Here are some pictures from our BBQ and Parks activity day. We had HF, Foxhunting and more with many of the club members participating either through being there or contacting VI25AREG on the air!





Here are some pictures from our BBQ and Parks activity day. We had HF, Foxhunting and more with many of the club members participating either through being there or contacting VI25AREG on the air!
F olks, did you know about the VI25AREG special event certificate of achievement? AREG is offering a special digital certificate to any amateur radio operator who can provide evidence (ADIF log is fine) of contact with the callsign on three different transmission modes!
olks, did you know about the VI25AREG special event certificate of achievement? AREG is offering a special digital certificate to any amateur radio operator who can provide evidence (ADIF log is fine) of contact with the callsign on three different transmission modes!
More details are available (here)
AREGs next car-based fox hunt will be held this coming Friday the 11th of August, starting from the car park of the North Adelaide Aquatic Centre Carpark at 6:30 PM. We’ll have three foxes deployed around the Adelaide area, on both the 2m and 70cm bands, so come along and have a go!

The frequencies will be:
As usual, liaison will be on the VK5RSB Summertown 70cm repeater which operates on 439.900 (-5MHz) 91.5 CTCSS. Please come up on the repeater so we know how you are faring throughout the evening!
The event is open to anyone with radio direction finding equipment and will cover a ~5km radius from the start location. We would love to see you there!
73
Mark VK5QI
UPDATE 21/8: Thanks to all that helped track this flight, it was a great success! A blog post with more information, including lots of great images, will be up in about a week.
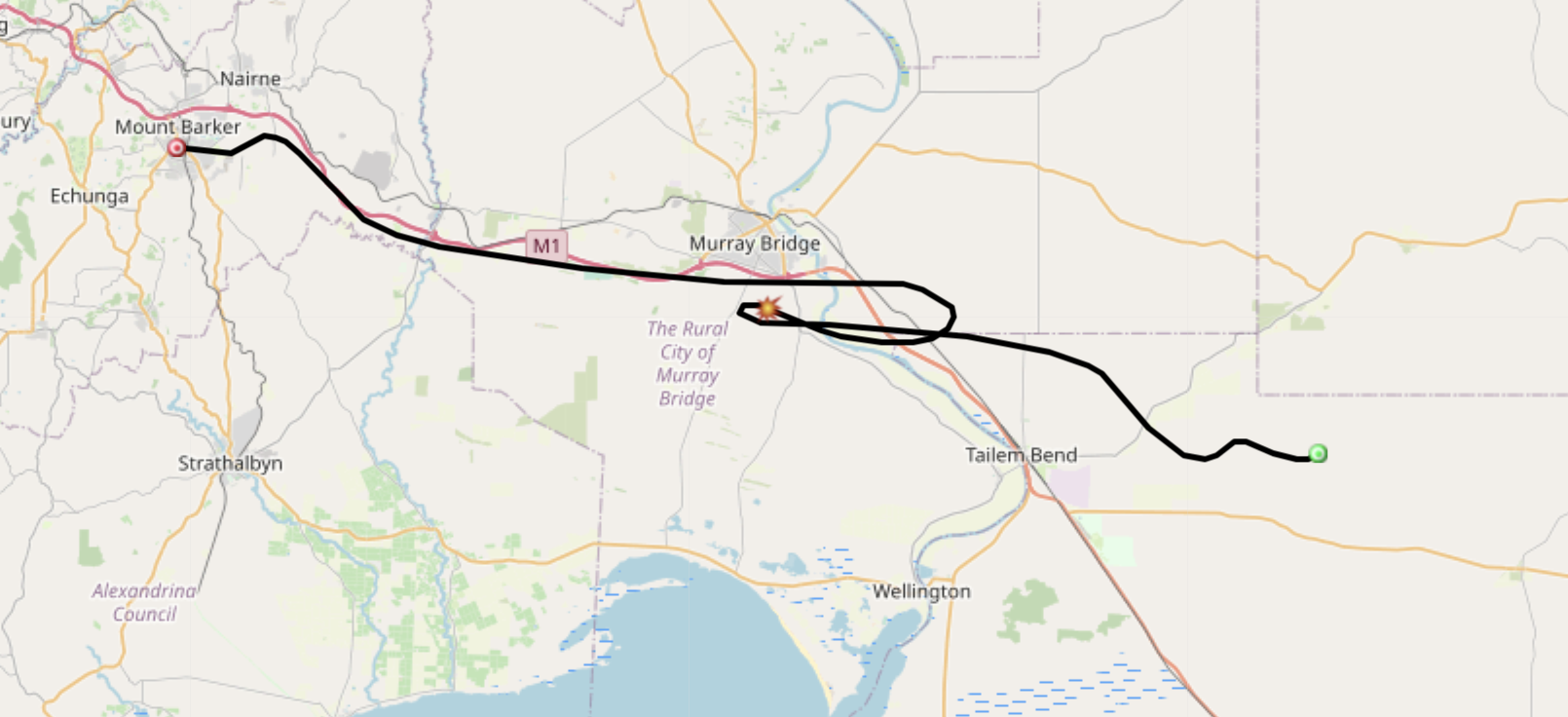
Horus 60 Flight path prediction as of 17th August
As part of the VI25AREG celebrations, AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 20th of August, with a planned launch time of 10 AM ACST. Backup dates if we have to slip due to weather are the 27th of August… and that’s it!
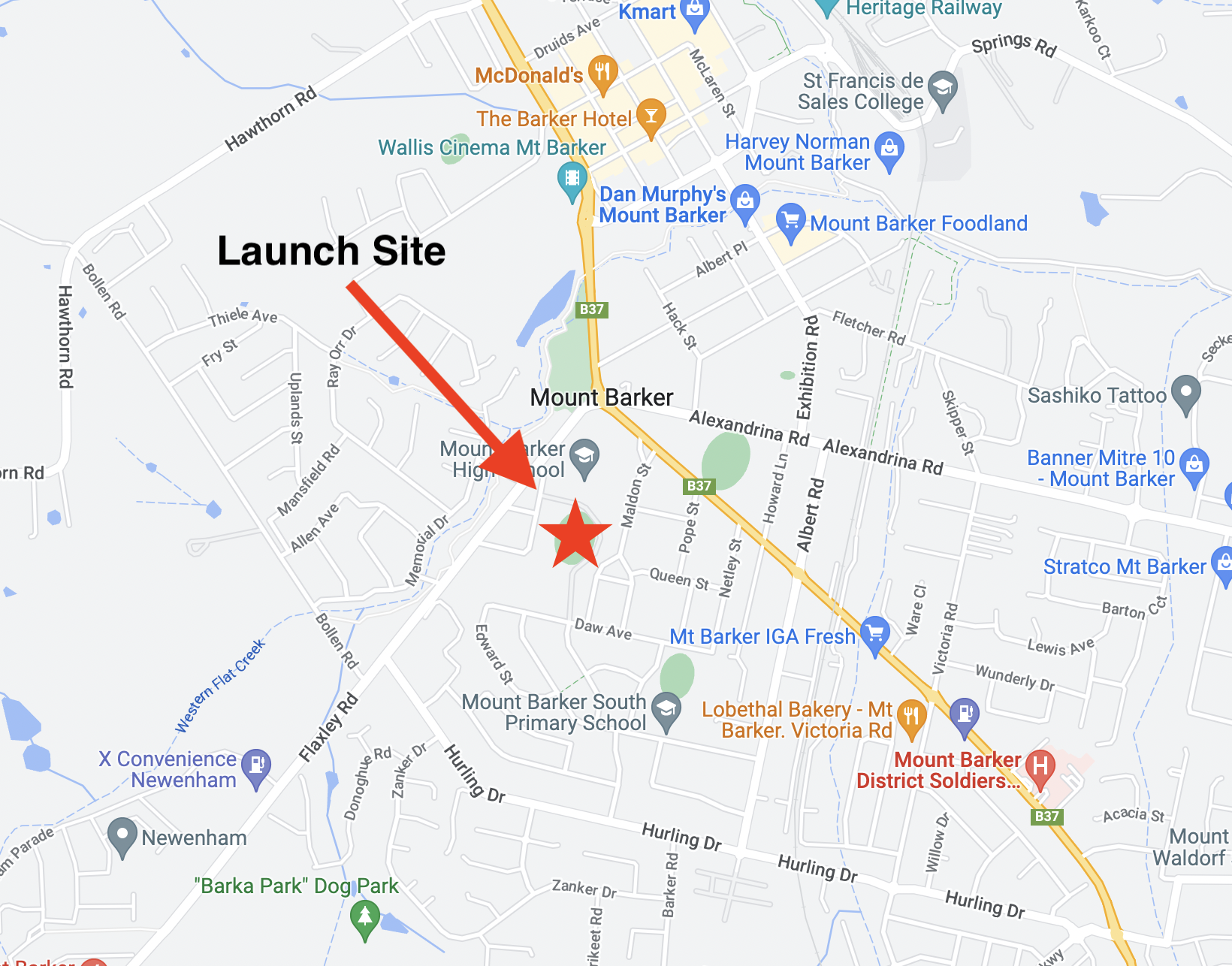
This launch is currently planned to be performed from the Mt Barker High School Oval with the launch team arriving on site from around 9:00 AM. Note that access to the oval is via Stephenson street, and parking near the oval is extremely limited.
The payloads for this flight will include:
Details on these payloads are available further below.
Tracking of the flight will be via the SondeHub-Amateur tracker, available by clicking this link.
A dashboard showing telemetry from the payloads is available at this link.
Details on the payloads flying are available below:
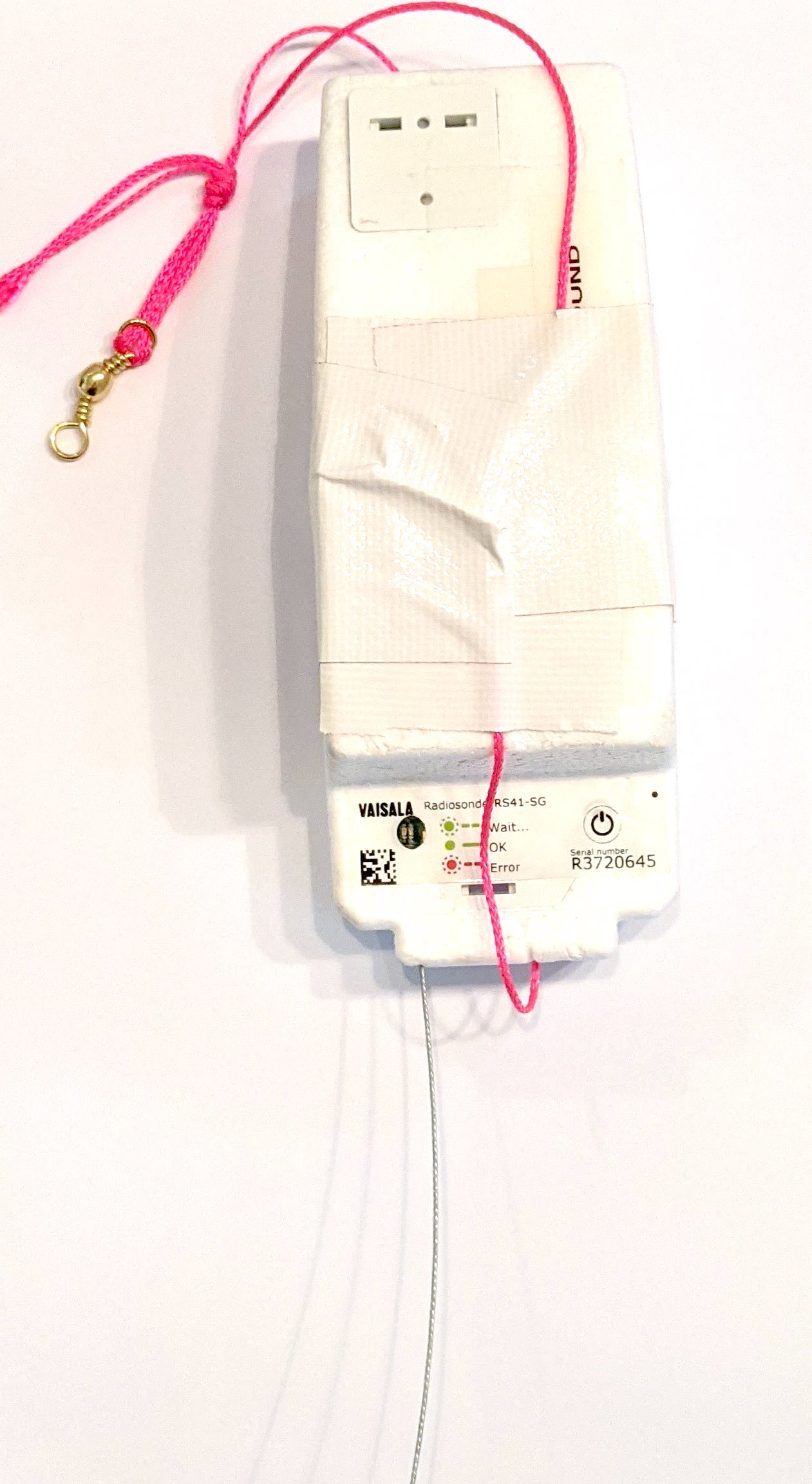 The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
If you try receiving the telemetry from this flight, you’ll need a SSB-capable 70cm receiver (or a SDR), and the Horus-GUI telemetry decoder software. A brief guide on setting this up is available here: https://github.com/projecthorus/horusdemodlib/wiki/1.1-Horus-GUI-Reception-Guide-(Windows-Linux-OSX)
Listeners that already have Horus-GUI installed are encouraged to update to the latest version, which is available at this link.
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
There will also be an experimental radiation sensor payload (HORUSRADMON) on 434.210 MHz (434.209 MHz USB dial frequency). If you can only receive one, prioritise the 434.200 MHz signal.
This launch will most likely be flying a FM SSTV transmitter operating on 145.100 MHz FM. It will run approximately 200mW transmit power. The transmitter will have 1 minute gaps between image transmissions to avoid overheating the transmitter. This payload last flew on Horus 59 with good results.
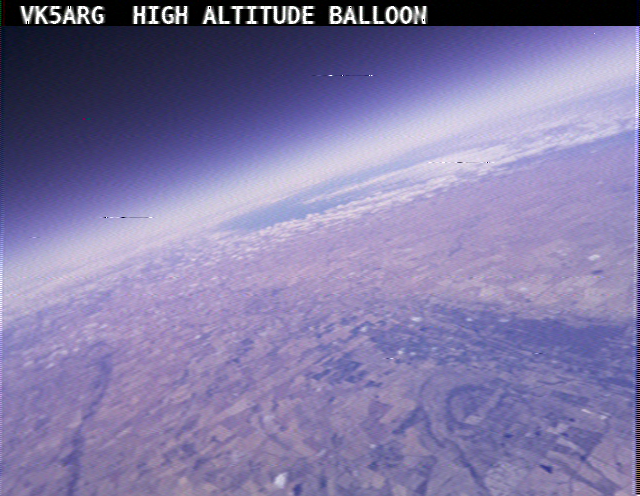
SSTV image from Horus 59
The payload will be transmitting images using the PD120 SSTV mode throughout the flight, and can be decoded using any SSTV software capable of decoding this mode (pretty much all of them!). This mode is what was commonly broadcast from the International Space Station.
Examples of suitable software you can use to decode the SSTV pictures include:
Any FM receiver (including handhelds) should be capable of receiving this payload, though as with the cross-band repeater, a Yagi antenna may be necessary for reliable reception at the edges of the transmitter footprint.
We’ve also setup a temporary 2m SSTV skimmer up at AREG’s remote HF receive site, which (if it works!) will post received images here: https://botsin.space/@aregsstv/tagged/PD120
We will have some digital certificates available for listeners that submit an image from the highest 1km of the flight (to be determined after the flight has finished). Email your images to vi25areg@areg.org.au !
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a Linux computer, a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
This payload will be trialing a PiCamera HQ, with a much larger lens. This will hopefully give us much higher quality imagery than we’ve seen previously, so long as we don’t hit focus drift issues like we have seen on previous flights.

Wenet imagery from a previous launch.
A guide on how to get set up to receive the Wenet signal is available here: https://github.com/projecthorus/wenet/wiki/Wenet-RX-Instructions-(Linux-using-Docker)
Please note the transmit frequency of 443.5 MHz, which may require listeners to re-configure their Wenet setup. Listeners who are already setup to receive Wenet should consider updating their decoding software to the latest version (Due to be released at the beginning of August 2023), with update instructions available here.
During the flight, the live imagery will be available at this link: http://ssdv.habhub.org/
![]()
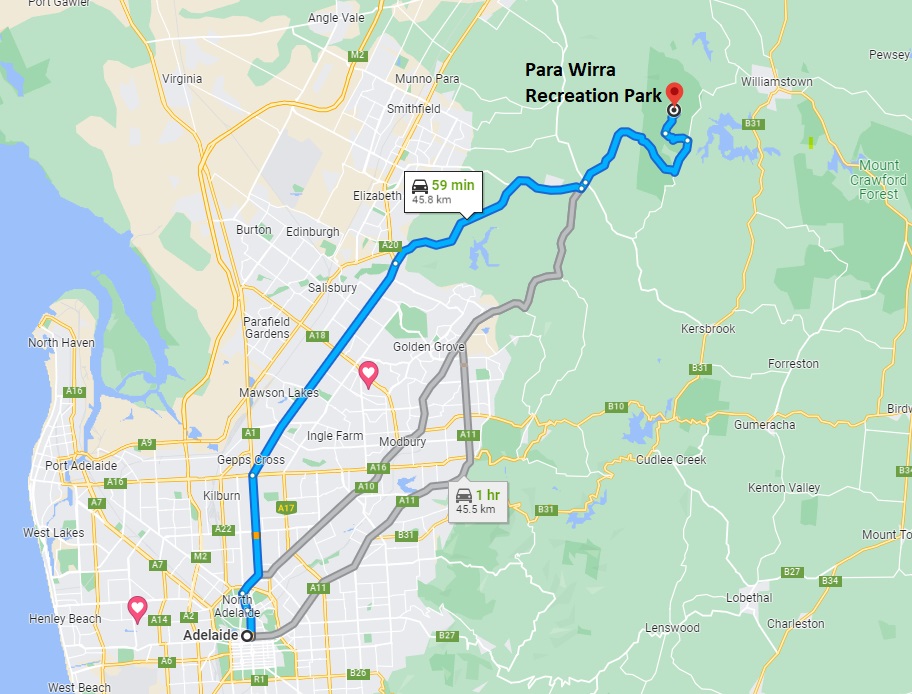
As part of the VI25AREG celebrations, AREG will be holding a picnic lunch at the Para-Wirra Conservation Park, starting around 12PM on Sunday the 30th of July. We’ve booked the ‘Bush Oval’ site, which can be found at this Google maps link. We’re planning on running a BBQ for lunch, and there’s even some talk of 25th anniversary cake!

We’re planning on activating the conservation park (VKFF-1739) on a few HF bands with some members portable HF setups – if you have a portable setup you want to try out, bring it along, there’s plenty of space.
There will also be a short Amateur Radio Direction Finding (ARDF) course setup around the area, with plenty of spare receiving equipment available for anyone that wants to have a go.
Please note that Para Wirra Conservation Park does have a vehicle entry fee, which can be paid online here.
Hope to see you there!
73 Mark VK5QI
AREGs next car-based fox hunt will be held this coming Friday the 14th of July, starting from the car park of the North Adelaide Aquatic Centre Carpark at 6:30 PM. We’ll have three foxes deployed around the Adelaide area, on both the 2m and 70cm bands, so come along and have a go!

The frequencies will be:
As usual, liaison will be on the VK5RSB Summertown 70cm repeater which operates on 439.900 (-5MHz) 91.5 CTCSS. Please come up on the repeater so we know how you are faring throughout the evening!
The event is open to anyone with radio direction finding equipment and will span most of the Adelaide metropolitan area. We would love to see you there!
73
Mark VK5QI
![]() The 27th of July is the Amateur Radio Experimenters Group’s 25th Anniversary! As a celebration of this event, we will be activating the VI25AREG special-event callsign between the 1st of July and the 31st of August. The aim is to have the call active on as many bands and modes as possible, reflecting the huge diversity of interests of AREG’s members across the whole spectrum of amateur radio activities.
The 27th of July is the Amateur Radio Experimenters Group’s 25th Anniversary! As a celebration of this event, we will be activating the VI25AREG special-event callsign between the 1st of July and the 31st of August. The aim is to have the call active on as many bands and modes as possible, reflecting the huge diversity of interests of AREG’s members across the whole spectrum of amateur radio activities.
AREG has always sought to promote experimentation in amateur radio as a pathway to learning. To celebrate this, we are offering a special award available for any station who contacts VI25AREG using a minimum of three different transmission modes. The aim being to encourage people to experiment with different modes. You will find the call in use in some unlikely places as a result, including PSK, Olivia, FreeDV, DMR, FUSION, FM, AM, HF, VHF, UHF and more. Work us on three modes and you will qualify for our award!
To apply for the certificate, just send an email to vi25areg (at) areg.org.au with your ADIF log extract showing the three qualifying QSOs. If your QSOs are found in our log, you should receive your digital certificate within a few days!
Click to request QSL Card
A special 4 sided QSL card is being designed by the members of AREG for this event. The card design will be completed by August 31st (aligned with the close of the celebrations). Requests for a copy of the card can be submitted via our QSL Manager, Charles M0OXO. You can also see whether you are in the log via Clublog!

Look out for VI25AREG on the following bands and modes over the next few weeks, and check back on our website often for specific activity announcements!
We are hoping to get many of our members on air operating the callsign.
Formed back in July 1998, AREG started out with 7 members focused on amateur radio and electronics experimentation. There were early projects driven by interests in high altitude balloons and repeaters and the group started some early fund raising efforts to support these.
Over time the group continued to slowly grow through until ~2010 when larger activities were attempted, including efforts in various contests and operating on air using special event call VI5MCP (100th anniversary of Morialta Conservation Park). Around this time, the group moved from meeting at members homes to the Reedbeds Community Centre in Fulham too, and the groups focus began to broaden and look to engage more actively with the wider amateur radio community. In the last ~15 years, the group has gone from strength to strength, partnering with the Project Horus high altitude balloon team, being very active in radio contesting, began providing community service communications for the River Paddling Marathon in the Riverland and establishing many new services for members, growing the club’s reach through its internet presence in the process.


")








")

")



")

")
")

From our original 7 members, the group has now grown in size to well over 100 people located across 6 states. With that base, AREG continues to seek opportunities to make a positive contribution to the amateur service in Australia. We therefore are now celebrating the past 25 years and are looking forward to the next 25!
We look forward to working you from VI25AREG!
AREG regrets to advise that due to the proximity of the usual monthly fox hunt date to the Riverland Paddling Marathon (where many AREG members will be heading to), the June fox hunt will not be going ahead.

Stay tuned for details regarding our July hunt, to be posted here closer to the date.
73 from AREG!
{kind=link}