
UPDATE 21/8: Thanks to all that helped track this flight, it was a great success! A blog post with more information, including lots of great images, will be up in about a week.
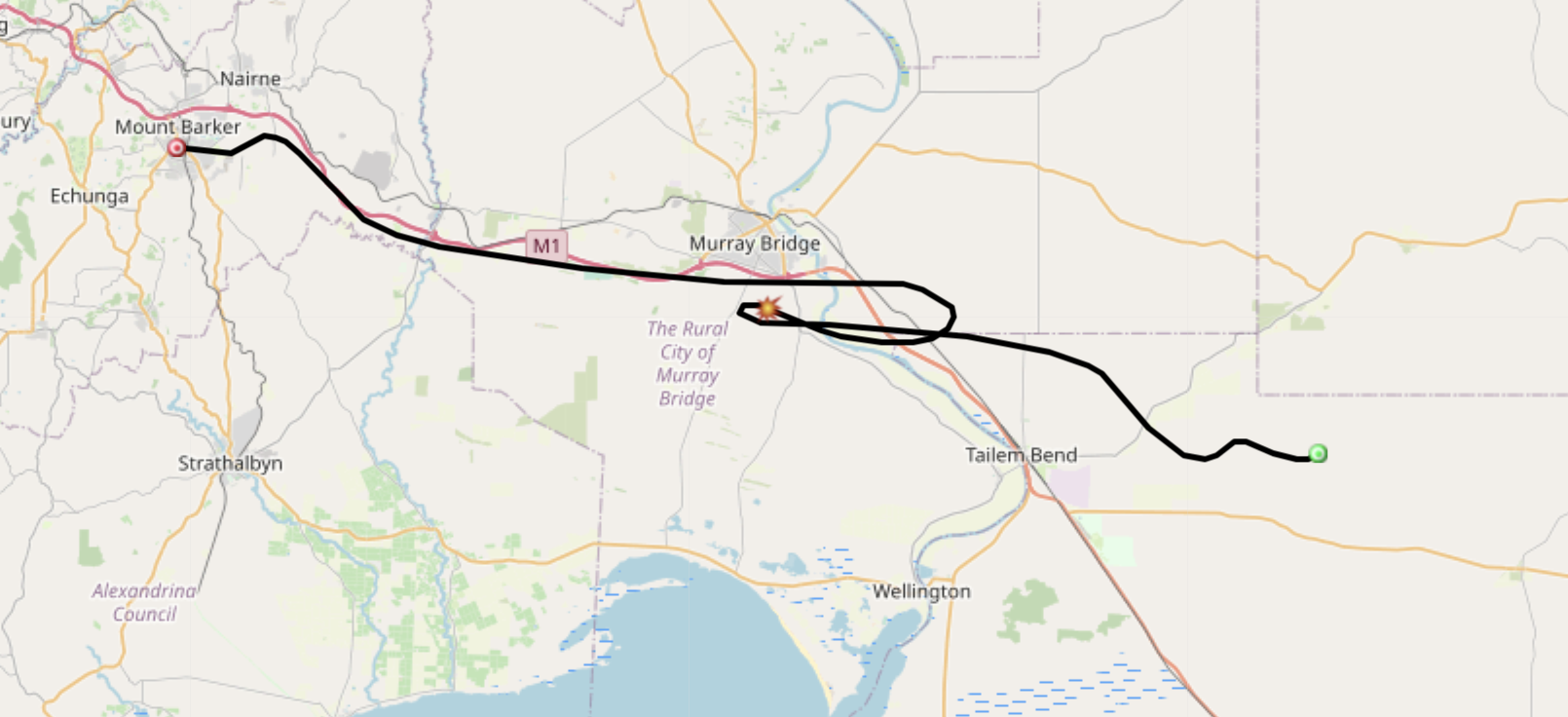
Horus 60 Flight path prediction as of 17th August
As part of the VI25AREG celebrations, AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 20th of August, with a planned launch time of 10 AM ACST. Backup dates if we have to slip due to weather are the 27th of August… and that’s it!
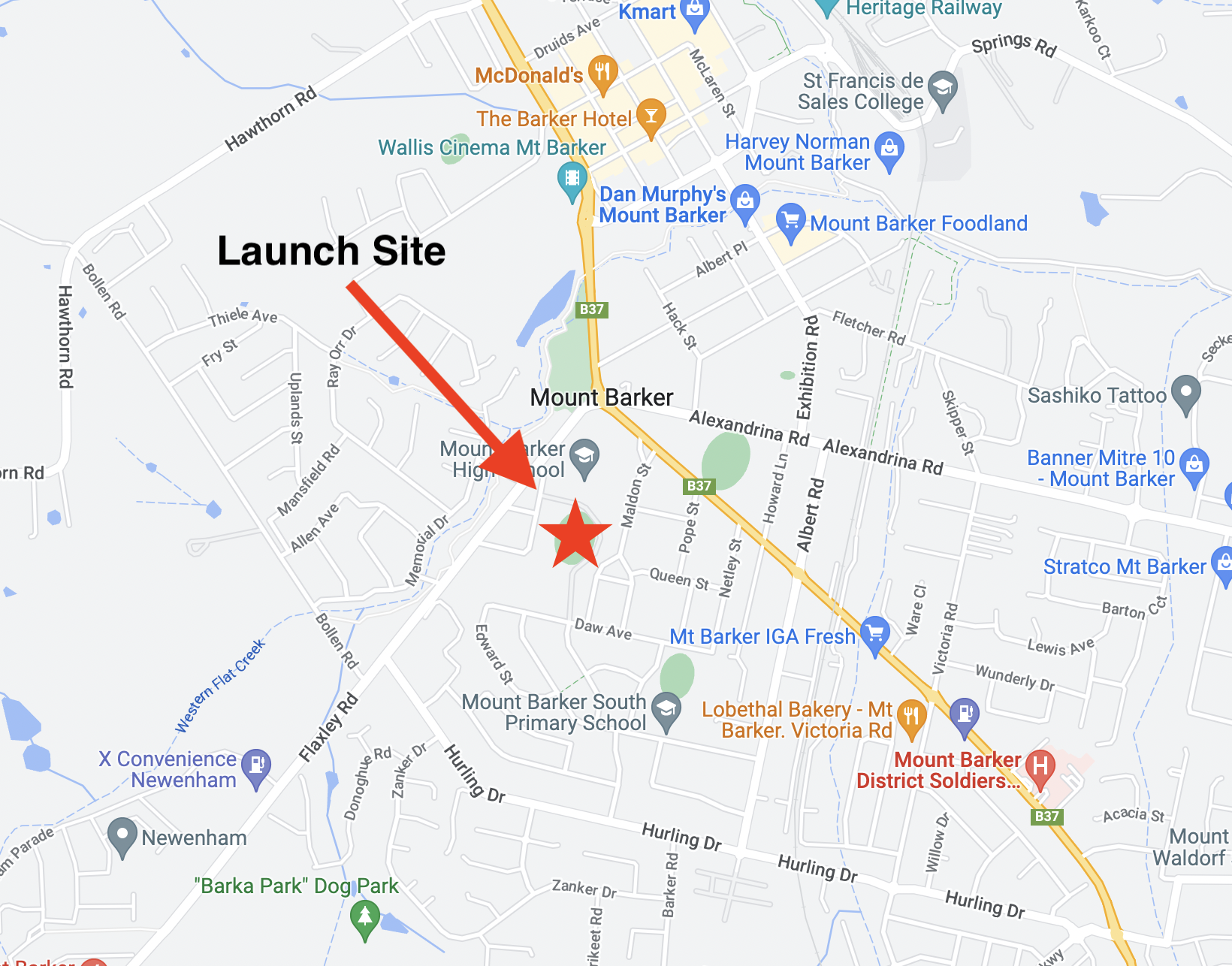
This launch is currently planned to be performed from the Mt Barker High School Oval with the launch team arriving on site from around 9:00 AM. Note that access to the oval is via Stephenson street, and parking near the oval is extremely limited.
The payloads for this flight will include:
- A FM-SSTV Transmitter on 145.100 MHz
- A Wenet Imagery transmitter on 443.500 MHz
- Primary Horus Binary telemetry on 434.200 MHz
- Experimental Radiation Sensor payload (Horus Binary telemetry) on 434.210 MHz
Details on these payloads are available further below.
{kind=link}
Tracking of the flight will be via the SondeHub-Amateur tracker, available by clicking this link.
A dashboard showing telemetry from the payloads is available at this link.
Details on the payloads flying are available below:
Primary Telemetry – 434.200 MHz – VI25AREG
 The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
If you try receiving the telemetry from this flight, you’ll need a SSB-capable 70cm receiver (or a SDR), and the Horus-GUI telemetry decoder software. A brief guide on setting this up is available here: https://github.com/projecthorus/horusdemodlib/wiki/1.1-Horus-GUI-Reception-Guide-(Windows-Linux-OSX)
Listeners that already have Horus-GUI installed are encouraged to update to the latest version, which is available at this link.
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
There will also be an experimental radiation sensor payload (HORUSRADMON) on 434.210 MHz (434.209 MHz USB dial frequency). If you can only receive one, prioritise the 434.200 MHz signal.
FM SSTV Imagery – 145.100 MHz
This launch will most likely be flying a FM SSTV transmitter operating on 145.100 MHz FM. It will run approximately 200mW transmit power. The transmitter will have 1 minute gaps between image transmissions to avoid overheating the transmitter. This payload last flew on Horus 59 with good results.
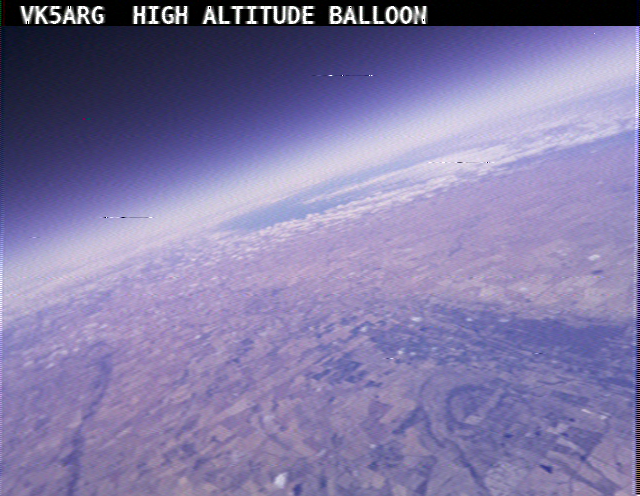
SSTV image from Horus 59
The payload will be transmitting images using the PD120 SSTV mode throughout the flight, and can be decoded using any SSTV software capable of decoding this mode (pretty much all of them!). This mode is what was commonly broadcast from the International Space Station.
Examples of suitable software you can use to decode the SSTV pictures include:
- MMSSTV (Windows),
- BlackCat SSTV (OSX),
- QSSTV (Linux),
- Robot36 (Android), and
- SSTVPad (iOS).
Any FM receiver (including handhelds) should be capable of receiving this payload, though as with the cross-band repeater, a Yagi antenna may be necessary for reliable reception at the edges of the transmitter footprint.
We’ve also setup a temporary 2m SSTV skimmer up at AREG’s remote HF receive site, which (if it works!) will post received images here: https://botsin.space/@aregsstv/tagged/PD120
We will have some digital certificates available for listeners that submit an image from the highest 1km of the flight (to be determined after the flight has finished). Email your images to vi25areg@areg.org.au !
Wenet Imagery – 443.500 MHz
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a Linux computer, a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
This payload will be trialing a PiCamera HQ, with a much larger lens. This will hopefully give us much higher quality imagery than we’ve seen previously, so long as we don’t hit focus drift issues like we have seen on previous flights.

Wenet imagery from a previous launch.
A guide on how to get set up to receive the Wenet signal is available here: https://github.com/projecthorus/wenet/wiki/Wenet-RX-Instructions-(Linux-using-Docker)
Please note the transmit frequency of 443.5 MHz, which may require listeners to re-configure their Wenet setup. Listeners who are already setup to receive Wenet should consider updating their decoding software to the latest version (Due to be released at the beginning of August 2023), with update instructions available here.
During the flight, the live imagery will be available at this link: http://ssdv.habhub.org/