

The next Project Horus launch is planned to occur on Sunday the 18th of January. This will be a flight to test out a few new payload ideas, including:
- A re-flight of the PiCam v3 Wenet imagery payload, now with a camera shroud to hopefully assist autofocus.
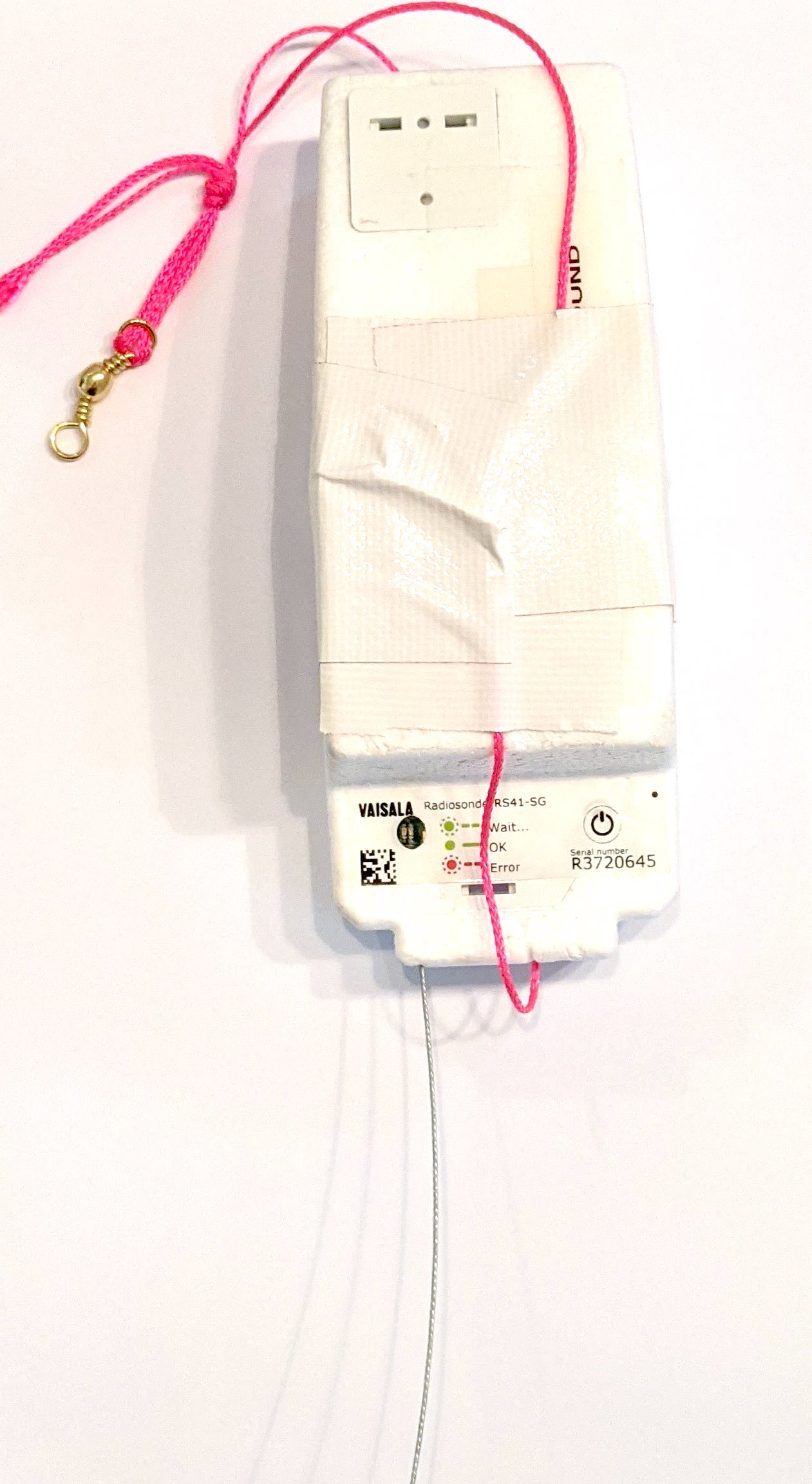
- The first test of a tracking payload running a new Horus Binary v3 mode.
A Meshtastic beacon from the SA Meshtastic Users Group (which includes quite a few AREG club members!).Unfortunately this will not be flying this launch. Expect this on our next launch!
This launch is currently planned to be performed from the Mt Barker High School Oval, which is accessible from Stephenson Street, Mt Barker.
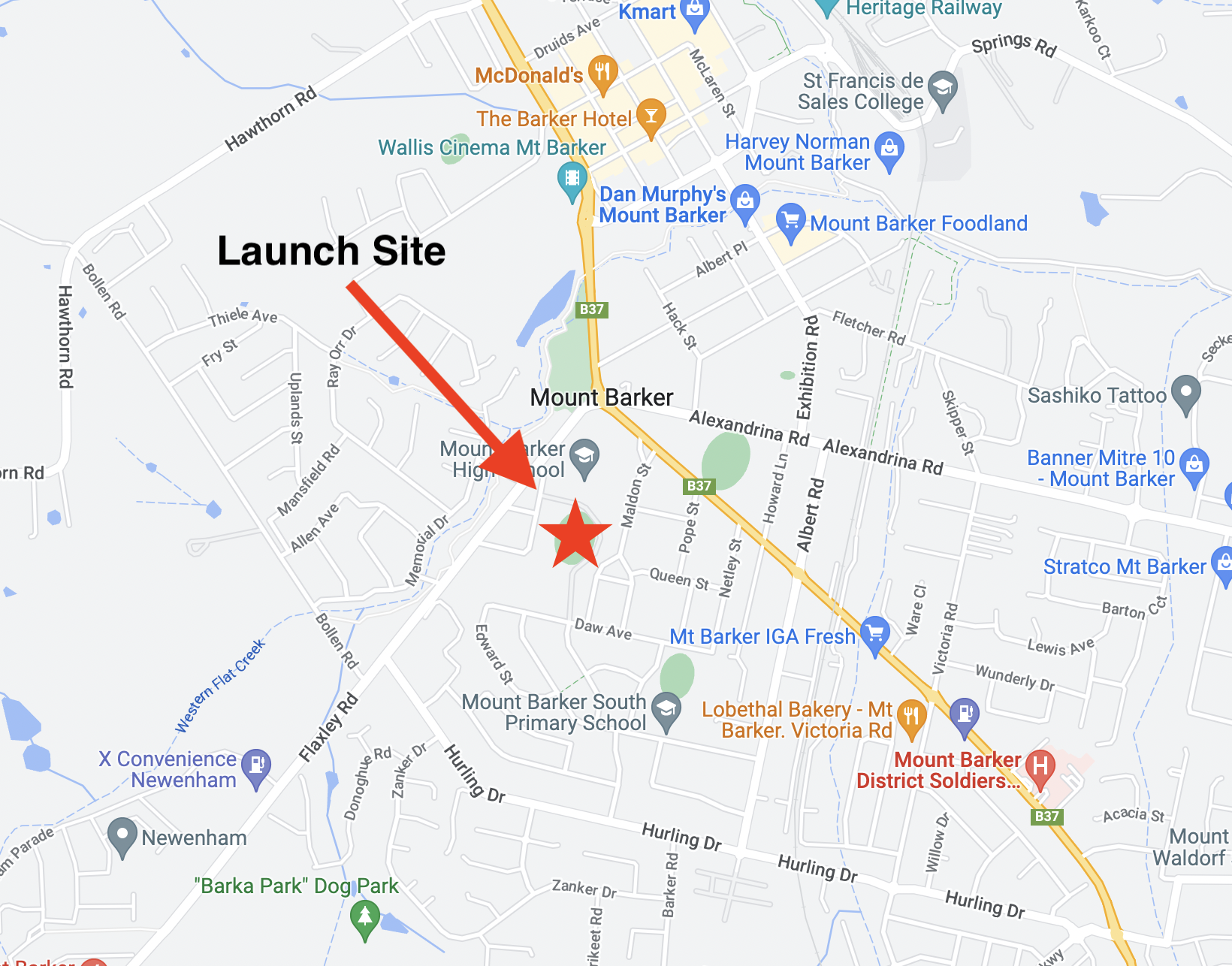
Mt Barker Launch Site
The launch time is expected to be our usual 10AM, with launch crews arriving on-site around 9-9:30 AM.
Hopefully this will be a nice launch!
TRACKING LINKS
- Flight Tracking via SondeHub-Amateur: https://amateur.sondehub.org/#!mt=Mapnik&mz=9&qm=12h&mc=-35.0677,139.23902
- Live Wenet Imagery: https://ssdv.habhub.org/
Details of the frequencies in use on this flight are:
- Primary Horus Binary Telemetry on 434.200 MHz
- Experimental Horus v3 Binary Telemetry on 434.210 MHz
- Wenet v2 Imagery on 443.5 MHz.
Meshtastic Payload on the Adelaide standard frequency of 918.875 MHz, ShortFast mode, Slot 16. Information on the Adelaide Meshtastic network is available here.
On this flight we encourage new listeners to try out our new web-browser-based decoding software for Horus Binary and Wenet – find out more about this further below!
Primary Telemetry – Horus Binary 434.200 MHz – HORUS-V2
 The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
If you try receiving the telemetry from this flight, you’ll need a SSB-capable 70cm receiver (or a SDR), and the Horus-GUI telemetry decoder software. A brief guide on setting this up is available here: https://github.com/projecthorus/horusdemodlib/wiki/1.1-Horus-GUI-Reception-Guide-(Windows-Linux-OSX)
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
Horus Binary telemetry can now also be received using your web browser, using either a SSB receiver or even a RTLSDR!
Click this link to start up a browser-based receiver:
We’ve also got a guide on how to use this here: https://youtu.be/VrgqF7ly-mU
Experimental Telemetry – Horus Binary v3 434.210 MHz – HORUS-V3
This launch will include our first time flying our new Horus Binary v3 mode! This is an upgrade to the Horus Binary telemetry system giving users more flexibility and allowing easier addition of custom fields.
This will be transmitting on 434.210 MHz. The modulation is the same as Horus v2 (100 baud 4FSK), so it’ll sound the same, but unless you’re running our beta decoding software it will not decode correctly!
There are a few options if you want to try receiving the Horus v3 telemetry on this flight, they are:
- Windows/Mac/Linux: Use our ‘development version’ WebHorus decoder, accessible by clicking here.
- Windows: Install a beta version of Horus-GUI
- Linux: Install a beta version of horusdemodlib.
You can find out more information about Horus v3, and how to get the beta-version software by clicking here!
Wenet Imagery – 443.500 MHz – USING NEW v2 MODE!
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 96 kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
We’ll once again be trying out the PiCam 3 camera (which we have had focus issues with on previous flights), this time with some new software changes, and a new shroud around the camera to reduce the effect of wind on the autofocus mechanism.
We will be using the new ‘Wenet v2’ mode, as used successfully on recent Horus launches. There is information on updating existing Wenet receive setups available here.
Wenet can now be received on almost any modern computer, and even some newer android devices, using the new WebWenet software! This operates entirely within a web browser. Information on how to get setup to use this is available here: https://www.youtube.com/watch?v=Euo4BGB6wUU
Click this link to start up a browser-based receiver:
Wenet Web Receiver – 443.5 MHz
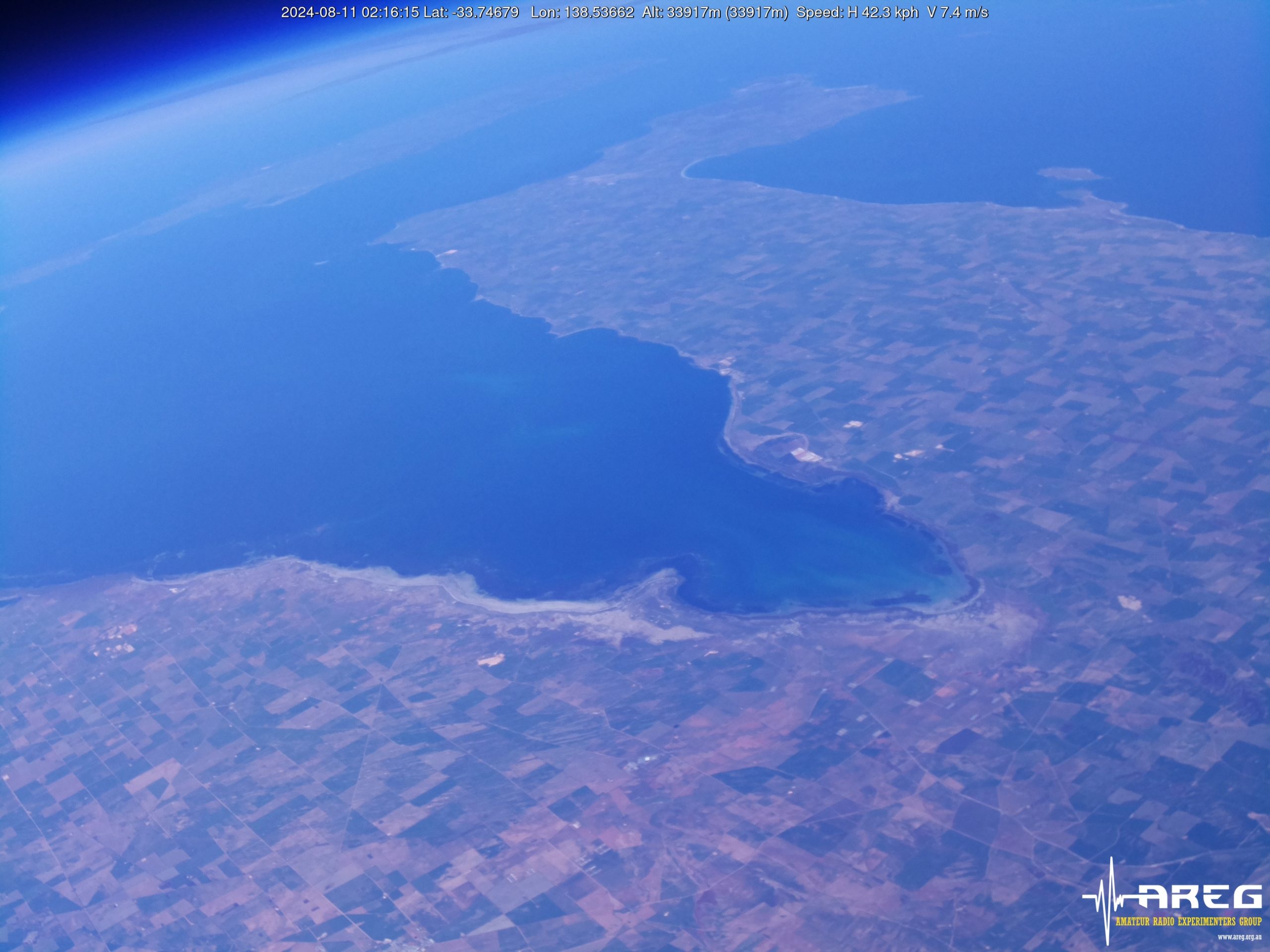
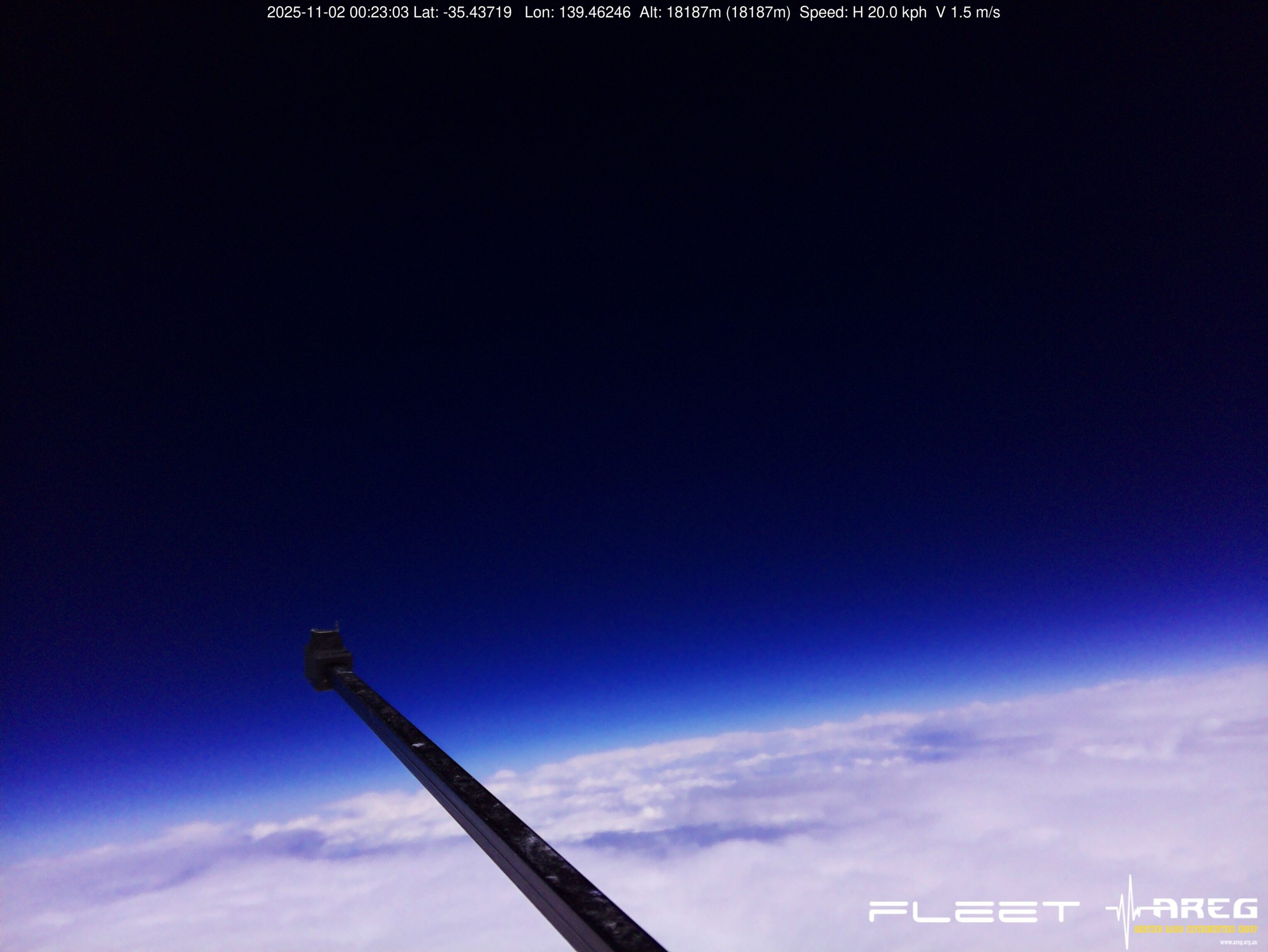
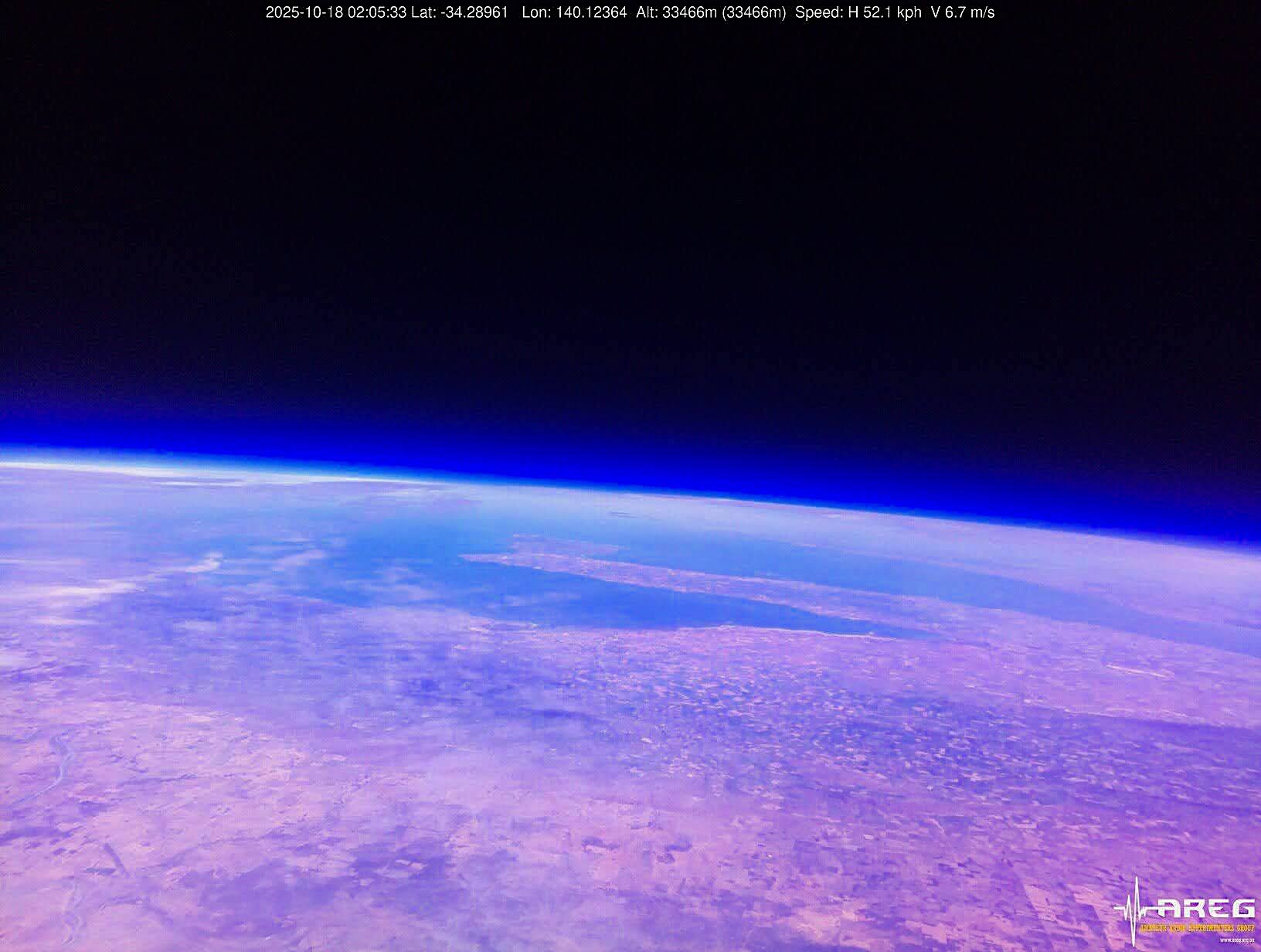
Wenet imagery from Horus 62
We encourage new listeners to try out the WebWenet software for decoding signals on this flight – however you can also still receive the signal using the Linux-based decoder, with details on this available here:
https://github.com/projecthorus/wenet/wiki/Wenet-RX-Instructions-(Linux-using-Docker)
During the flight, the live imagery will be available at this link: http://ssdv.habhub.org/
































































































{kind=link}