The next meeting of the Amateur Radio Experimenters Group Inc will be held on Friday October 17th at 7.30pm. Doors will open at 7.00pm. The venue will be the Fulham Community Centre, Phelps Court, Fulham.
Introducing Digital Amateur Television
The topic this evening will be an introduction to 445 MHz (70 cm band) Digital Amateur Television, presented by Steve VK5SFA. Steve will present his journey to establishing an ATV transmission capability, including the various challenges encountered along the way.
Steve will also discuss how to get involved in receiving ATV on the 70cm band, and if you bring along your DVB-T set top box he will help you leave with it programmed ready to receive the local Adelaide ATV operators. The usual retailers are still selling the Laser STB-9000 for about $40.00 which will directly receive 70cm ATV if you want to get on board.
Update: a copy of the Youtube presentation is now available here:
Homework
Below is a list of terms used in DVB-t2 television broadcasting. I will not be going into any great detail about how DVB-t2 actually works. It is a mature technology and there is plenty of information on the Internet.
Feel free to conduct your own research if interested.
DVB-t (Digital Video Broadcasting – Terrestrial)
Coded Orthogonal Frequency Division Multiplexing (COFDM)
The next meeting of the Amateur Radio Experimenters Group will be held on Friday 19th September 2025. The venue is the Fulham Community Centre, off Phelps Court, Fulham. Doors open at 6.30pm and the meeting starts at 7.30pm.
The presentation this month will be given by Mark, VK5QI and Grant VK5GR who will take everyone through what happens at the National Amateur Radio Foxhunting Championships, held in Mt Gambier over the June long weekend each year.
Tea/Coffee and refreshments will be available. After the presentation a short business meeting will be held.
We hope to see you there (at the ex Reedbeds Community Centre – now Fulham Community Centre).
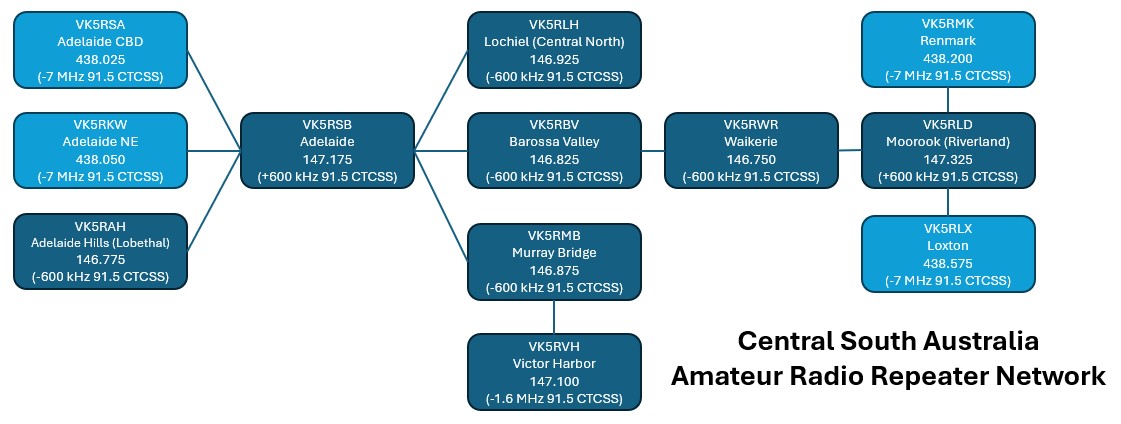
Many amateurs in central SA today make use of the central state 2m/70cm band repeater network that covers from Victor Harbor to the Riverland, and Adelaide to the Central North. Unfortunately, due to the loss of the central VK5RAD repeater hub site, a major rearrangement of the repeater network needs to be undertaken. The Amateur Radio Experimenters Group has offered to host the 70cm network hub (formerly operating at VK5RAD) at their Summertown repeater site to keep the network operational. However, to establish VK5RSB as the new hub, there will be some disruption to operations as link frequencies are changed and equipment is relocated.
Final hub equipment installation work is planned to take place starting August 23rd. That will include deploying a new repeater control system & hub repeater at the AREG VK5RSB repeater site.
What does this mean for users?
The key change Adelaide amateur radio operators will see is that, rather than accessing the network via the old 439.925 MHz 70cm repeater at VK5RAD, they instead will need to use the recently commissioned 147.175 MHz (+600 kHz) (91.5 Hz CTCSS) repeater at Summertown (VK5RSB).
For those still looking for 70cm band access, the AREG VK5RSA Adelaide CBD repeater, (sponsored by Kern Wi-Fi) on 438.025 MHz (-7 MHz) or the VK5RKW Adelaide NE repeater on 438.050 MHz will continue to be available.
How long will the full migration take?
Once the new central hub is installed, one by one, each of the network links will be migrated. This will result in the network being fragmented (part working on the new backbone, part working on the old one) for 1-2 weeks, while we travel all of the linked sites to make the necessary frequency and control changes. We hope to have all of the network migrated to the new hub no later than the 6th of September.
As you can appreciate, this move will take time. The affected repeaters in the network are VK5RSA, VK5RKW, VK5RAH, VK5RMB, VK5RVH, VK5RBV, VK5RWR, VK5RLD, VK5RLX, VK5RMK, VK5RLH as well as VK5RSB which will be introduced into the system.
We will post updates as each of the links is moved. Meanwhile, thank you for your patience.
AREG is pleased to announce that we have finally completed the long planned 2m repeater project at our Summertown repeater site. This now completes the full set of repeaters for all amateur bands from 6 m (53 MHz) to 23 cm(1273MHz).
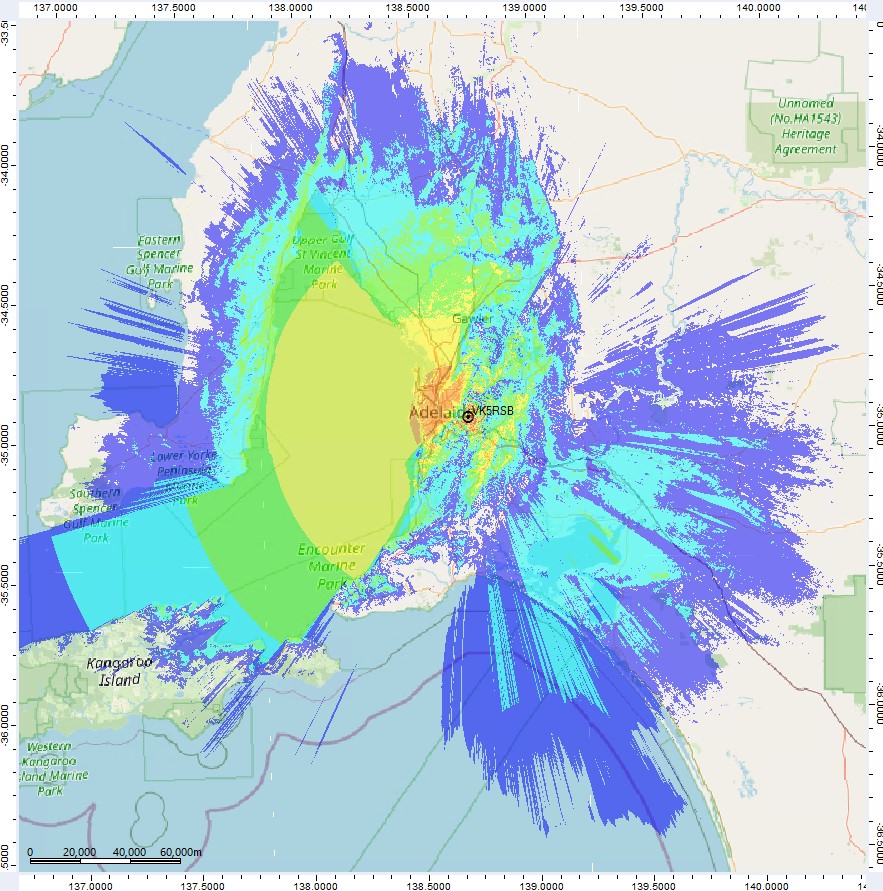
The new repeater, which operates on 147.175 MHz (+600 kHz) and has been on test for a number of weeks, received its final antenna over the weekend. The antenna was also relocated to the top of the tower. So far, signal reports have been excellent right across Adelaide and the greater central South Australian region. We are getting great signal reports from mobiles and hand held operators alike all over Adelaide, including the southern suburbs (Christies Beach), Eastern foothills (Rostrevor/Newton) and the Northern hills face suburbs (like Hillbank) as well as further afield from Murray Bridge, Normanville, Renmark and Port Lincoln.
Operating via VK5RSB 2m
Stations using the repeater should be aware that the system is set up a little differently to other Adelaide repeaters. When you access the repeater, you will hear a courtesy beep 1 second after the end of your transmission, (which signals that the 5 minute time out timer has been reset), followed by the repeater tail transmitting for a further 4 seconds. During the remaining 4 seconds, you are free to key your transmitter and continue your conversation without waiting for the repeater transmitter to shut down. This reduces the “crash bang” squelch break noise you might be used to on other systems.
To access the system you do need CTCSS transmit capability. The repeater responds to a 91.5 Hz sub-tone for activation.
VK5RSB 2m Predicted Coverage
If you would like to send us a signal report, please email vk5arg @ areg.org.au. We would love to hear from you!
Our other repeaters at VK5RSB
If you would like to try some of the other bands, you will also find VK5RSB on:
53.750 MHz (-1 MHz offset)
439.900 MHz (-5 MHz offset) (with 91.5 Hz CTCSS)
1273.500 MHz (+20 MHz offset)
Future Plans
Future plans also include adding an APRS repeater on 145.175 MHz (AX.25) and connecting the VK5RSB 70cm repeater to the central SA repeater network as the replacement Adelaide network hub (given that the VK5RAD 70cm and APRS repeaters at Crafers are expected to cease operation when that site is closed in August 2025).
In this age of miniaturization it is amazing to consider what has been achieved with modern technology. With that thought in mind, a dedicated group of members within AREG has been exploring what could be done using the various models of Bluetooth connected earbud headphones that are currently available. Originally the thought was to see how they could help our fox hunting teams gain an advantage over the VK3 teams at the national championships, but then one of the team members made an amazing discovery. Hidden inside certain manufacturer’s products was a surprising amount of compute power, far more than would ordinarily be needed to convert a simple Bluetooth signal into audio.
On further probing and exploration, the team finally found a way to hack into the EarBud operating system and access the boot loaders. Now these operating systems and compute capabilities were completely unexpected, and so not only was this an eye opener, it was also a game changer as the team pondered just what might be possible! (It also posed the question, what on earth were the manufacturers planning in the future and why such compute capability was even required in these devices, but these are questions for later exploration).
Amateur Radio Applications?
Having opened up the operating system, the team made short work of learning how to load software into the earbuds, and then the creative juices started flowing. One of the early thoughts was whether there might be a way to connect one of the modern Bluetooth capable HF transceivers to these earbud systems. A quick look at the IC-705 from ICOM confirmed that this was simple enough to do.
The trick then was to see what the earbuds could do!
Morse Code – Music to your ears – with Speech Conversion technology!
The first simplest idea was to simply relay CW signals to your ears. The challenge however wasn’t to just relay the raw audio. Given the amount of compute power discovered in these ear buds it became clear much more could be done. The team then built a CW decoder and speech encoding routine that could take a HF signal straight from a Bluetooth transceiver and turn it into synthesized speech. The achieved results were impressive indeed.
CW Input Signal
Earbud Processed CW to Speech
Further work was then undertaken to work on the decoder’s ability to separate out individual signals in a pileup. After some experimental AI routines there was success! Morse Code finally entered the digital age!
Digital Operators delighted by FT8 success
Following on from the CW experiments, the FT8 devotees in the club got together to see if it would be possible to port the WSJT-X FT8 encoder/decoder into the earbuds. After some consternation about running out of memory, the following was achieved! Using additional AI routines to help select which signal to decode, the team was able to convert this:
into this!
Needless to say we believe this is the most unusual compute platform that FT8 has ever been ported to, but the results were simply stunning, with decode rates as good as any of the popular programs currently in use on the PC market today.
SSB Operators were not left out!
Of course AREG is all about equality and accessibility. We do not tolerate discrimination in the group. So, it was important that the SSB voice folk felt they were part of the project too. Of course, then it dawned on us. They were already included, as all we had to do was turn off the decoded software and the pure sound of SSB HF radio could once more be relayed straight to their ears.
How can you get involved?
The system is still in it’s infancy, and so far only a couple of models of Earbuds have been cracked. However as soon as we have stable supplies and have completed licensing the software on git-hub, we will make it available to amateur radio operators to experiment further with!
Next steps are to be able to have the reverse direction function as well, so an operator can simply speak and the earbuds can then turn that into what ever CW or digital modulation system you desire!
Meanwhile, if you would like to know more, please contact us via the project page!
Horus 55 was the culmination of something that had been discussed for many years within the Project Horus team – Live video from a high-altitude balloon. The technical challenges in doing this are many, from designing a transmitter system that provides enough signal without melting in the thin atmosphere at high altitudes, to building a high performance receive system that can capture that signal, and then upload it to the internet for everyone to enjoy. (After all, if it didn’t get live-streamed, did it really happen?)
At 10:30AM on the 7th of March 2021, all of this came to fruition with the first flight of the Project Horus DVB-S payload.
The Payloads: DVB-S Transmitter
The DVB-S payload was the primary experiment on this flight, and had been in development by Mark VK5QI and Peter VK5KX over the last 12 months. The payload utilised a Raspberry Pi Zero W to capture and compress video (using F5OEO‘s DVB-S encoder and natsfr’s LimeSDR Gateware – this project would not have been possible without their work – thanks!), which was then modulated as a 70cm (445MHz) DVB-S transmission using a LimeSDR Mini. The signal was amplified to ~800mW using a LDMOS-based power amplifier. The overall power dissipation in the payload was ~6 watts, so a heat-spreading and heat-sinking system was built by Peter, including custom-milled interface plates for the LimeSDR.
The payload was powered from 8x Energizer Lithium AA primary cells, which are well-regarded for their low-temperature performance.
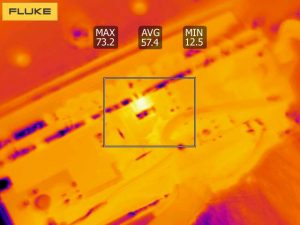
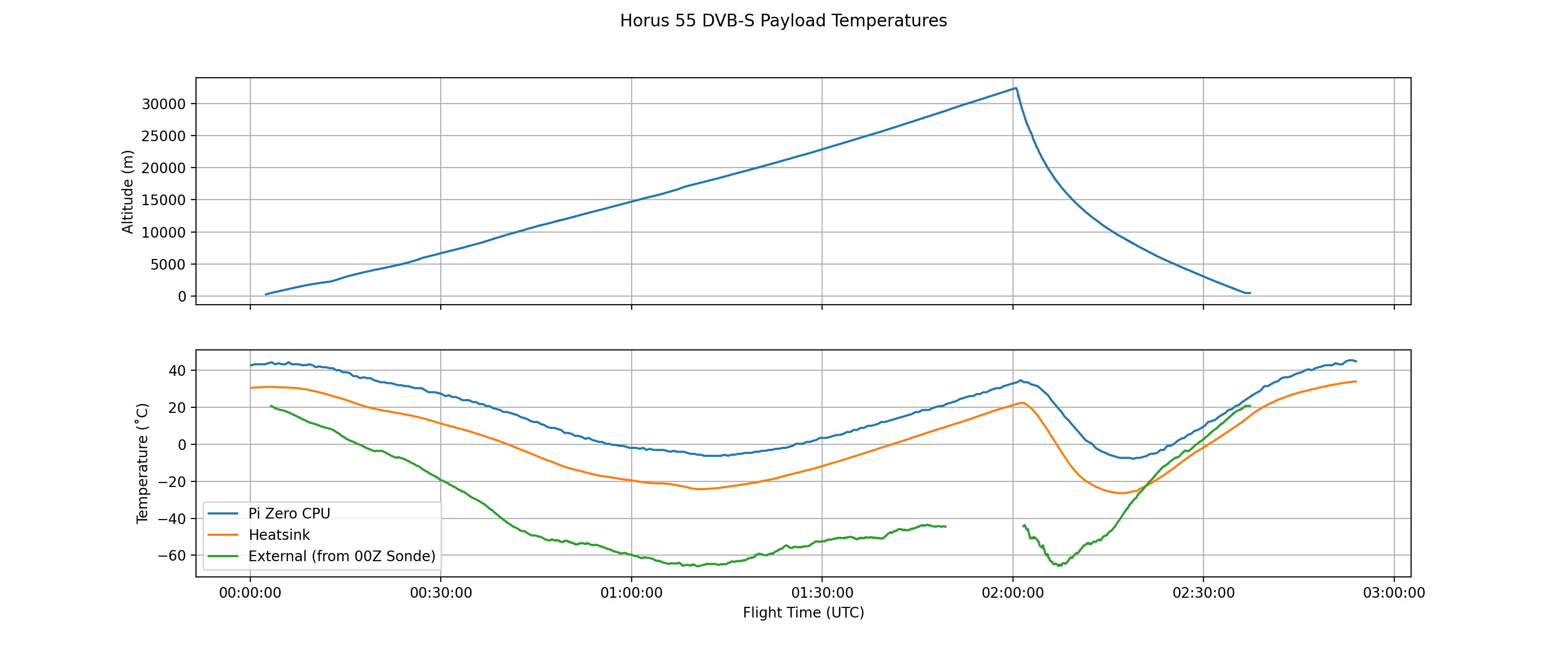
Much testing and tuning of the payload was performed in the lead-up to the launch, including monitoring of the temperatures within the payload when sitting in full-sun, to ensure it would not reach dangerous temperatures.
Mark VK5QI gave a presentation on the payload at the AREG February meeting, which is available here:
The final DVB-S parameters used on the flight were:
Frequency: 445.0 MHz
Mode: DVB-S
Modulation: QPSK, 1 Msps
Forward-Error-Correction: r=1/2
Video Resolution: 720 x 404
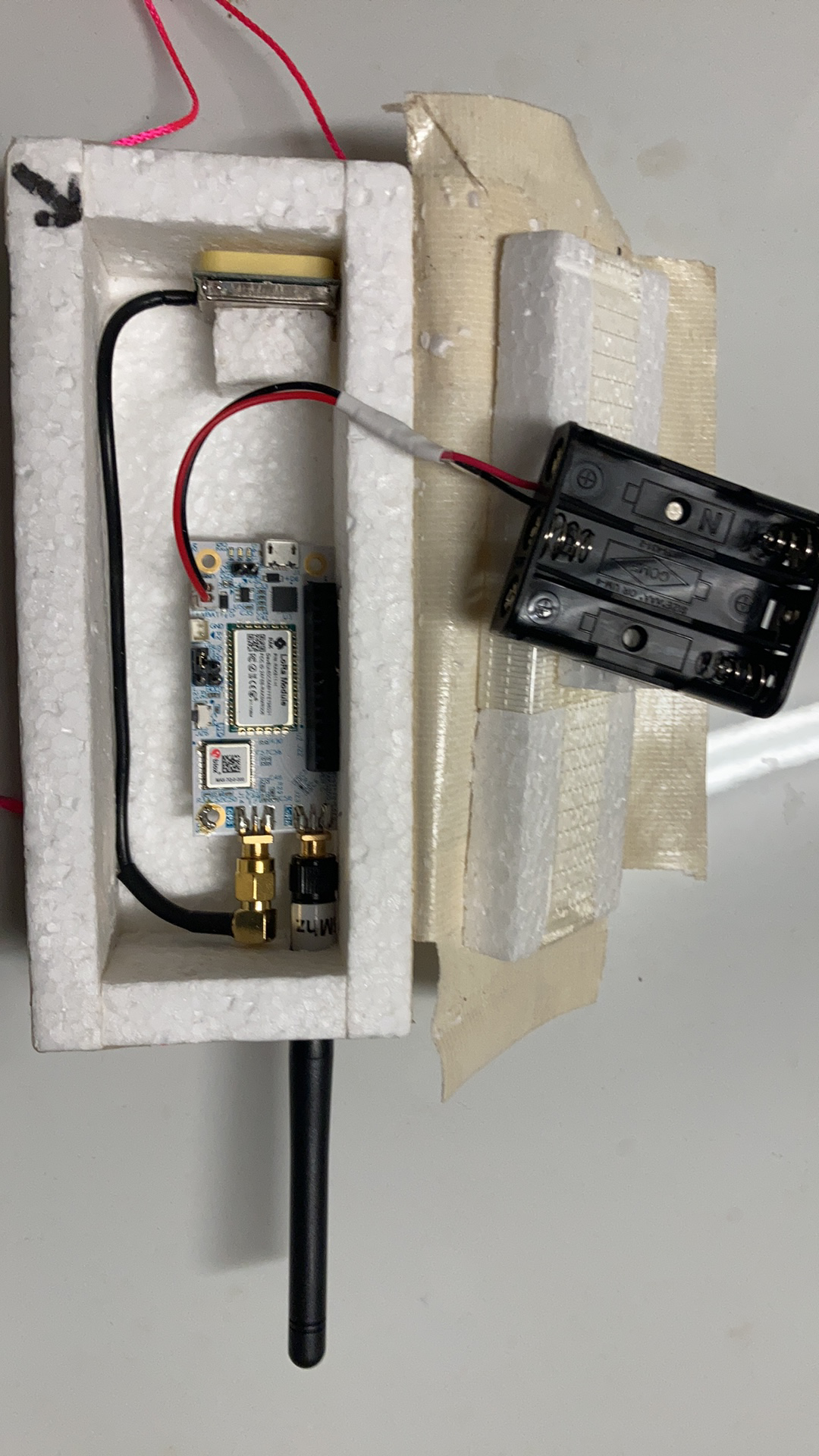
The Payloads: LoRaWAN Beacon
Also on this flight was an experimental LoRaWAN tracking payload built by Liam VK5LJG. The aim was to transmit position beacons into ‘The Things Network‘ (‘TTN’), which has gateways (receiver stations) in many locations across Australia.
The payload operated on the 915-928 MHz LIPD band, with a transmit power of ~50mW. The hardware was a RAK Wireless RAK5205 board, running custom firmware for the flight. Position updates were only sent every ~3 minutes to comply with TTN fair-usage guidelines.
We expected that this would be received by TTN gateways all around the Adelaide area… it actually performed much better than expected!
The Payloads: Tracking & Flight Management
The flight also included the usual complement of telemetry and flight management payloads. Primary telemetry was provided by a reprogrammed RS41, transmitting the ‘Horus Binary‘ 4FSK mode on 434.200 MHz. This was received by a large number of amateur stations running the ‘Horus-GUI’ demodulation software. Tracking of the payload was available on the HabHub tracker online, allowing global access to the position of the balloon throughout the flight.
The separate flight management payload was a LoRa-based payload operating in the 70cm (430.0MHz) amateur band. This payload allows remote termination of the flight if necessary (and it was actually used in anger this flight!).
Flight Preparation & Receiver Testing
On the weekend prior to the launch, two test-and-tune events were conducted, where receiving stations around the Adelaide area had the opportunity to configure and test the software and hardware necessary to receive the DVB-S signals. Transmissions were conducted from Steve VK5SFA’s QTH on Saturday, and from Black-Top Hill on Sunday. Both sites provided excellent line-of-sight to the Adelaide metropolitan are, enabling eight stations to be able to receive the test transmissions ready for the live balloon flight the following weekend.
Finally, a full systems check was conducted with Peter VK5KX. The test covered all of the equipment which would comprise the primary ground-station for the flight, receiving video from the payload and streaming it live to Youtube. This involved testing of the 2 x 18-element Yagi-Uda array, and all the receiver and streaming software. A big thanks to Hayden VK7HH for helping get the Youtube streaming working via his HamRadioDX channel.
Launch!
The ground station crew, chase teams, and spectators started to assemble at the Auburn Oval launch site around 9AM, to find that showers had set in.
It was decided to continue on with launch preparations and wait for the showers to pass.
By a bit after 10AM the showers had died away to a light sprinkling, and the balloon filling was started. Around this time the live-stream from the launch site was switched on, with many viewers from around the world tuning in to watch the proceedings.
The balloon used for this flight was a Totex 1000g, and an entire 3.5m^3 cylinder of helium (donated by the University of Adelaide) was used to fill it. Using the fast-fill rig the fill was completed in a few minutes (as opposed to the almost 1 hour of slow-filling that used to be required), and the balloon was tied off ready for launch.
After a final check that all payloads were working as expected, the (short) countdown began, and the balloon and payloads were released!
Ascent & Live Video!
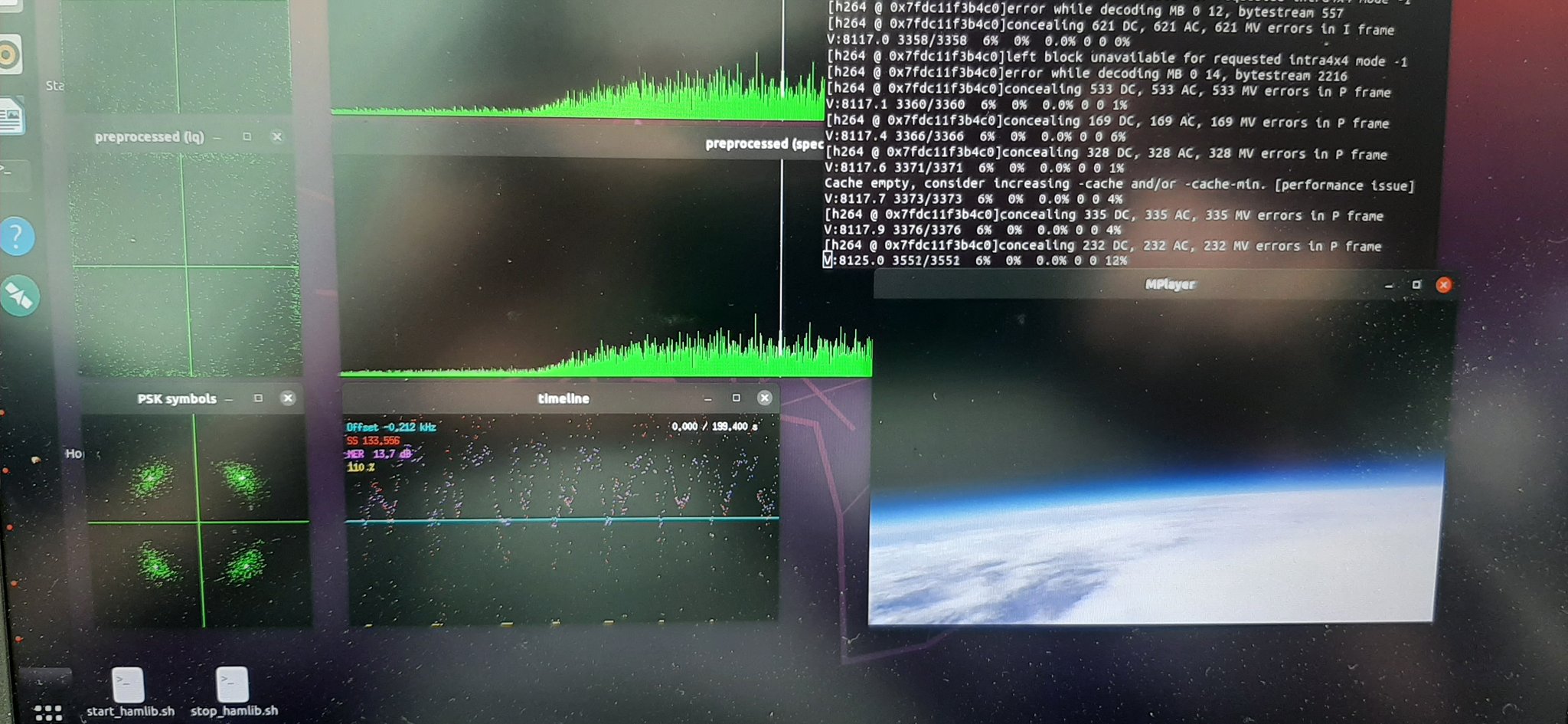
After launch the ground-station system was switched into ‘auto tracking’ mode, and began pointing the high-gain Yagi antennas to follow the balloon and payloads. This ensured the best quality video reception, and it definitely worked!
Viewers at the launch site and all around the world via Youtube were treated to clear visuals relayed from the primary ground station as the balloon ascended up to cloud-base. Reports from other receiving stations around the region started trickling in, with Ian VK5ZD (near Kapunda) and Joe VK5EI (Adelaide) being the first to report in.
As the balloon reached the first cloud layer the views of the surrounding landscape was replaced with grey, and the chase teams took this as a sign that it was time to head off towards the expected landing area. Meanwhile the ground control team of Matt VK5ZM, Pete VK5KX and Grant VK5GR kept watch on the balloon state and the TV signal being relayed to YouTube and being broadcast around the globe.
The ground-station team continue to keep tracking the payload, uploading live video to over 200 viewers on Youtube. A big thanks to Hayden VK7HH for hosting the live stream on his Youtube channel, and helping answer the many questions that were asked by the viewers throughout the flight. Please make sure to Like and Subscribe his Youtube channel!
One of the last shots received before the balloon was cut away so the payloads could land
Chase, Cutdown & Recovery
This flight had four chase teams:
Mark VK5QI and Will VK5AHV
Darin VK5IX, along with Cameron and Dan
Liam VK5LJG
Gerard VK5ZQV
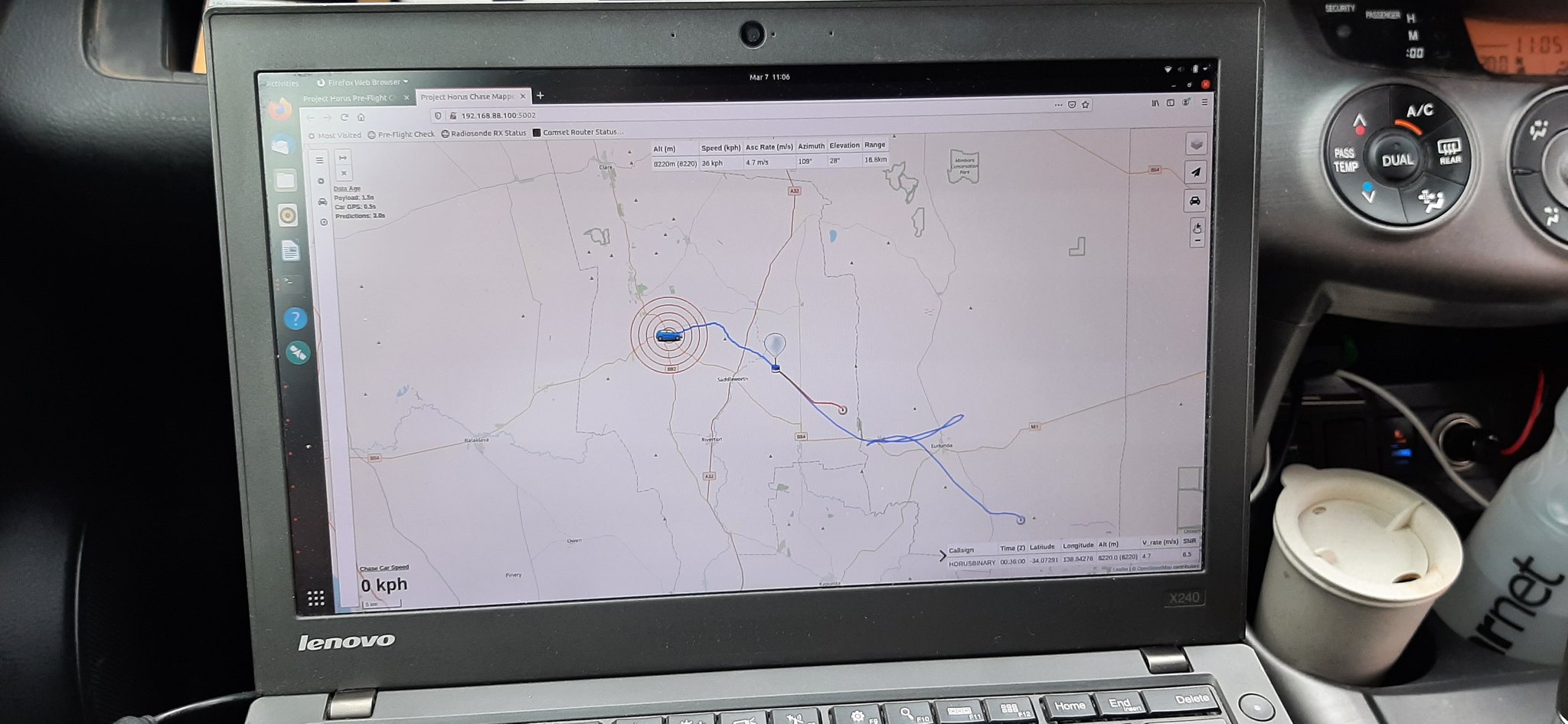
All the teams headed off in convoy towards Eudunda as their first stop, where the traditional bakery visit was made mid-flight instead of after recovery.
Mark and Will were receiving the video from the DVB-S payload in the car, which worked surprisingly well even with the fairly modest antenna setup on Mark’s car (an upward-fading turnstile).
After a quick lunch, the teams headed south towards the predicted landing area. As the flight processed and the balloon rose past the expected burst altitude of 30km, Mark made the call to terminate the flight to help land the payloads in an easily recoverable area. A few radio commands later, the payloads started falling, with the cut-down event observed via the video link (though the fast tumbling did result in a lot of broken video). The maximum altitude achieved was 32379m above sea level.
The teams headed towards the new predicted landing location, and after a bit of back-and-forth were able to be in position to watch the payloads land under parachute. Unfortunately the payloads were just a bit too far away for the teams to get imagery of the final descent.
After getting permission from the landowners (thanks!), the teams were able to enter the property and drive almost right up to where the payloads had landed.
While a bit bent and dented (and upside-down!), the DVB-S payload continued to transmit video after landing, with the receiver in Mark’s car capturing the team walking up and recovering the payload.
Analysis of log files from the payload showed that overheating was certainly not an issue – instead the heat-spreader plate within the payload reached a chilly -27˚C during the descent phase of the flight!
DVB-S Reception Reports
So far the following stations have reported being able to receive video from the DVB-S payload:
If you received video from this flight, let us know!
The longest distance the payload was received from was by the stations in Whyalla, at almost 190 km range, followed by Bill in Middleton, at 145km range. The payload designers are absolutely ecstatic at how many stations were able to receive video during this flight – hopefully we can repeat this success on more flights in the future!
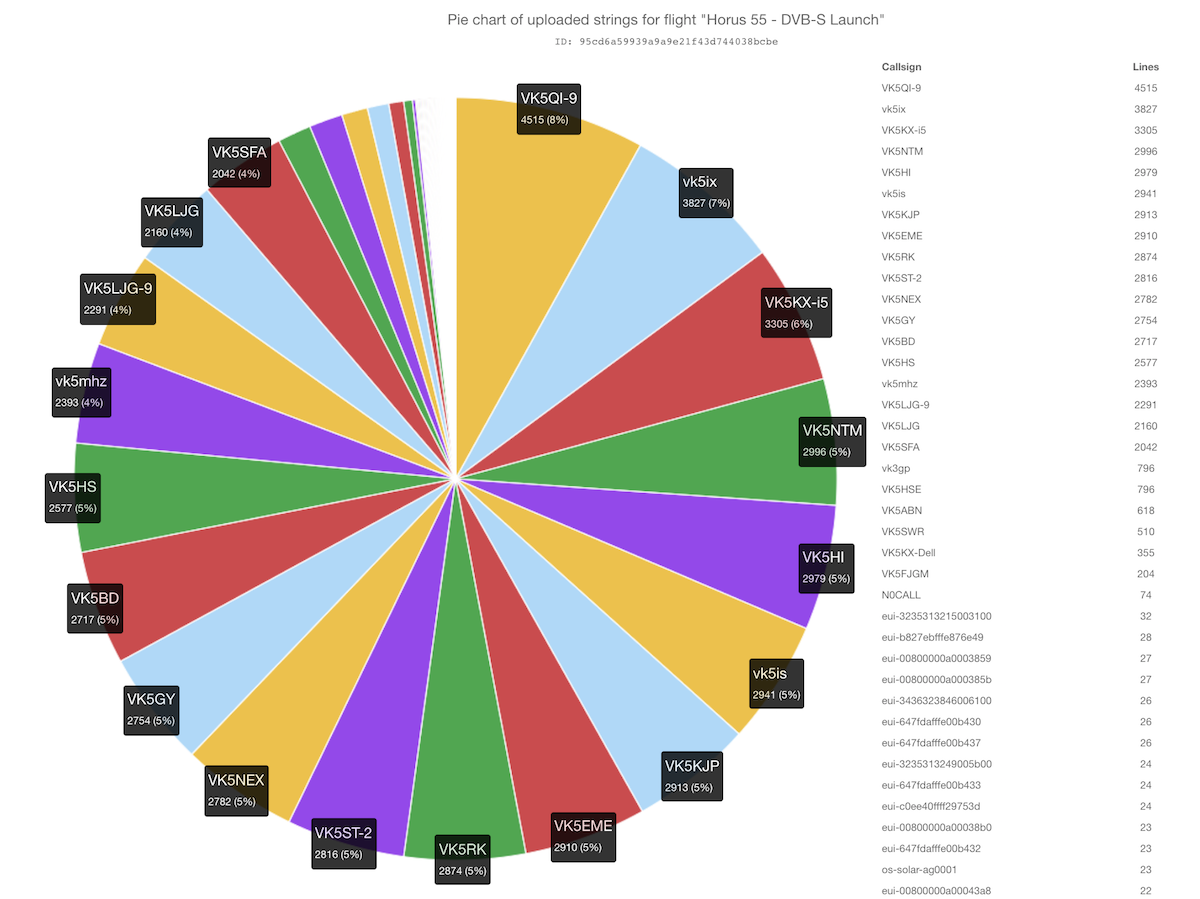
With every Project Horus flight we like to thank all the receivers that helped receive telemetry from the flight. All the telemetry you receive and upload to the net helps keep the tracking map up-to-date throughout the flight, and serves as a backup in the case of ground-station or chase-car receiver failure. On this flight telemetry was recorded from as far away as Horsham, though there were reports of telemetry reception in Melbourne – however it appears these stations did not upload their telemetry to the internet.
Callsign
Received Packets
Percentage of Flight Received
First-Received Altitude (m)
Last-Received Altitude (m)
VK5ABN
399
20.1%
8138
1585
VK5BD
1748
88.2%
1070
2142
VK5EME
1871
94.4%
679
1599
VK5FJGM
121
6.1%
11592
3349
VK5GY
1771
89.4%
927
2975
VK5HI
1919
96.8%
549
1278
VK5HS
1659
83.7%
4142
1702
VK5HSE
507
25.6%
28528
987
VK5KJP
1874
94.6%
699
658
VK5KX-i5
1878
94.8%
306
1013
VK5LJG (Home)
1381
69.7%
2946
3156
VK5LJG-9
965
48.7%
306
4916
VK5NEX
1798
90.7%
801
1637
VK5NTM
1930
97.4%
886
498
VK5QI-9
1799
90.8%
306
498
VK5RK
1853
93.5%
1214
825
VK5SFA
1311
66.1%
631
2131
VK5ST-2
1829
92.3%
556
670
VK5SWR
330
16.6%
11309
18461
VK3GP
509
25.7%
19672
13866
VK5IS
1893
95.5%
579
1026
VK5IX-9
1913
96.5%
306
498
VK5MHZ
1533
77.3%
4583
2741
LoRaWAN Experiment Results
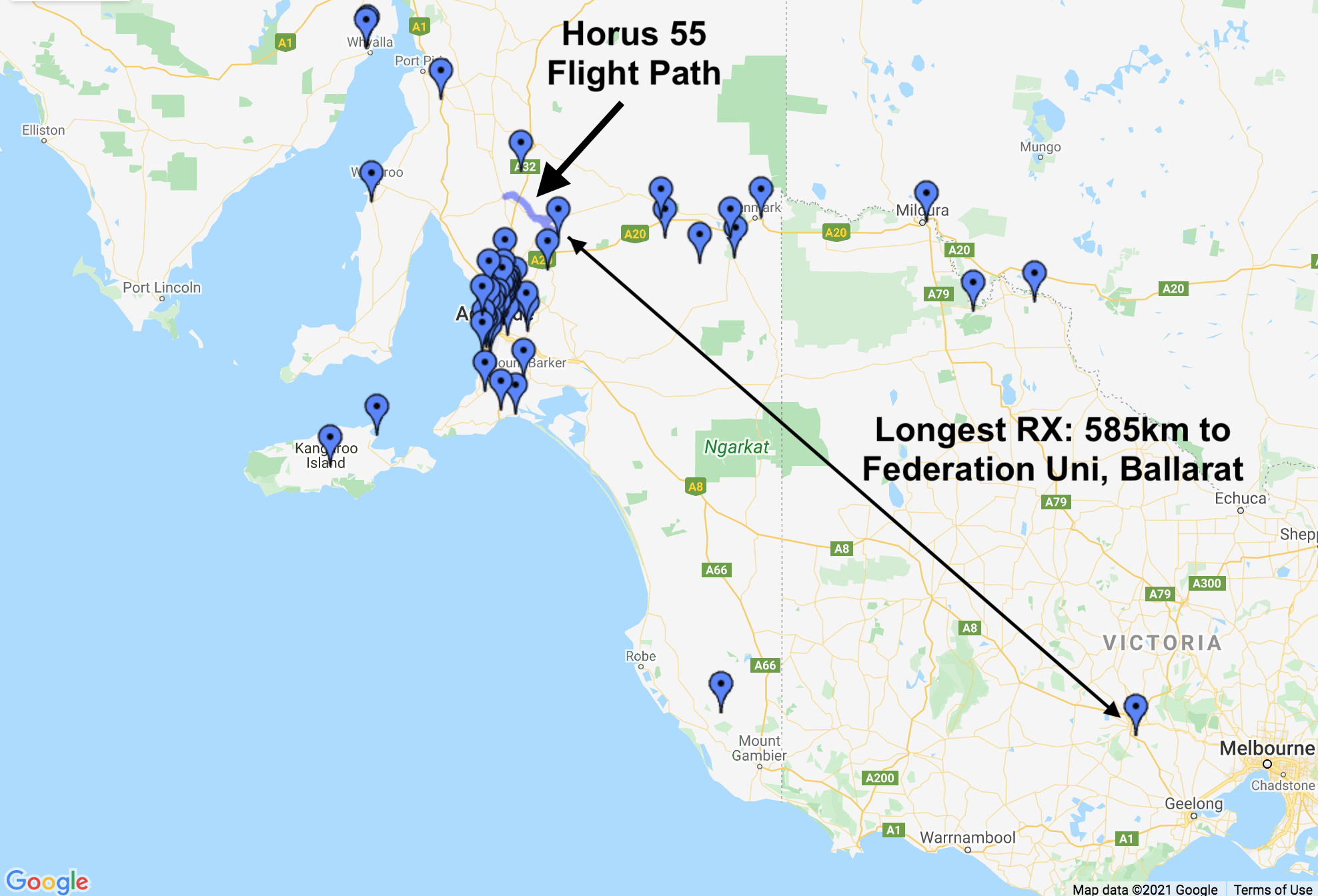
As mentioned earlier, the LoRaWAN payload was transmitting telemetry packets to be received by The Things Network gateways. We expected the payload to be received by stations in the general Adelaide area, however it turned out that at the peak of the flight we were received by gateways as far away as Ballarat, Victoria! Full details on what gateways received each packet are available here.
The longest path was 585km, which for a ~50mW transmitter at 923 MHz is quite an achievement! The world record distance for this system is 823km, and we’re interested to see if we can beat this on a future launch!
Flight Track
At the conclusion of the flight we were also able the telemetry into this flight profile, which gives an appreciation of the journey the balloon and the experimental TV transmitter under took.
Conclusion & Future Flights
Horus 55 - Flight Statistics
Metric
Result
Flight Designation:
Horus 55
Launch Date:
2021-03-07 00:02Z
Landing Date:
2021-03-07 02:37Z
Flight Duration:
~2.5 hours
Launch Site:
-34.02932,138.69124
Landing Site:
-34.25959,139.11443
Distance Traveled:
46 km
Maximum Altitude:
32,379 m
With the huge success of this flight, the team plans to follow this up with more video flights in the future. There are many lessons to be learnt from this flight, and many improvements that can be made to both the payload, the ground-station, and the live-streaming systems. Viewers can look forward to higher quality video, more running commentary, and hopefully live video from the chase-cars as they recover the payloads.
The next few months will be getting busy for the Amateur Radio Experimenters Group, with the upcoming Riverland Paddling Marathon taking up a lot of club members time. Expect the next full-scale flight sometime in late June – weather permitting!
Often, during the summer months, it is often possible to hear FM broadcast stations from far and wide thanks to the Ionosphere and Troposphere bending signals over the horizon. There are a few tricks to getting the most out of tuning the broadcast band looking for that distant station however.
At the next AREG meeting on Friday the 20th of November, Andy, VK5LA will give a presentation on “DXing” the FM band. He will discuss, what gear is needed, what gear works best and how to identify stations you don’t normally hear and cover topics like locations, antenna polarisation, and explore the RDS station ID feature built in to most modern FM receivers.
Andy will also discuss using the ACMA database to determine if that exotic station you’ve just tuned in to is 70, 700 or 1700 km away and describe the various propagation modes that make this interesting activity possible. Finally he will take a look at how that information can be used to predict openings on the 6 metre (50MHz) band and above.
How can you take part in this meeting?
Due to the latest COVID-19 restrictions, the presentation will be via Zoom for members starting by 7.45pm South Australian Summer Time.
Visitors will be able to watch the lecture via Hayden VK7HH’s HamRadio DX Channel on YouTube.
We hope to see you there!
For interstate viewers the times are:
8.15pm AEDT (Victoria, New South Wales, Tasmania, Canberra)











")
")


")
")
")
")
")
")







 Visitors will be able to watch the lecture via Hayden VK7HH’s HamRadio DX Channel on YouTube.
Visitors will be able to watch the lecture via Hayden VK7HH’s HamRadio DX Channel on YouTube.