
Horus 55 was the culmination of something that had been discussed for many years within the Project Horus team – Live video from a high-altitude balloon. The technical challenges in doing this are many, from designing a transmitter system that provides enough signal without melting in the thin atmosphere at high altitudes, to building a high performance receive system that can capture that signal, and then upload it to the internet for everyone to enjoy. (After all, if it didn’t get live-streamed, did it really happen?)
At 10:30AM on the 7th of March 2021, all of this came to fruition with the first flight of the Project Horus DVB-S payload.
The Payloads: DVB-S Transmitter

The DVB-S payload was the primary experiment on this flight, and had been in development by Mark VK5QI and Peter VK5KX over the last 12 months. The payload utilised a Raspberry Pi Zero W to capture and compress video (using F5OEO‘s DVB-S encoder and natsfr’s LimeSDR Gateware – this project would not have been possible without their work – thanks!), which was then modulated as a 70cm (445MHz) DVB-S transmission using a LimeSDR Mini. The signal was amplified to ~800mW using a LDMOS-based power amplifier. The overall power dissipation in the payload was ~6 watts, so a heat-spreading and heat-sinking system was built by Peter, including custom-milled interface plates for the LimeSDR.
The payload was powered from 8x Energizer Lithium AA primary cells, which are well-regarded for their low-temperature performance.
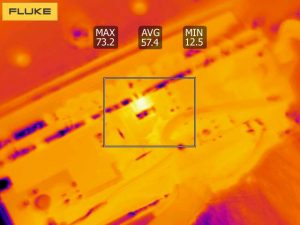
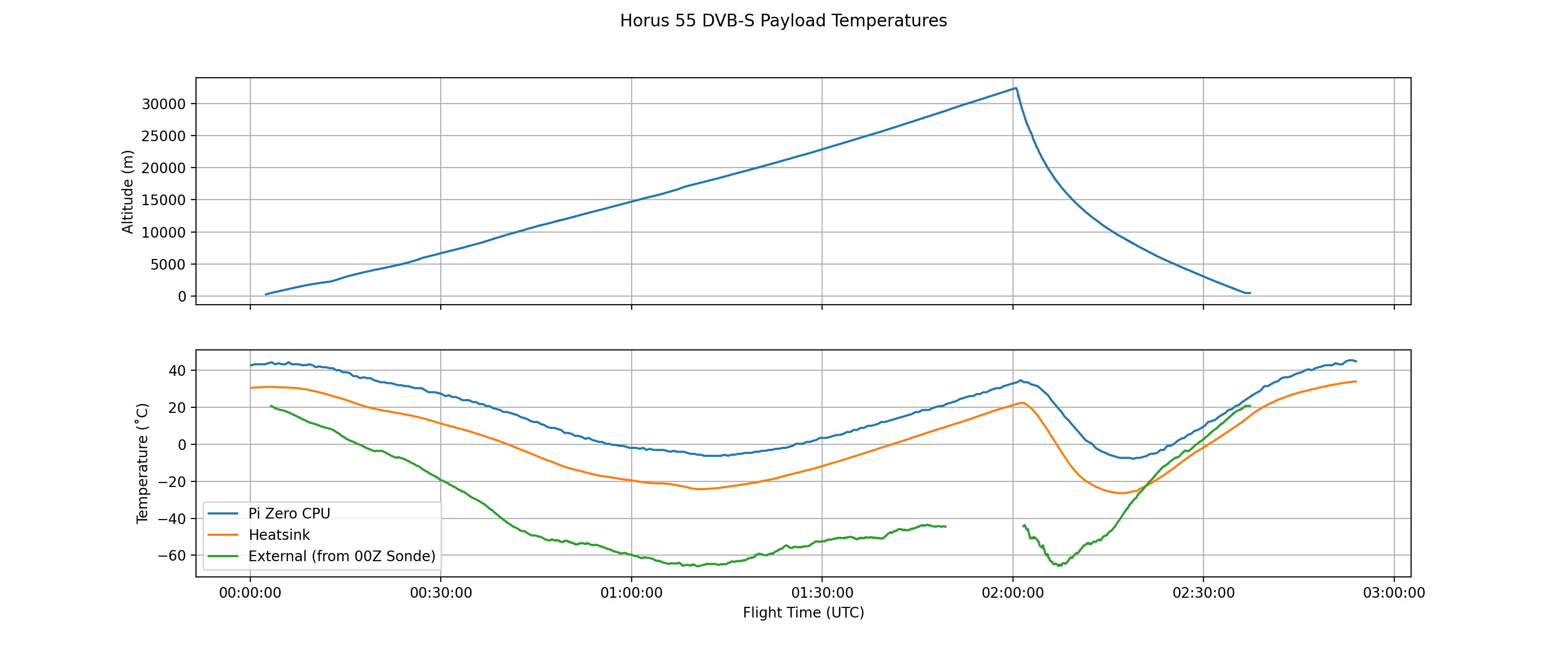
Much testing and tuning of the payload was performed in the lead-up to the launch, including monitoring of the temperatures within the payload when sitting in full-sun, to ensure it would not reach dangerous temperatures.
Mark VK5QI gave a presentation on the payload at the AREG February meeting, which is available here:
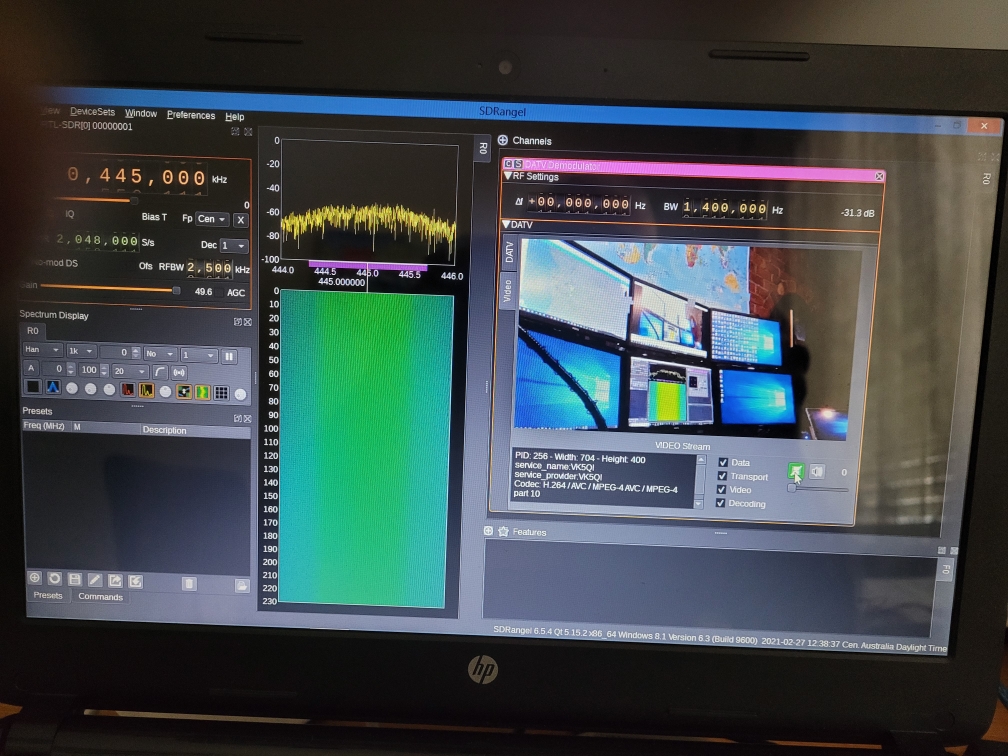
The final DVB-S parameters used on the flight were:
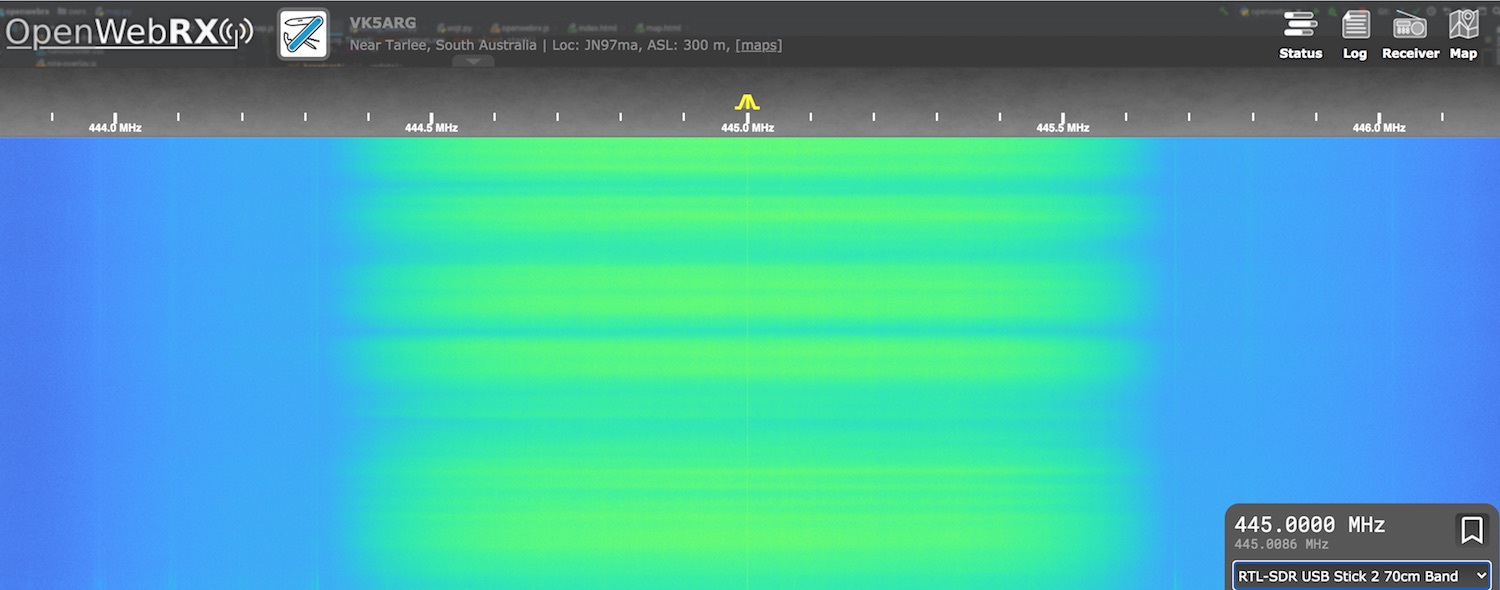
- Frequency: 445.0 MHz
- Mode: DVB-S
- Modulation: QPSK, 1 Msps
- Forward-Error-Correction: r=1/2
- Video Resolution: 720 x 404
The Payloads: LoRaWAN Beacon
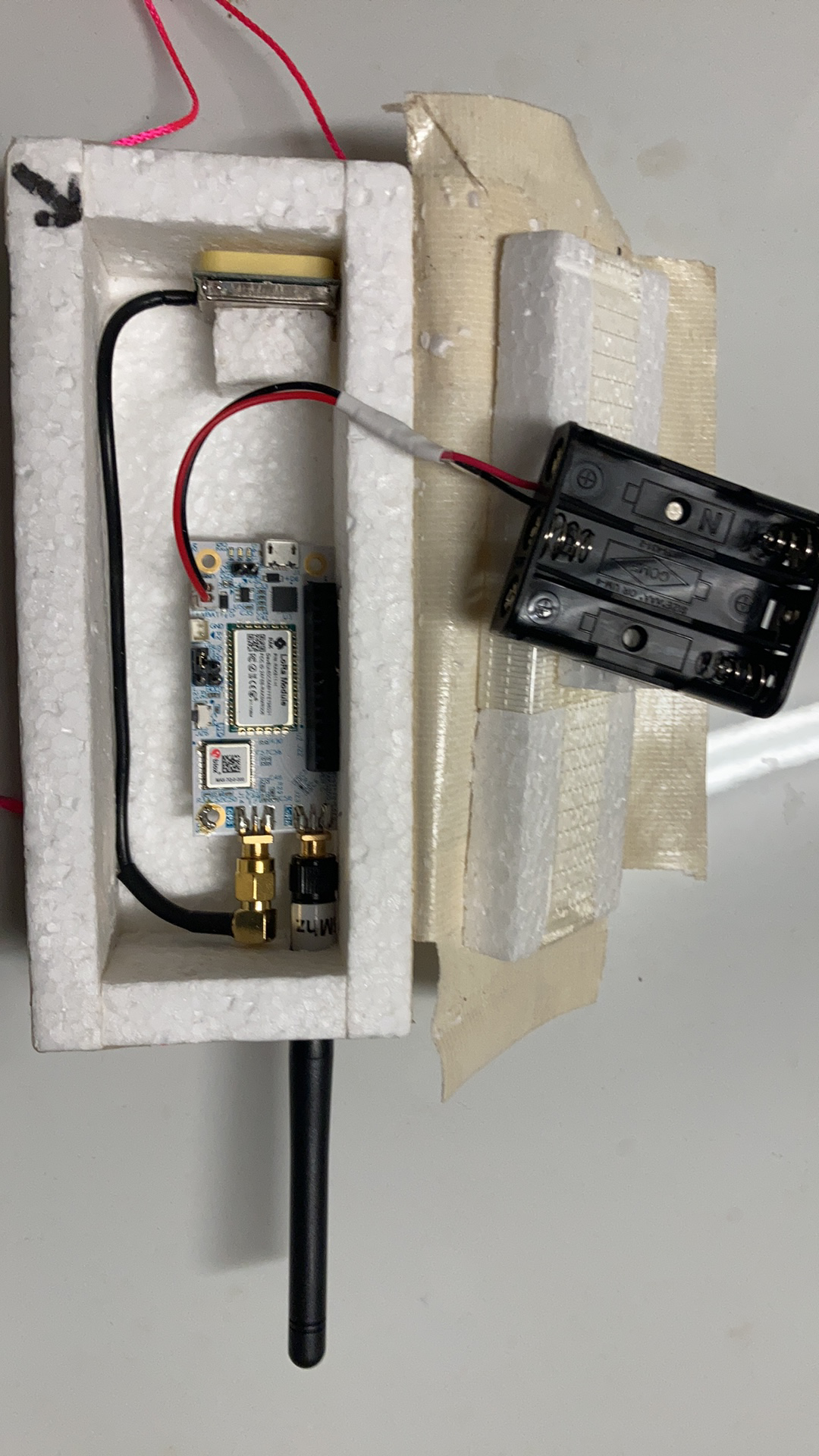 Also on this flight was an experimental LoRaWAN tracking payload built by Liam VK5LJG. The aim was to transmit position beacons into ‘The Things Network‘ (‘TTN’), which has gateways (receiver stations) in many locations across Australia.
Also on this flight was an experimental LoRaWAN tracking payload built by Liam VK5LJG. The aim was to transmit position beacons into ‘The Things Network‘ (‘TTN’), which has gateways (receiver stations) in many locations across Australia.
The payload operated on the 915-928 MHz LIPD band, with a transmit power of ~50mW. The hardware was a RAK Wireless RAK5205 board, running custom firmware for the flight. Position updates were only sent every ~3 minutes to comply with TTN fair-usage guidelines.
We expected that this would be received by TTN gateways all around the Adelaide area… it actually performed much better than expected!
The Payloads: Tracking & Flight Management
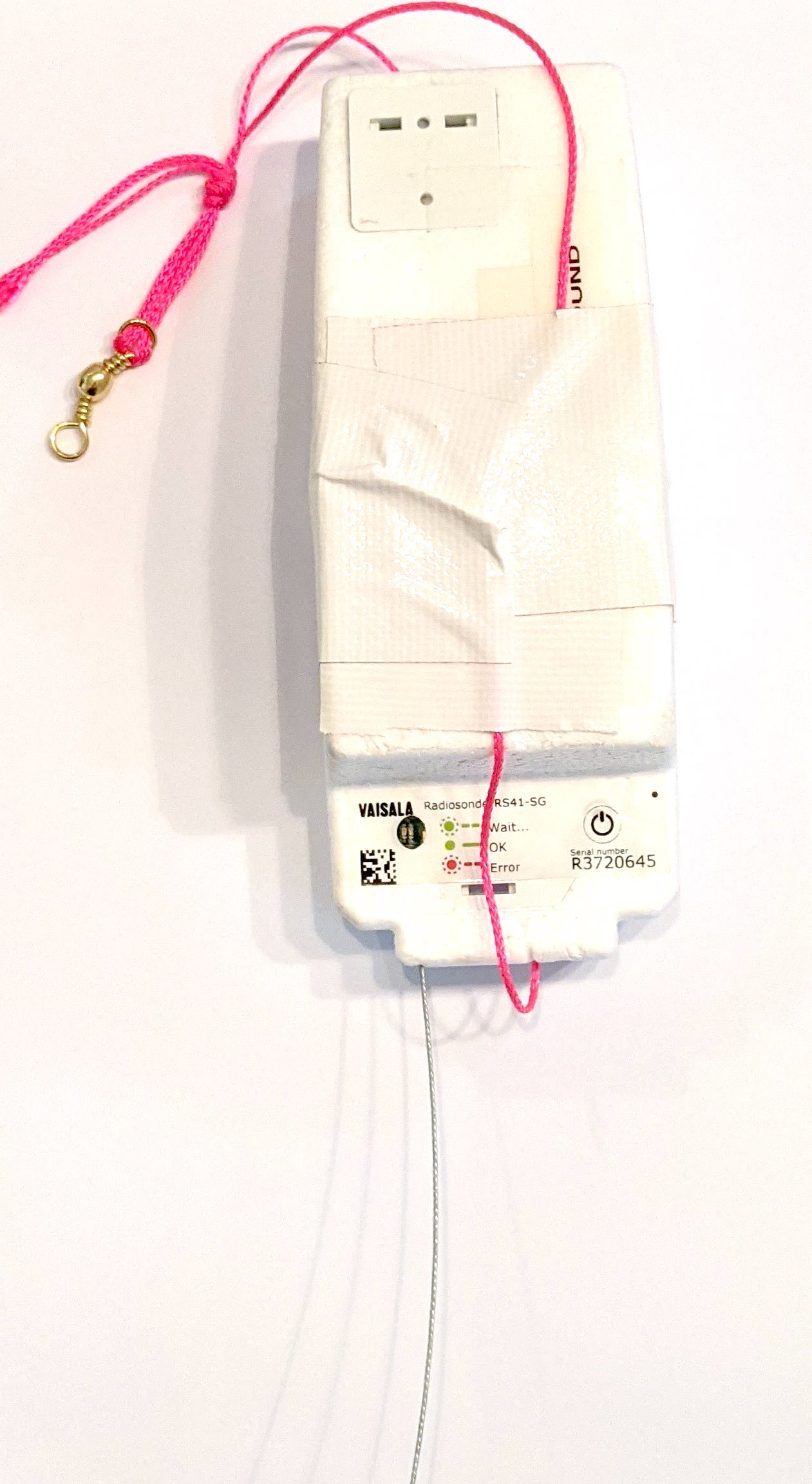
The flight also included the usual complement of telemetry and flight management payloads. Primary telemetry was provided by a reprogrammed RS41, transmitting the ‘Horus Binary‘ 4FSK mode on 434.200 MHz. This was received by a large number of amateur stations running the ‘Horus-GUI’ demodulation software. Tracking of the payload was available on the HabHub tracker online, allowing global access to the position of the balloon throughout the flight.
The separate flight management payload was a LoRa-based payload operating in the 70cm (430.0MHz) amateur band. This payload allows remote termination of the flight if necessary (and it was actually used in anger this flight!).
Flight Preparation & Receiver Testing
 On the weekend prior to the launch, two test-and-tune events were conducted, where receiving stations around the Adelaide area had the opportunity to configure and test the software and hardware necessary to receive the DVB-S signals. Transmissions were conducted from Steve VK5SFA’s QTH on Saturday, and from Black-Top Hill on Sunday. Both sites provided excellent line-of-sight to the Adelaide metropolitan are, enabling eight stations to be able to receive the test transmissions ready for the live balloon flight the following weekend.
On the weekend prior to the launch, two test-and-tune events were conducted, where receiving stations around the Adelaide area had the opportunity to configure and test the software and hardware necessary to receive the DVB-S signals. Transmissions were conducted from Steve VK5SFA’s QTH on Saturday, and from Black-Top Hill on Sunday. Both sites provided excellent line-of-sight to the Adelaide metropolitan are, enabling eight stations to be able to receive the test transmissions ready for the live balloon flight the following weekend.
 Finally, a full systems check was conducted with Peter VK5KX. The test covered all of the equipment which would comprise the primary ground-station for the flight, receiving video from the payload and streaming it live to Youtube. This involved testing of the 2 x 18-element Yagi-Uda array, and all the receiver and streaming software. A big thanks to Hayden VK7HH for helping get the Youtube streaming working via his HamRadioDX channel.
Finally, a full systems check was conducted with Peter VK5KX. The test covered all of the equipment which would comprise the primary ground-station for the flight, receiving video from the payload and streaming it live to Youtube. This involved testing of the 2 x 18-element Yagi-Uda array, and all the receiver and streaming software. A big thanks to Hayden VK7HH for helping get the Youtube streaming working via his HamRadioDX channel.
Launch!
The ground station crew, chase teams, and spectators started to assemble at the Auburn Oval launch site around 9AM, to find that showers had set in.
It was decided to continue on with launch preparations and wait for the showers to pass.
By a bit after 10AM the showers had died away to a light sprinkling, and the balloon filling was started. Around this time the live-stream from the launch site was switched on, with many viewers from around the world tuning in to watch the proceedings.
")
")


The balloon used for this flight was a Totex 1000g, and an entire 3.5m^3 cylinder of helium (donated by the University of Adelaide) was used to fill it. Using the fast-fill rig the fill was completed in a few minutes (as opposed to the almost 1 hour of slow-filling that used to be required), and the balloon was tied off ready for launch.
")
")
")
")
")
")
After a final check that all payloads were working as expected, the (short) countdown began, and the balloon and payloads were released!
Ascent & Live Video!
After launch the ground-station system was switched into ‘auto tracking’ mode, and began pointing the high-gain Yagi antennas to follow the balloon and payloads. This ensured the best quality video reception, and it definitely worked!
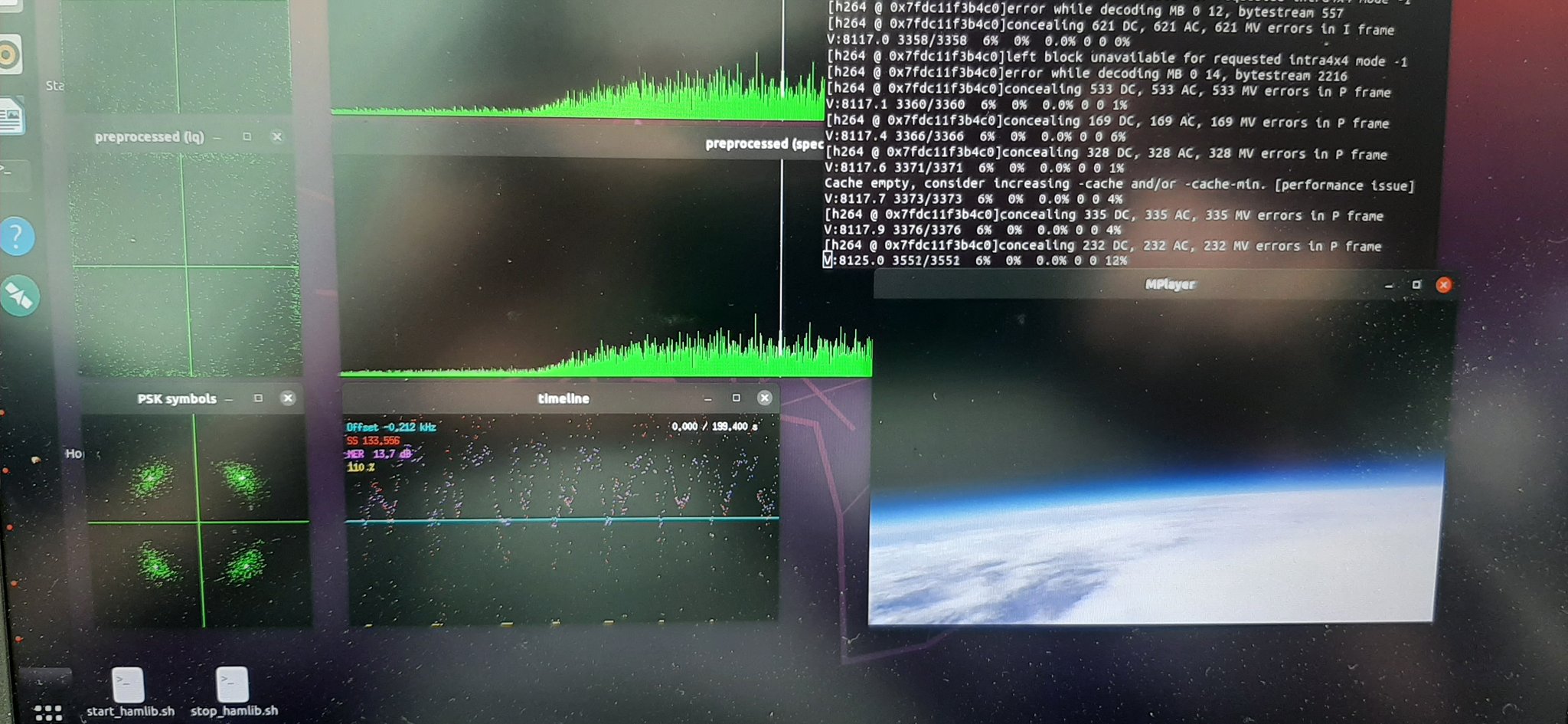
 Viewers at the launch site and all around the world via Youtube were treated to clear visuals relayed from the primary ground station as the balloon ascended up to cloud-base. Reports from other receiving stations around the region started trickling in, with Ian VK5ZD (near Kapunda) and Joe VK5EI (Adelaide) being the first to report in.
Viewers at the launch site and all around the world via Youtube were treated to clear visuals relayed from the primary ground station as the balloon ascended up to cloud-base. Reports from other receiving stations around the region started trickling in, with Ian VK5ZD (near Kapunda) and Joe VK5EI (Adelaide) being the first to report in.
As the balloon reached the first cloud layer the views of the surrounding landscape was replaced with grey, and the chase teams took this as a sign that it was time to head off towards the expected landing area. Meanwhile the ground control team of Matt VK5ZM, Pete VK5KX and Grant VK5GR kept watch on the balloon state and the TV signal being relayed to YouTube and being broadcast around the globe.


The ground-station team continue to keep tracking the payload, uploading live video to over 200 viewers on Youtube. A big thanks to Hayden VK7HH for hosting the live stream on his Youtube channel, and helping answer the many questions that were asked by the viewers throughout the flight. Please make sure to Like and Subscribe his Youtube channel!
One of the last shots received before the balloon was cut away so the payloads could land
Chase, Cutdown & Recovery
 This flight had four chase teams:
This flight had four chase teams:
- Mark VK5QI and Will VK5AHV
- Darin VK5IX, along with Cameron and Dan
- Liam VK5LJG
- Gerard VK5ZQV
All the teams headed off in convoy towards Eudunda as their first stop, where the traditional bakery visit was made mid-flight instead of after recovery.
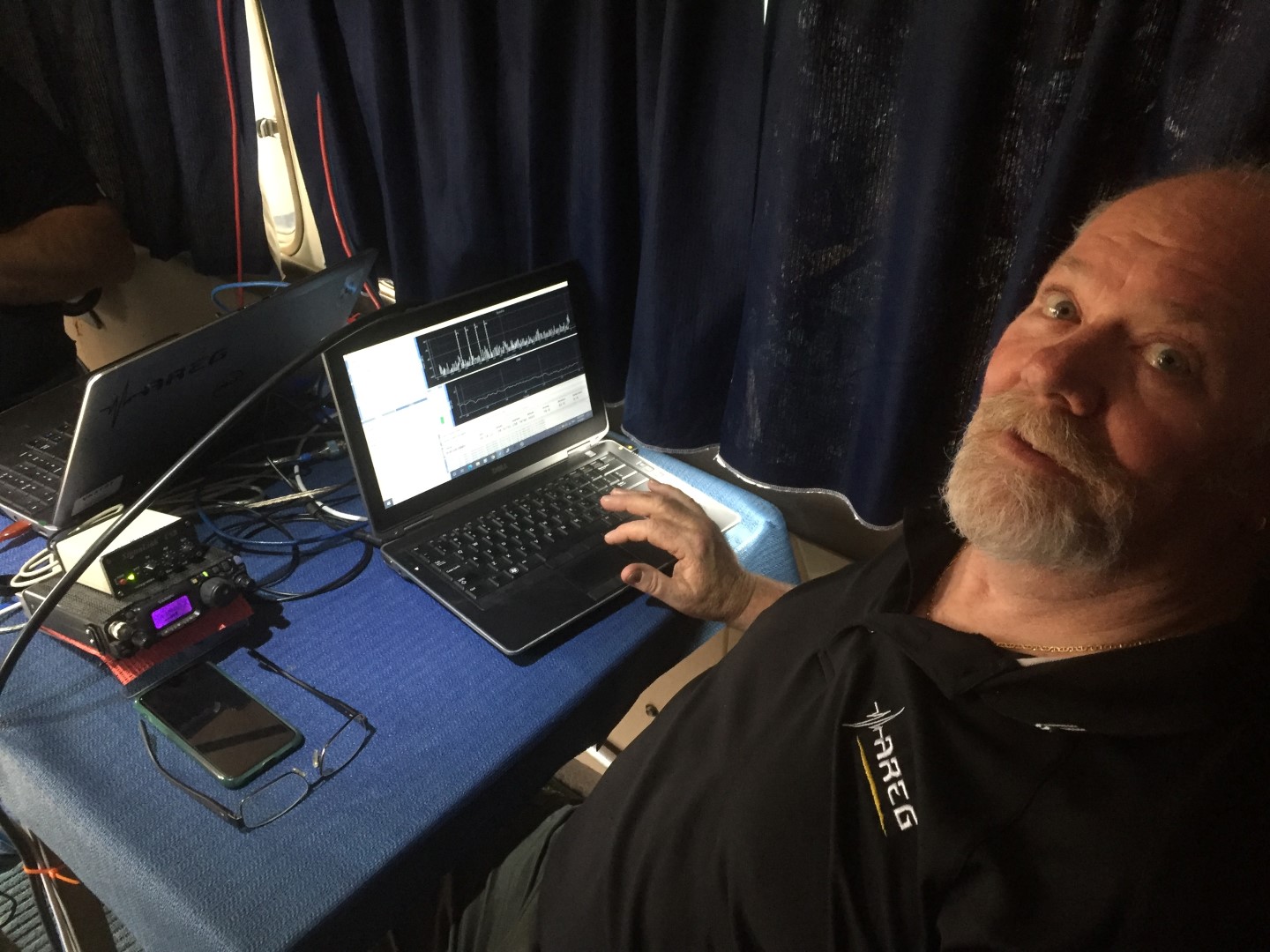
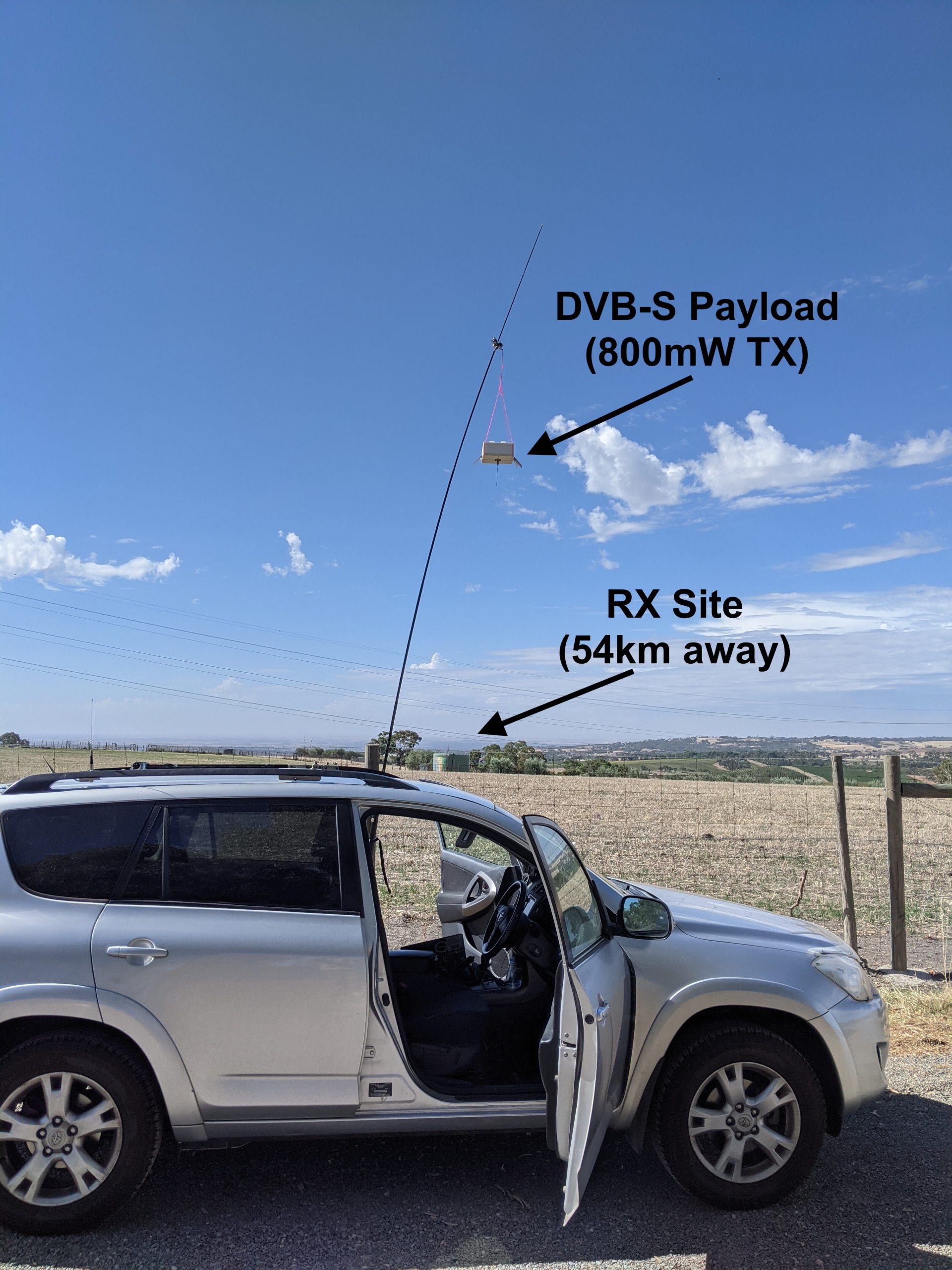
 Mark and Will were receiving the video from the DVB-S payload in the car, which worked surprisingly well even with the fairly modest antenna setup on Mark’s car (an upward-fading turnstile).
Mark and Will were receiving the video from the DVB-S payload in the car, which worked surprisingly well even with the fairly modest antenna setup on Mark’s car (an upward-fading turnstile).
After a quick lunch, the teams headed south towards the predicted landing area. As the flight processed and the balloon rose past the expected burst altitude of 30km, Mark made the call to terminate the flight to help land the payloads in an easily recoverable area. A few radio commands later, the payloads started falling, with the cut-down event observed via the video link (though the fast tumbling did result in a lot of broken video). The maximum altitude achieved was 32379m above sea level.
The teams headed towards the new predicted landing location, and after a bit of back-and-forth were able to be in position to watch the payloads land under parachute. Unfortunately the payloads were just a bit too far away for the teams to get imagery of the final descent.
After getting permission from the landowners (thanks!), the teams were able to enter the property and drive almost right up to where the payloads had landed.
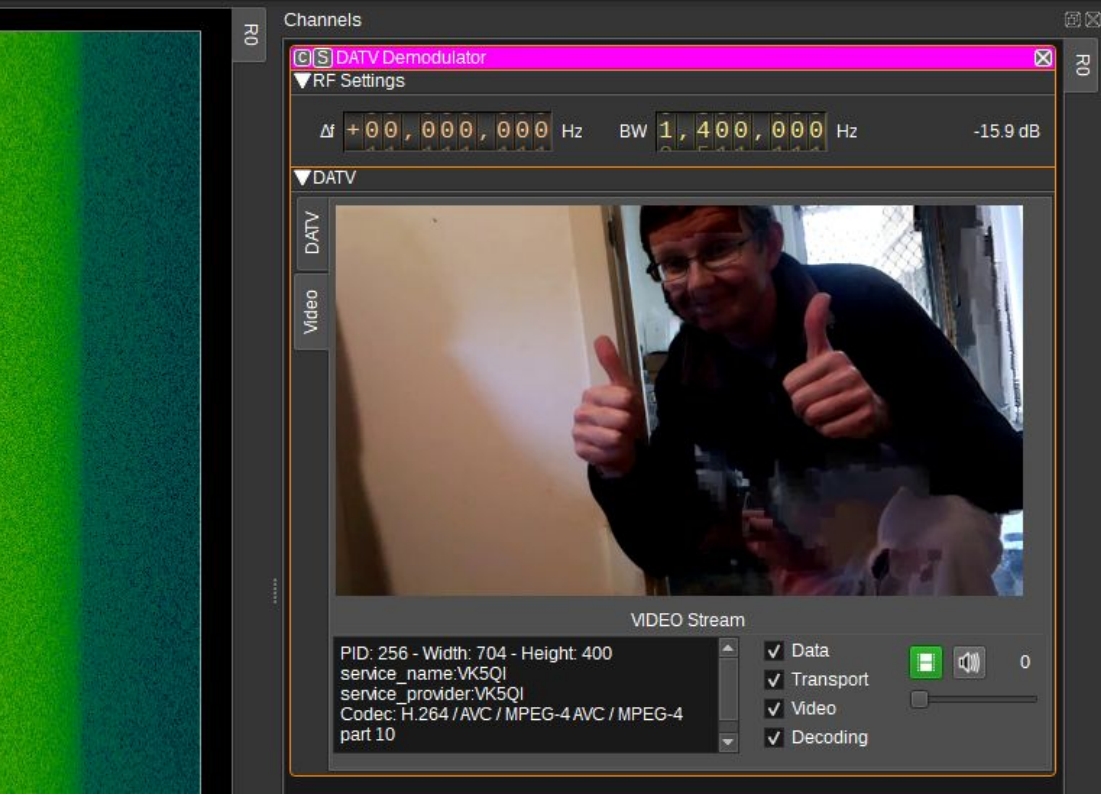
 While a bit bent and dented (and upside-down!), the DVB-S payload continued to transmit video after landing, with the receiver in Mark’s car capturing the team walking up and recovering the payload.
While a bit bent and dented (and upside-down!), the DVB-S payload continued to transmit video after landing, with the receiver in Mark’s car capturing the team walking up and recovering the payload.

Analysis of log files from the payload showed that overheating was certainly not an issue – instead the heat-spreader plate within the payload reached a chilly -27˚C during the descent phase of the flight!
DVB-S Reception Reports
So far the following stations have reported being able to receive video from the DVB-S payload:
- Bill VK5DSP – Middleton, SA
- Iain VK5ZD – Kapunda, SA
- Joe VK5EI – West Lakes, SA
- Berndt VK5ABN – Nairne, SA
- Andrew (N0CALL), Pt Noarlunga, SA
- Steve VK5MSD – Whyalla, SA
- Roger VK5YYY – Whyalla, SA
- Gerard VK5ZQV – Mobile, during the chase.
If you received video from this flight, let us know!
The longest distance the payload was received from was by the stations in Whyalla, at almost 190 km range, followed by Bill in Middleton, at 145km range. The payload designers are absolutely ecstatic at how many stations were able to receive video during this flight – hopefully we can repeat this success on more flights in the future!
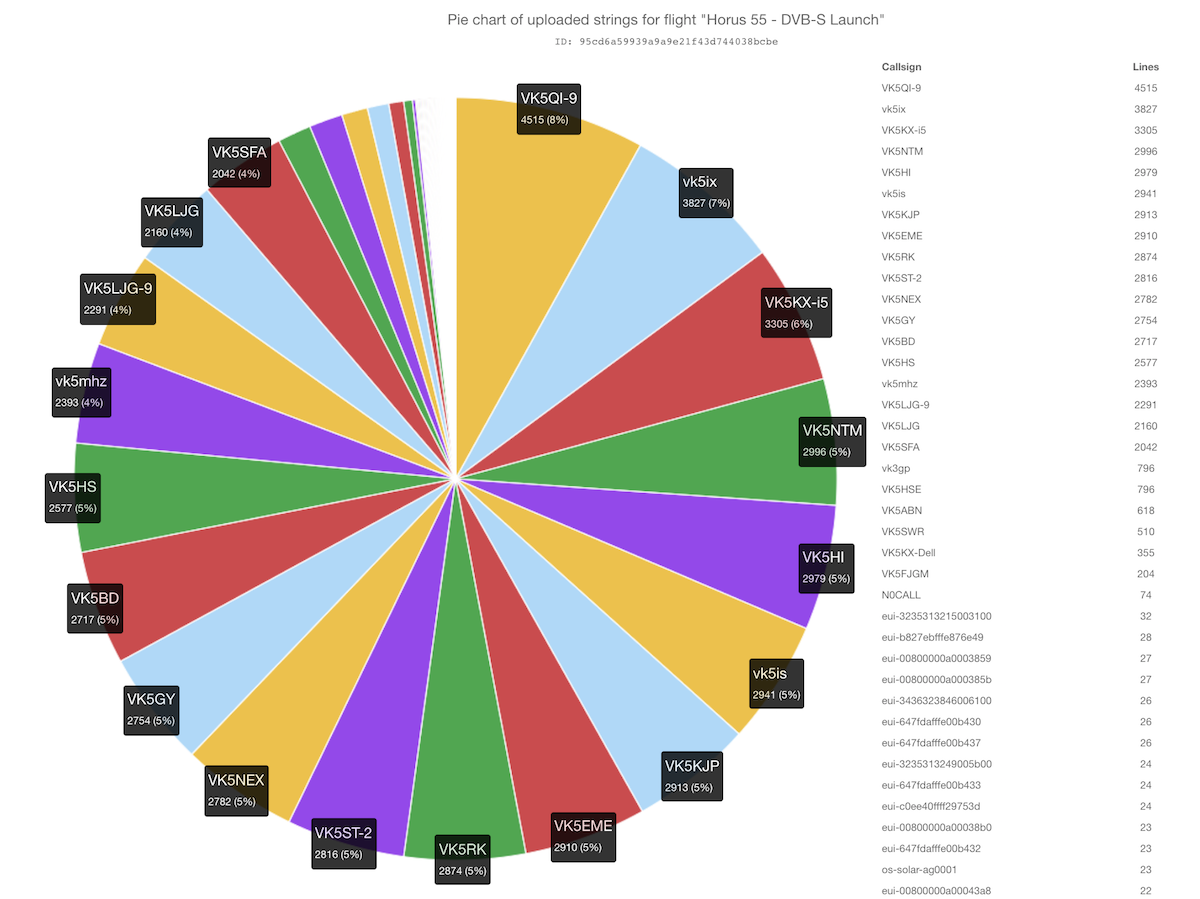
Horus Binary (4FSK) Telemetry Reception Statistics
With every Project Horus flight we like to thank all the receivers that helped receive telemetry from the flight. All the telemetry you receive and upload to the net helps keep the tracking map up-to-date throughout the flight, and serves as a backup in the case of ground-station or chase-car receiver failure. On this flight telemetry was recorded from as far away as Horsham, though there were reports of telemetry reception in Melbourne – however it appears these stations did not upload their telemetry to the internet.
| Callsign | Received Packets | Percentage of Flight Received | First-Received Altitude (m) | Last-Received Altitude (m) |
|---|---|---|---|---|
| VK5ABN | 399 | 20.1% | 8138 | 1585 |
| VK5BD | 1748 | 88.2% | 1070 | 2142 |
| VK5EME | 1871 | 94.4% | 679 | 1599 |
| VK5FJGM | 121 | 6.1% | 11592 | 3349 |
| VK5GY | 1771 | 89.4% | 927 | 2975 |
| VK5HI | 1919 | 96.8% | 549 | 1278 |
| VK5HS | 1659 | 83.7% | 4142 | 1702 |
| VK5HSE | 507 | 25.6% | 28528 | 987 |
| VK5KJP | 1874 | 94.6% | 699 | 658 |
| VK5KX-i5 | 1878 | 94.8% | 306 | 1013 |
| VK5LJG (Home) | 1381 | 69.7% | 2946 | 3156 |
| VK5LJG-9 | 965 | 48.7% | 306 | 4916 |
| VK5NEX | 1798 | 90.7% | 801 | 1637 |
| VK5NTM | 1930 | 97.4% | 886 | 498 |
| VK5QI-9 | 1799 | 90.8% | 306 | 498 |
| VK5RK | 1853 | 93.5% | 1214 | 825 |
| VK5SFA | 1311 | 66.1% | 631 | 2131 |
| VK5ST-2 | 1829 | 92.3% | 556 | 670 |
| VK5SWR | 330 | 16.6% | 11309 | 18461 |
| VK3GP | 509 | 25.7% | 19672 | 13866 |
| VK5IS | 1893 | 95.5% | 579 | 1026 |
| VK5IX-9 | 1913 | 96.5% | 306 | 498 |
| VK5MHZ | 1533 | 77.3% | 4583 | 2741 |
LoRaWAN Experiment Results
![]() As mentioned earlier, the LoRaWAN payload was transmitting telemetry packets to be received by The Things Network gateways. We expected the payload to be received by stations in the general Adelaide area, however it turned out that at the peak of the flight we were received by gateways as far away as Ballarat, Victoria! Full details on what gateways received each packet are available here.
As mentioned earlier, the LoRaWAN payload was transmitting telemetry packets to be received by The Things Network gateways. We expected the payload to be received by stations in the general Adelaide area, however it turned out that at the peak of the flight we were received by gateways as far away as Ballarat, Victoria! Full details on what gateways received each packet are available here.
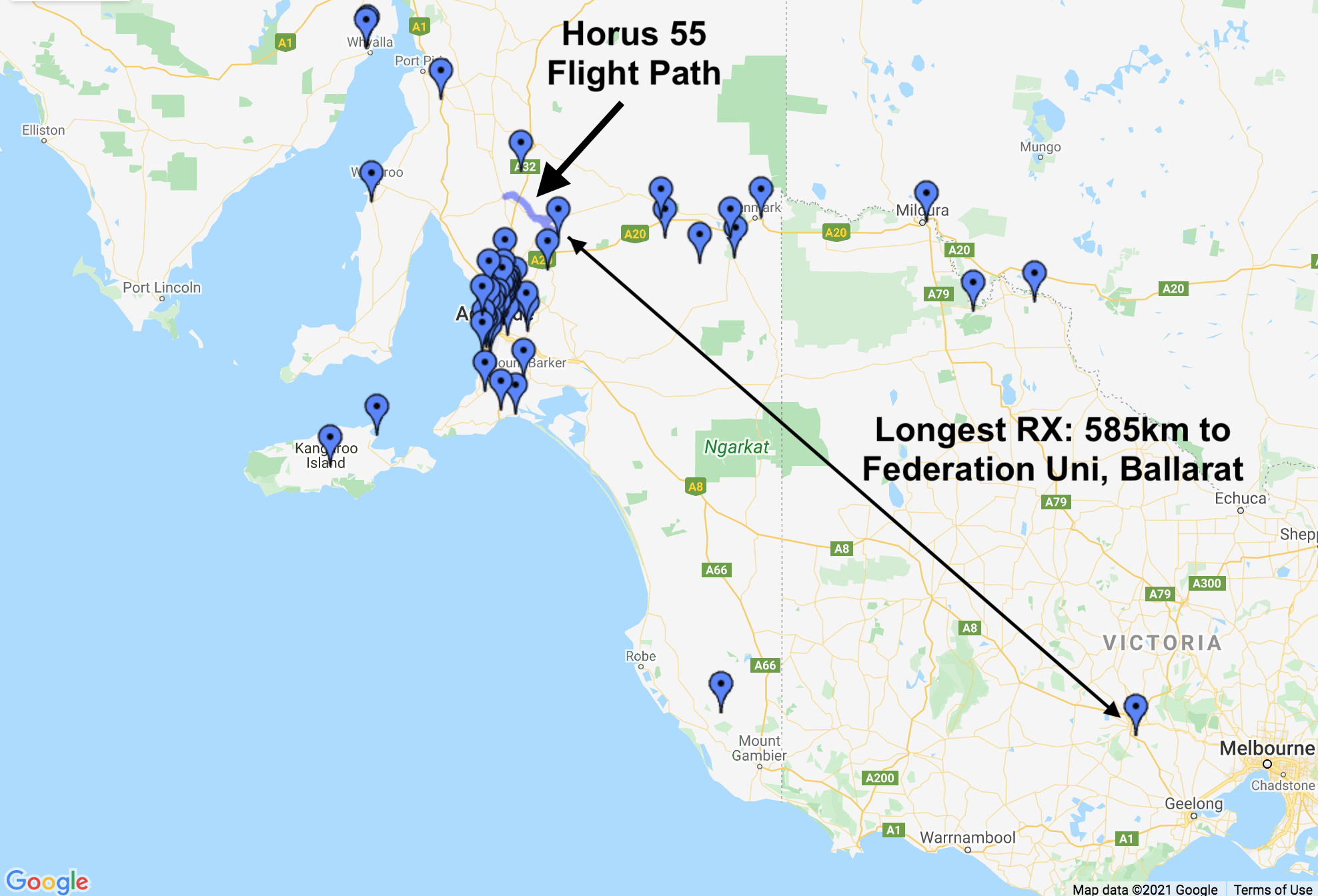
The longest path was 585km, which for a ~50mW transmitter at 923 MHz is quite an achievement! The world record distance for this system is 823km, and we’re interested to see if we can beat this on a future launch!
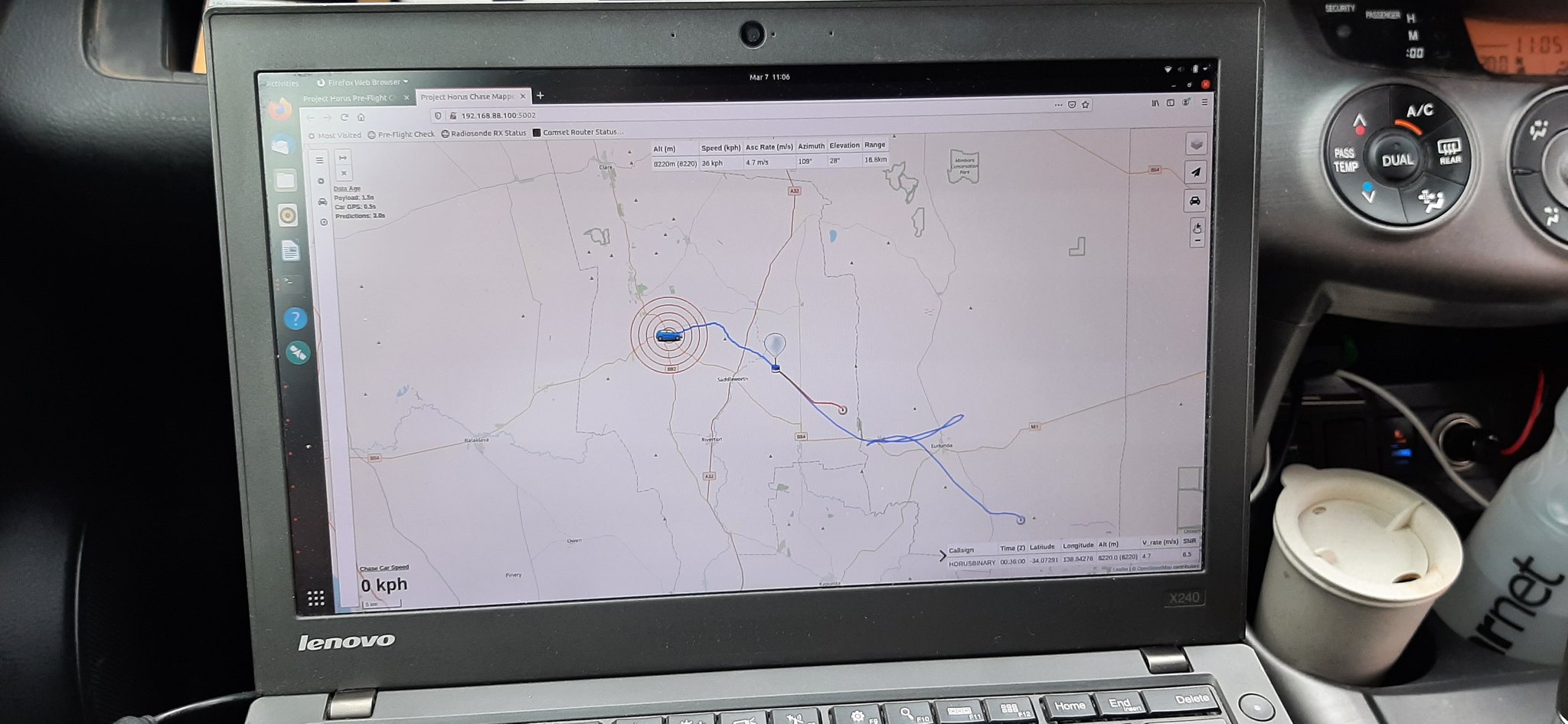
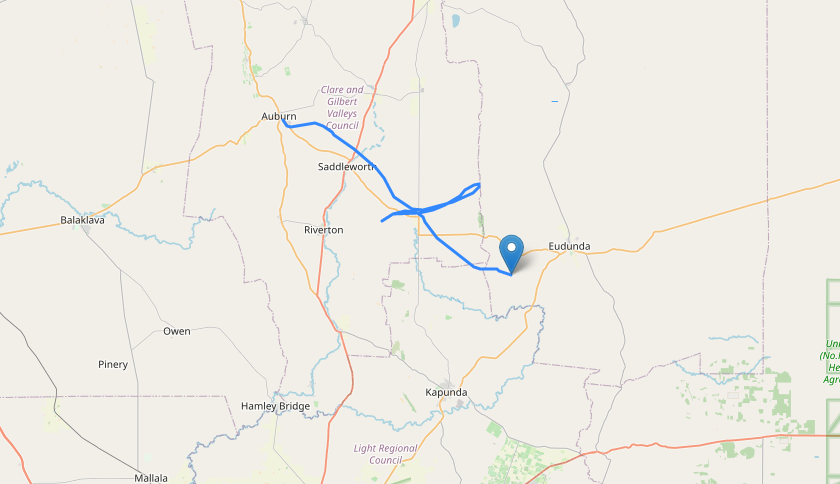
Flight Track
At the conclusion of the flight we were also able the telemetry into this flight profile, which gives an appreciation of the journey the balloon and the experimental TV transmitter under took.

Conclusion & Future Flights
Horus 55 - Flight Statistics
| Metric | Result |
|---|---|
| Flight Designation: | Horus 55 |
| Launch Date: | 2021-03-07 00:02Z |
| Landing Date: | 2021-03-07 02:37Z |
| Flight Duration: | ~2.5 hours |
| Launch Site: | -34.02932,138.69124 |
| Landing Site: | -34.25959,139.11443 |
| Distance Traveled: | 46 km |
| Maximum Altitude: | 32,379 m |
With the huge success of this flight, the team plans to follow this up with more video flights in the future. There are many lessons to be learnt from this flight, and many improvements that can be made to both the payload, the ground-station, and the live-streaming systems. Viewers can look forward to higher quality video, more running commentary, and hopefully live video from the chase-cars as they recover the payloads.
The next few months will be getting busy for the Amateur Radio Experimenters Group, with the upcoming Riverland Paddling Marathon taking up a lot of club members time. Expect the next full-scale flight sometime in late June – weather permitting!
 It is late and we are still processing telemetry and video streams but we thought we would post a quick note to say that Horus 55 was an absolute success. Stories are coming in from across the region from people who successfully watched the Amateur TV signal live over 80-90km away.
It is late and we are still processing telemetry and video streams but we thought we would post a quick note to say that Horus 55 was an absolute success. Stories are coming in from across the region from people who successfully watched the Amateur TV signal live over 80-90km away.







")
