this repeater is experimental, and may have performance issues or even fail completely during the flight!
To transmit to the balloon at the maximum range of 800km (once the balloon reaches 100,000ft ++) you should only need approximately 10-20W and an 2-4dB gain antenna.
Receiving the balloon at 400km range in a handheld environment should be achievable, but to hear the repeater at the maximum range of 800km you should expect to need a 10dB gain Yagi for a 0.4uV capable receiver and 2dB feeder loss
This setup is much the same as the LEO satellites but without the doppler shift.
PLEASE MAKE SURE YOU CAN HEAR IT BEFORE YOU TRANSMIT!
This repeater will be operated as a controlled net, with the net control callsign VK5ARG – please listen out for net control before calling!
We will be offering QSL cards to stations that make a contact with net control during the flight, so get your stations setup and give it a go!
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
Listeners that already have Horus-GUI installed are encouraged to update to the latest version, which is available at this link.
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
A backup tracking payload will be transmitting on 434.210 MHz using the Horus Binary 4FSK data mode, and can be received in the same way as the primary tracking payload, with information above. For this payload you will need to use a USB ‘dial’ frequency of 434.209 MHz.
Wenet Imagery – 443.500 MHz
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a Linux computer, a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
This payload will be experimenting with a PiCam v, which we previously flew with only partial success on Horus 59. This time around many software updates have been written, hopefully allowing the PiCam v3’s autofocus to work on a balloon launch. This flight aims to test out these software changes, and gather data to help improve performance on future launches.
Please note the transmit frequency of 443.5 MHz, which may require listeners to re-configure their Wenet setup.
Note: Stations that are already ready to receive Wenet are advised to update to the latest testing version for this flight. See here for instructions: https://gist.github.com/darksidelemm/cdc36a90ca96b87d148fdd7d68d5d5fe
This flight will also fly a LoRaWAN payload built by Liam VK5ALG, relaying positions via TheThingsNetwork (TTN), a global Internet-of-Things network with hundreds of receiver gateways across Australia. You can find out more about how TheThingsNetwork works here.
The aim of this payload is to test a new antenna, and try and beat our previous range records on the 915 MHz band.
UPDATE 21/8: Thanks to all that helped track this flight, it was a great success! A blog post with more information, including lots of great images, will be up in about a week.
Horus 60 Flight path prediction as of 17th August
As part of the VI25AREG celebrations, AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 20th of August, with a planned launch time of 10 AM ACST. Backup dates if we have to slip due to weather are the 27th of August… and that’s it!
This launch is currently planned to be performed from the Mt Barker High School Oval with the launch team arriving on site from around 9:00 AM. Note that access to the oval is via Stephenson street, and parking near the oval is extremely limited.
The payloads for this flight will include:
A FM-SSTV Transmitter on 145.100 MHz
A Wenet Imagery transmitter on 443.500 MHz
Primary Horus Binary telemetry on 434.200 MHz
Experimental Radiation Sensor payload (Horus Binary telemetry) on 434.210 MHz
Details on these payloads are available further below.
Tracking of the flight will be via the SondeHub-Amateur tracker, available by clicking this link.
Details on the payloads flying are available below:
Primary Telemetry – 434.200 MHz – VI25AREG
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
Listeners that already have Horus-GUI installed are encouraged to update to the latest version, which is available at this link.
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
There will also be an experimental radiation sensor payload (HORUSRADMON) on 434.210 MHz (434.209 MHz USB dial frequency). If you can only receive one, prioritise the 434.200 MHz signal.
FM SSTV Imagery – 145.100 MHz
This launch will most likely be flying a FM SSTV transmitter operating on 145.100 MHz FM. It will run approximately 200mW transmit power. The transmitter will have 1 minute gaps between image transmissions to avoid overheating the transmitter. This payload last flew on Horus 59 with good results.
SSTV image from Horus 59
The payload will be transmitting images using the PD120 SSTV mode throughout the flight, and can be decoded using any SSTV software capable of decoding this mode (pretty much all of them!). This mode is what was commonly broadcast from the International Space Station.
Examples of suitable software you can use to decode the SSTV pictures include:
Any FM receiver (including handhelds) should be capable of receiving this payload, though as with the cross-band repeater, a Yagi antenna may be necessary for reliable reception at the edges of the transmitter footprint.
We’ve also setup a temporary 2m SSTV skimmer up at AREG’s remote HF receive site, which (if it works!) will post received images here: https://botsin.space/@aregsstv/tagged/PD120
We will have some digital certificates available for listeners that submit an image from the highest 1km of the flight (to be determined after the flight has finished). Email your images to vi25areg@areg.org.au !
Wenet Imagery – 443.500 MHz
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a Linux computer, a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
This payload will be trialing a PiCamera HQ, with a much larger lens. This will hopefully give us much higher quality imagery than we’ve seen previously, so long as we don’t hit focus drift issues like we have seen on previous flights.
Please note the transmit frequency of 443.5 MHz, which may require listeners to re-configure their Wenet setup. Listeners who are already setup to receive Wenet should consider updating their decoding software to the latest version (Due to be released at the beginning of August 2023), with update instructions available here.
Calling all contesters – help the Oceania DX Contest celebrate it’s 75th year!
First established in 1934 and earlier known as the VK/ZL contest, the Oceania DX Contest continues to grow. Please join us here in Oceania from all over the world for the 75th running of our international HF radio activity over the first two weekends of October.
PHONE: 06:00 UTC Saturday 3rd Oct to 06:00 UTC Sunday 4th Oct 2020
CW: 06:00 UTC Saturday 10th Oct to 06:00 UTC Sunday 11th Oct 2020
The Amateur Radio Experimenters Group will be running again this year as VK5ARG in a Multi-Multi entry in the PHONE contest this weekend. Our station is a large portable effort, constructed over the past 2 weeks at our remote contesting site (~100km north of Adelaide , the capital city of VK5). We would love to get you in our logs and will be looking for contacts on all bands from 160m to 10m.
Members who have never contested before and those that just like to come for the view and to socialize are asked to let the president know you are coming for catering purposes. We will then let you know the protocols for accessing the site (which is locked away on remote farmland). If you want to operate the station, please make sure you have registered with Matt VK5ZM who is coordinating the roster.
More Reasons to Join In!
The OCDX Committee have advised that there are a number of new plaques on offer this year thanks to their generous sponsors. Here are the new ones available for 2020:
Ron Wright ZL1AMO Memorial Award:
WORLD (non-Oceania) Phone + CW Single-Op Plaque
OCEANIA Phone MM (Multiple-Operators and Multiple-Transmitters) Plaque
OCEANIA SOUTHEAST ASIA Phone Single-Op Plaque (Philippines, East Malaysia, Brunei Darussalam, and East Timor)
AUSTRALIA Phone Single-Op YL Plaque
AUSTRALIA CW Single-Op All Band QRP Plaque
INDONESIA Phone Single-Op 40M Plaque for Advanced and Extra Class licensees
Everyone is encouraged to have a go and submit a log, even if you only make one or two QSOs, so the contest organisers can verify these QSOs when calculating the final scores for all entrants. Upload your log via http://www.oceaniadxcontest.com/html/enter.html .




































































 Calling all contesters – help the Oceania DX Contest celebrate it’s 75th year!
Calling all contesters – help the Oceania DX Contest celebrate it’s 75th year!")
")
")
{kind=link}