UPDATE: Thanks to all that helped out with this launch! 30 stations helped receive the Horus Binary telemetry, and 7 received the Wenet imagery. A writeup of this flight will be finalised in due course.
The AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 15th of January, with a planned launch time of 10 AM ACDT.
This launch will most likely be performed from the Auburn Community Oval, with the launch team arriving on site from around 9:15 AM. Spectators are welcome!
This launch aims to flight-test some experimental payloads which will be utilised in the upcoming Southern Hemisphere Space Studies Program. Further information on this program is available at the end of this article.
Tracking of the flight will be via the SondeHub-Amateur tracker, available by clicking this link. There will also be live imagery transmitted throughout the flight (refer further below for decoding details), available here.
A live data dashboard showing telemetry from the various payloads will be available during the flight at this link.
Primary Telemetry – 434.200 MHz
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
Listeners that already have Horus-GUI installed are encouraged to update to the latest version, which is available at this link.
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
An experimental radiation sensor payload, using a Geiger-Muller Tube, will also be launched on this flight. This will be transmitting on 434.210 MHz, also using the Horus Binary 4FSK data mode. The aim of this payload is to investigate the variation in radiation exposure throughout the flight.
This telemetry can be decoded using the same Horus-GUI software as the primary telemetry. Note that you will need to use a USB ‘dial’ frequency of 434.209 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a Linux computer, a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
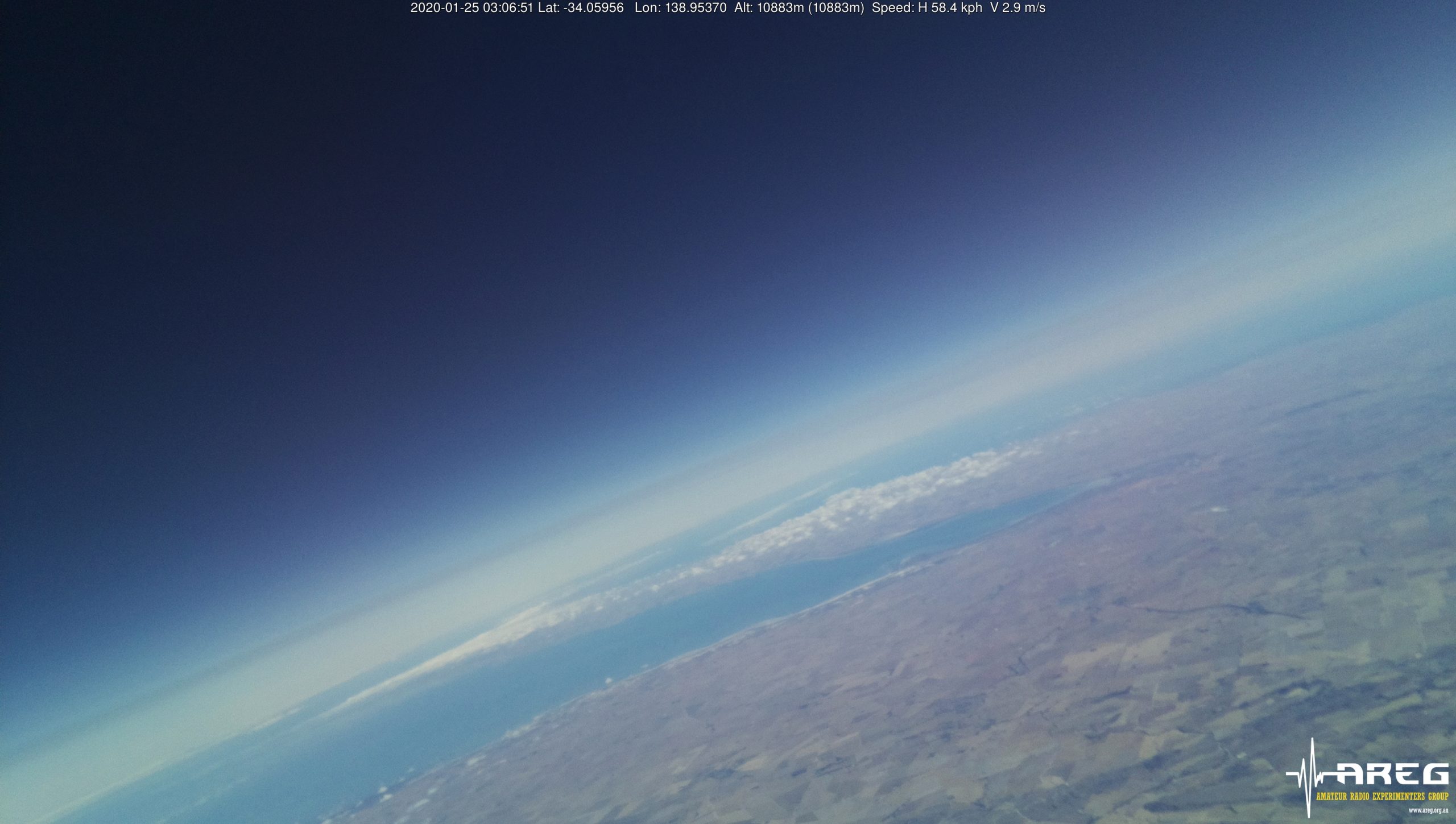
This flight will be testing a downward-facing camera with a 780nm long-pass Infra-Red filter, which will highlight areas of healthy vegetation.
Infra-Red Filtered Imagery from a previous flight, with white areas indicating vegetation. The parklands surrounding the Adelaide CBD are clearly visible.
Please note the transmit frequency of 441.2 MHz, which may require listeners to re-configure their Wenet setup. Listeners who are already setup to receive Wenet should consider updating their decoding software to the latest version (December 2022), with update instructions available here.
As a late addition, there will be a second imagery payload running on 443.500 MHz. This is a re-flight of our usual imagery payload, with the cameras pointing towards the horizon. Hopefully we can capture some images of the Riverland from this payload.
If you have the capability of running 2 receivers, please consider receiving this payload as well, but please prioritise receiving the payload on 441.200 MHz.
Southern Hemisphere Space Studies Program Launch – Late January 2023
AREG is pleased to once again be involved with the International Space University’s Southern Hemisphere Space Studies Program hosted by the University of South Australia. AREG members will be running a High-Altitude Balloon project as part of this course, culminating in a High-Altitude Balloon launch, currently planned for the 28th of January 2023 from the Auburn area.
This launch will be flying multiple payloads, including:
2x Horus Binary Telemetry Payloads, most likely on 434.200 MHz and 434.210 MHz (same as Horus 58)
A downward-looking Wenet imagery payload on 441.200 MHz.
A horizon-looking Wenet imagery payload on 443.500 MHz.
Given the many payloads on this flight we would greatly appreciate the assistance of the local amateur radio community in receiving telemetry! In particular, the more Wenet receiver stations we have running the higher the chance of downlinking complete images from the two imagery payloads.
Horus 57 was the first ‘large’ Project Horus high-altitude balloon launch in over a year, and was aimed at getting more stations involved in receiving the common telemetry and imagery systems used on our launches, and at the same time try and get some nice imagery of our state from the air!
The launch was originally scheduled for the 1st of May, but weather conditions resulted in the imagery launch being bumped a week, and a small telemetry launch taking its place. The telemetry-only flight was very well received, with 37 unique stations contributing telemetry, building anticipation for the full-scale launch, which was performed on Saturday the 7th of May at 10AM.
The Payloads: Wenet Imagery
The main payload on this launch was a Wenet imagery payload. Wenet is an imagery downlink system first developed by David VK5DGR and Mark VK5QI in 2016, to enable high resolution imagery to be downlinked from a balloon launch. It uses Frequency Shift Keying (FSK) at 115kbit/s to send specially encoded JPEG images which can be reassembled from packets received by many spatially diverse receivers. It’s also completely open source, so anyone can have a go at using it!
This particular Wenet payload was testing a camera lens made by ArduCam, in the hope of obtaining higher quality imagery. Unfortunately this lens de-focused as the temperature of the payload dropped during flight, resulting in many blurred images. We’ll be switching back to the tried-and-tested Raspberry PiCam v2 for future flights of this payload.
The Payloads: Tracking & Flight Management
The flight also included the usual complement of telemetry and flight management payloads. Primary telemetry was provided by a reprogrammed RS41, transmitting the ‘Horus Binary‘ 4FSK mode on 434.200 MHz. This was received by a large number of amateur stations running the ‘Horus-GUI’ demodulation software. Tracking of the payload was available on the SondeHub-Amateur tracker online, allowing global access to the position of the balloon throughout the flight.
The separate flight management payload was a LoRa-based payload operating in the 70cm amateur band. This payload allows remote termination of the flight if necessary (and it was very nearly used on this flight!).
The Payloads: LoRaWAN Beacon
Also on this flight was an experimental LoRaWAN tracking payload built by Liam VK5LJG. The aim was to transmit position beacons into ‘The Things Network‘ (‘TTN’), which has gateways (receiver stations) in many locations across Australia. This payload previously flew on Horus 55.
The payload operated on the 915-928 MHz LIPD band, with a transmit power of ~50mW. The hardware was a RAK Wireless RAK5205 board, running custom firmware for the flight. Position updates were only sent every ~3 minutes to comply with TTN fair-usage guidelines.
Unfortunately this payload stopped being received approximately 30 minutes into the flight, due to a misconfiguration. We’ll try this again on another flight!
Launch!
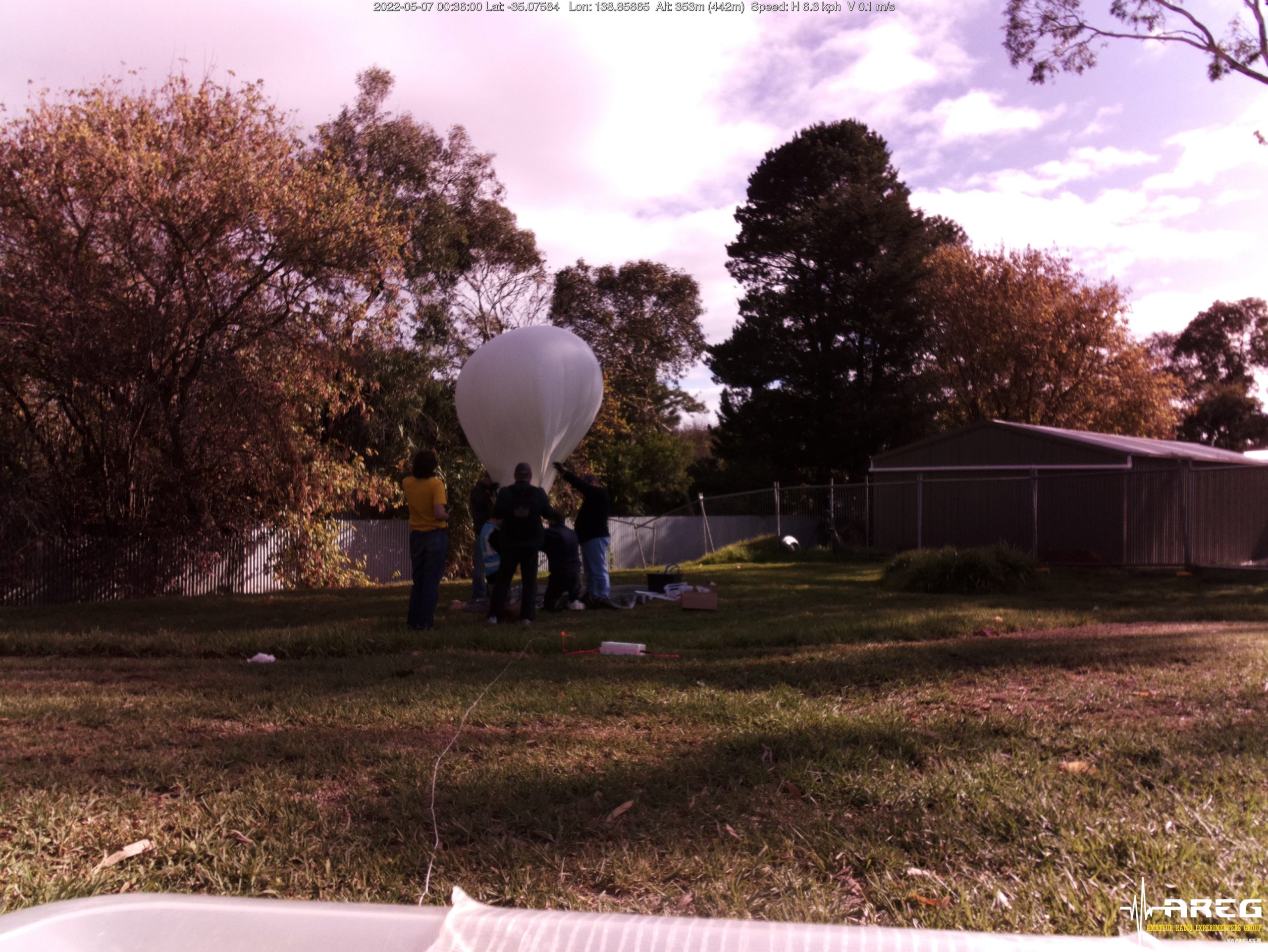
The launch crews arrived on-site at the Mt Barker High School oval around 9AM on the Saturday morning, and started preparations for launch. The entire preparation process through to launch was documented by AREG club member Iain VK5ZD:
This flight used a Hwoyee 1600g balloon, one of the largest balloon sizes we regularly use. Since the combined payload mass was relatively light (~600g), a relatively small amount of gas was required, resulting in the balloon being quite under-inflated, and prone to wind drag.
Immediately after launch, it was noted that the ascent rate was lower than the expected 5 m/s, a direct result of the increased drag on the under-inflated balloon.
Thanks to all that helped out at the launch site! It was great to see some new faces, and the many hands made the launch much easier.
Starting the Chase
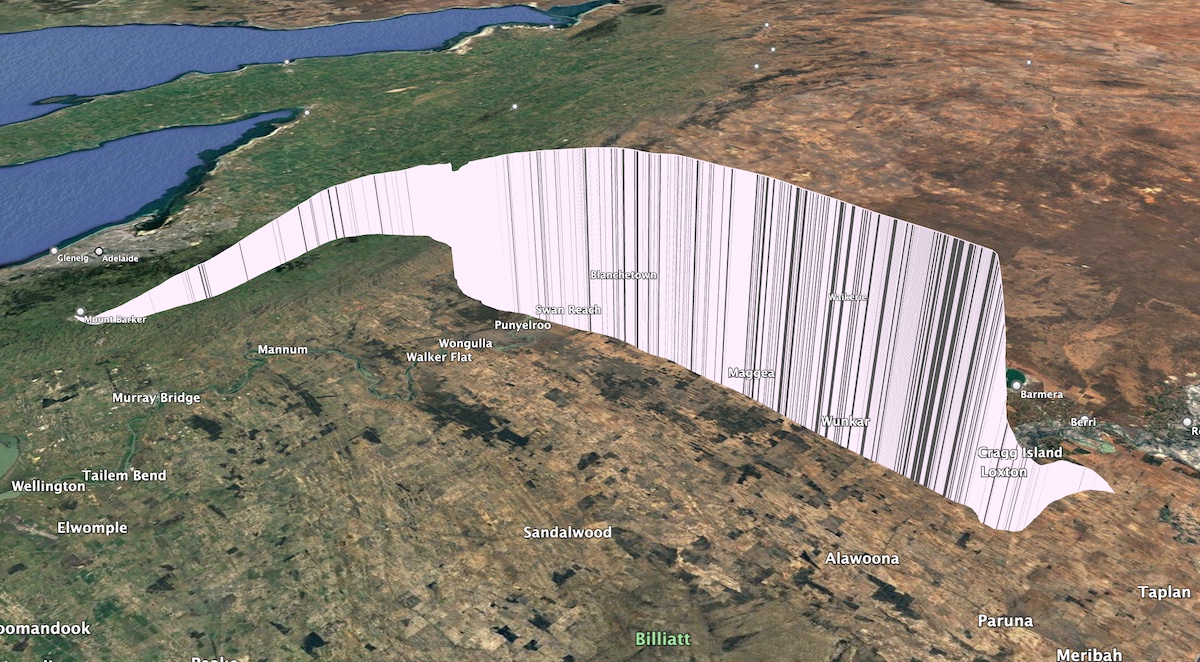
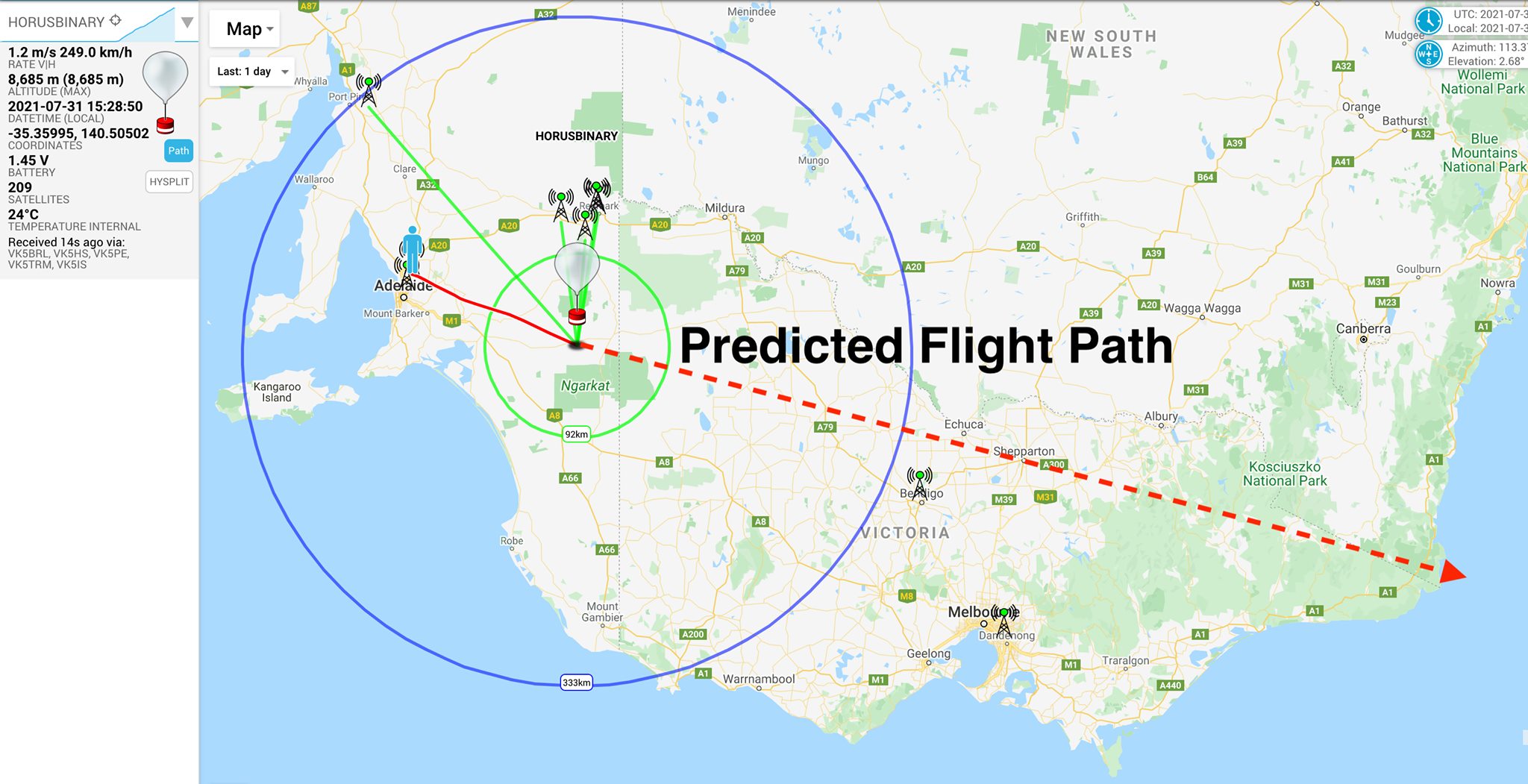
Original Horus 57 Flight-Path Prediction
The original flight path prediction had the flight landing somewhere off the Stott highway, between Swan Reach and Loxton. However, the slower than expected ascent rate after launch meant the live flight-path predictions began to move further to the east.
The chase teams for the day consisted of Mark VK5QI and Will VK5AHV, and Gerard VK5ZQV.
The chase teams immediately headed off towards Swan Reach, and met up with some members of the Riverland Radio Club who had setup a receiving station for the imagery payload near the locality of Maggea. Peter VK5PE, Colin VK5CBM, Andy VK5LA, and Ivan VK5HS with his grandson Reece had decided to head out to setup near the predicted landing area and have a go at receiving imagery. This was their first time receiving the Wenet imagery payload, and so had brought along a lot of equipment to experiment with!
Riverland Radio Club Portable Receiving Station
There was also many other stations that had gone portable to receive the Wenet imagery. Peter VK5KX was setup near Sanderston with a WiMo X-Quad antenna and tracking rotator system, and Andrew VK5LA setup north of Swan Reach with a 15-element yagi. Andrew VK5CLD was also setup near Mt Barker summit with a homebrew 8-element yagi.
This slideshow requires JavaScript.
Burst & Recovery
As the flight progressed, the reported altitude reached the expected 38000 m, and kept on rising! Unfortunately for the chase teams, at this altitude the balloon and payloads were heading east at 150 kph, and the predicted landing location with it, and so they had to get back on the road and continue onwards.
There was a tense period as the predicted landing location moved right across the Murray River, before finally moving further onwards to the east of Loxton. Around this time the flight continued on upwards, passing through 39000 m altitude, then finally 40000 m.
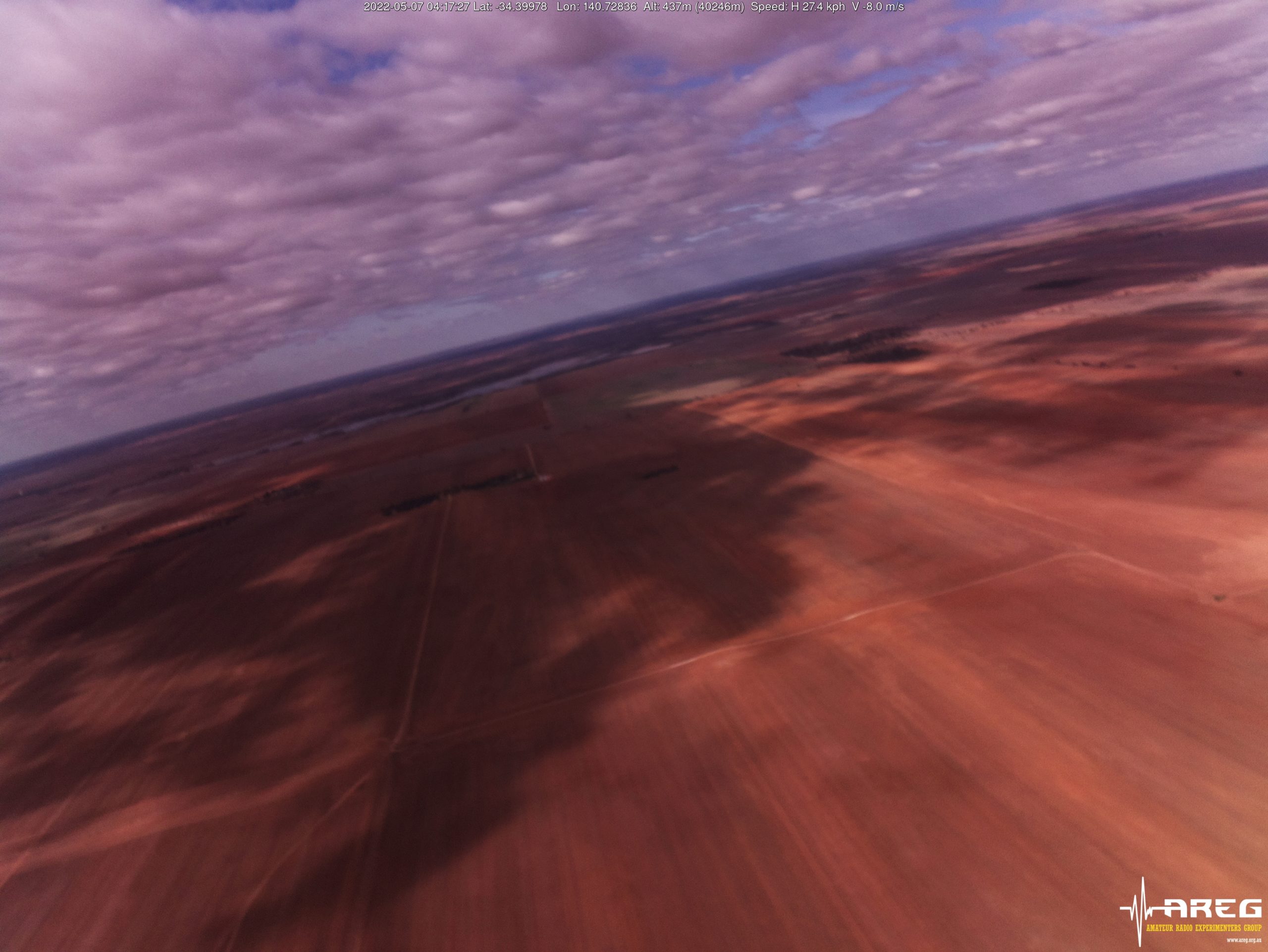
The ascent rate slowed down considerably above 40 km altitude, and there was a short time when the use of the cutdown payload was seriously considered to avoid the payloads ending up across the Victorian border. This ended up not being necessary though, as the balloon burst for a maximum reported altitude (based on the Wenet telemetry) of40246 m! This is most likely the highest altitude ever reached by an amateur balloon launch in Australia!
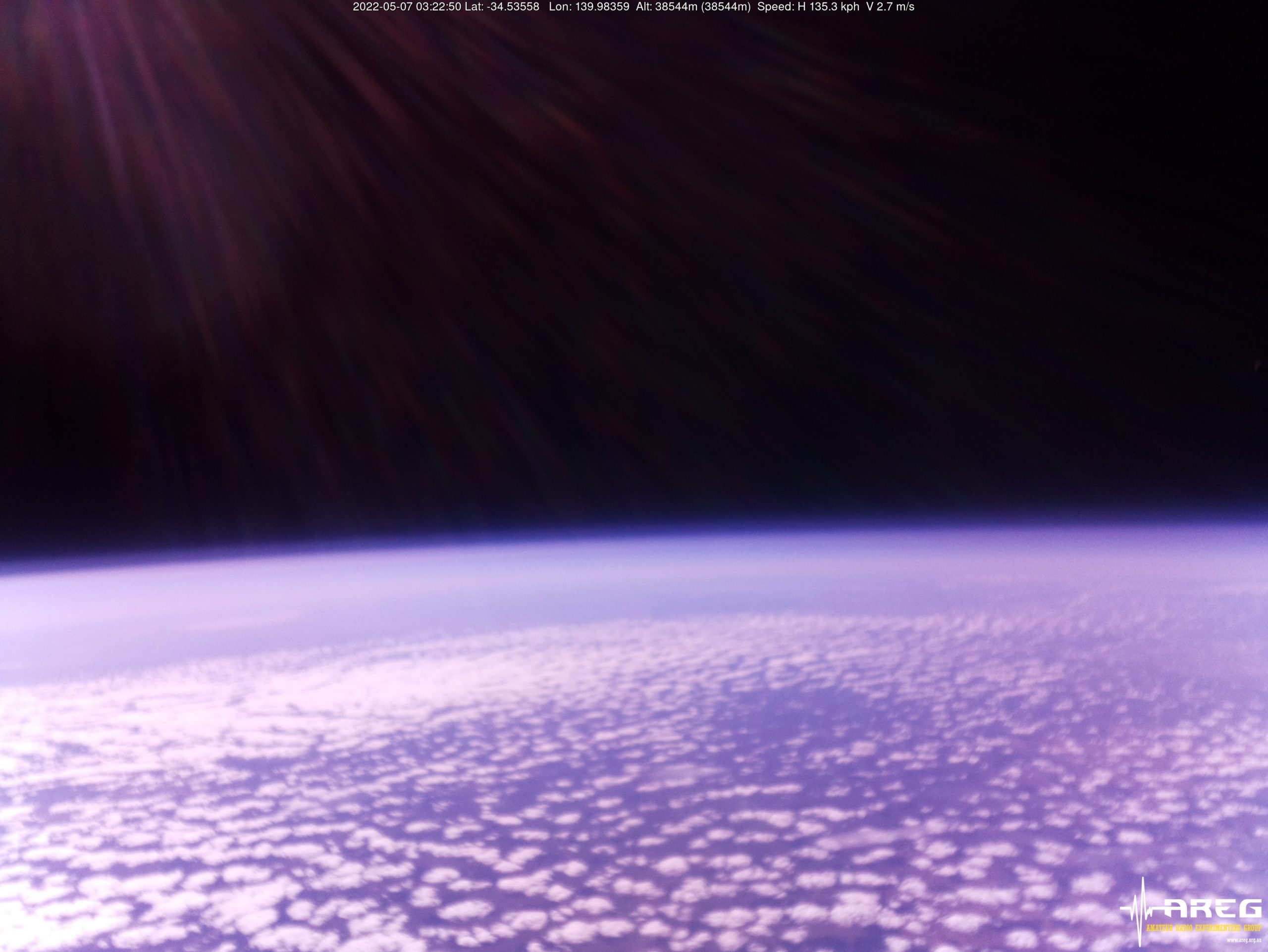
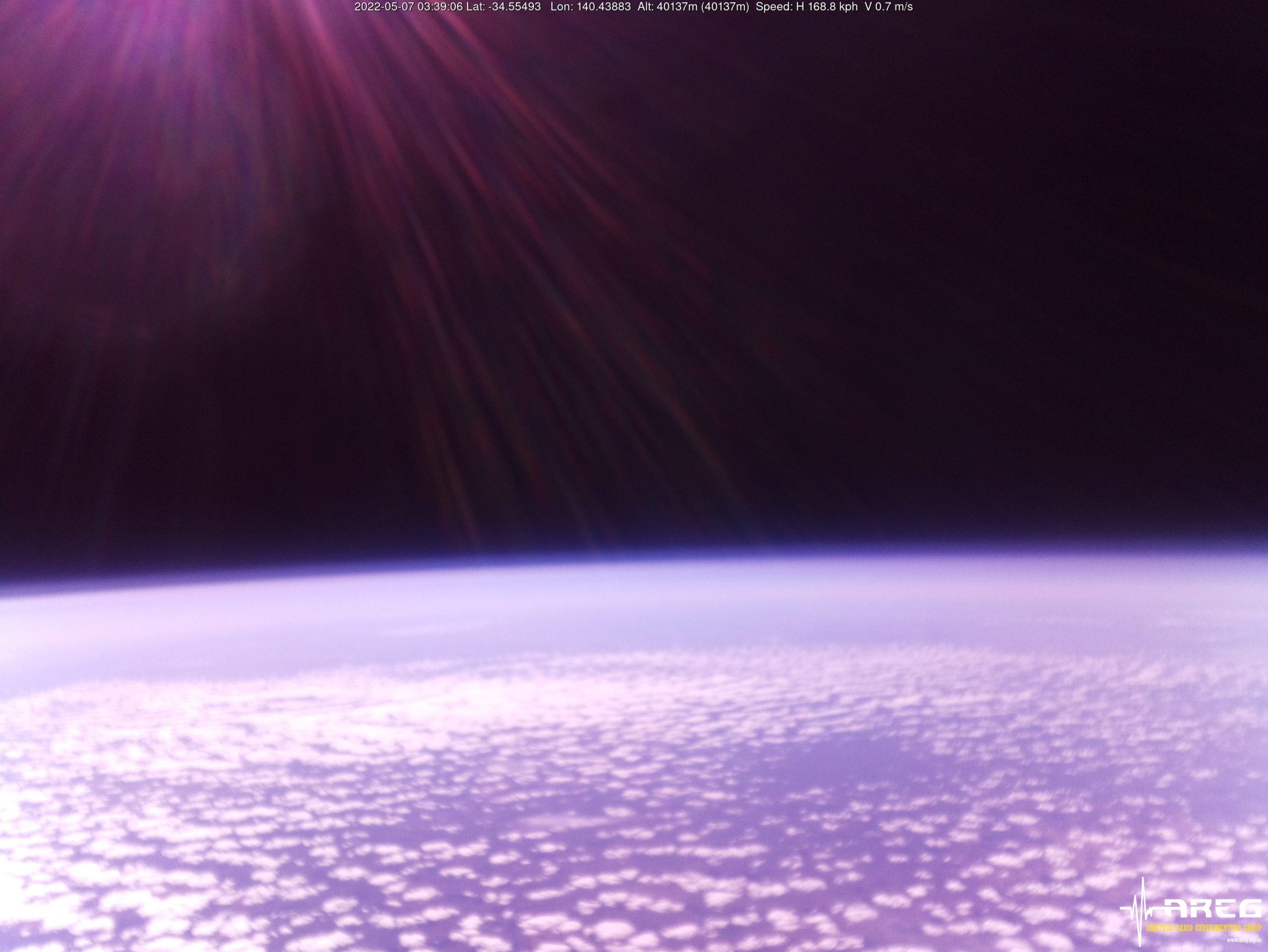
Wenet Imagery from 40205m altitude!
The payloads then began to plummet back to earth (a peak descent rate of 114 m/s was observed just after burst!) and ended up landing in a newly seeded paddock approximately 15 km to the north-east of Loxton.
Horus 57 Flight Path
After obtaining permission from the landowner, the chase teams were able to carefully drive into the paddocks and recover the payloads.
The Wenet imagery payload was still operating, and captured the recovery and walk back to the car:
Wenet Imagery!
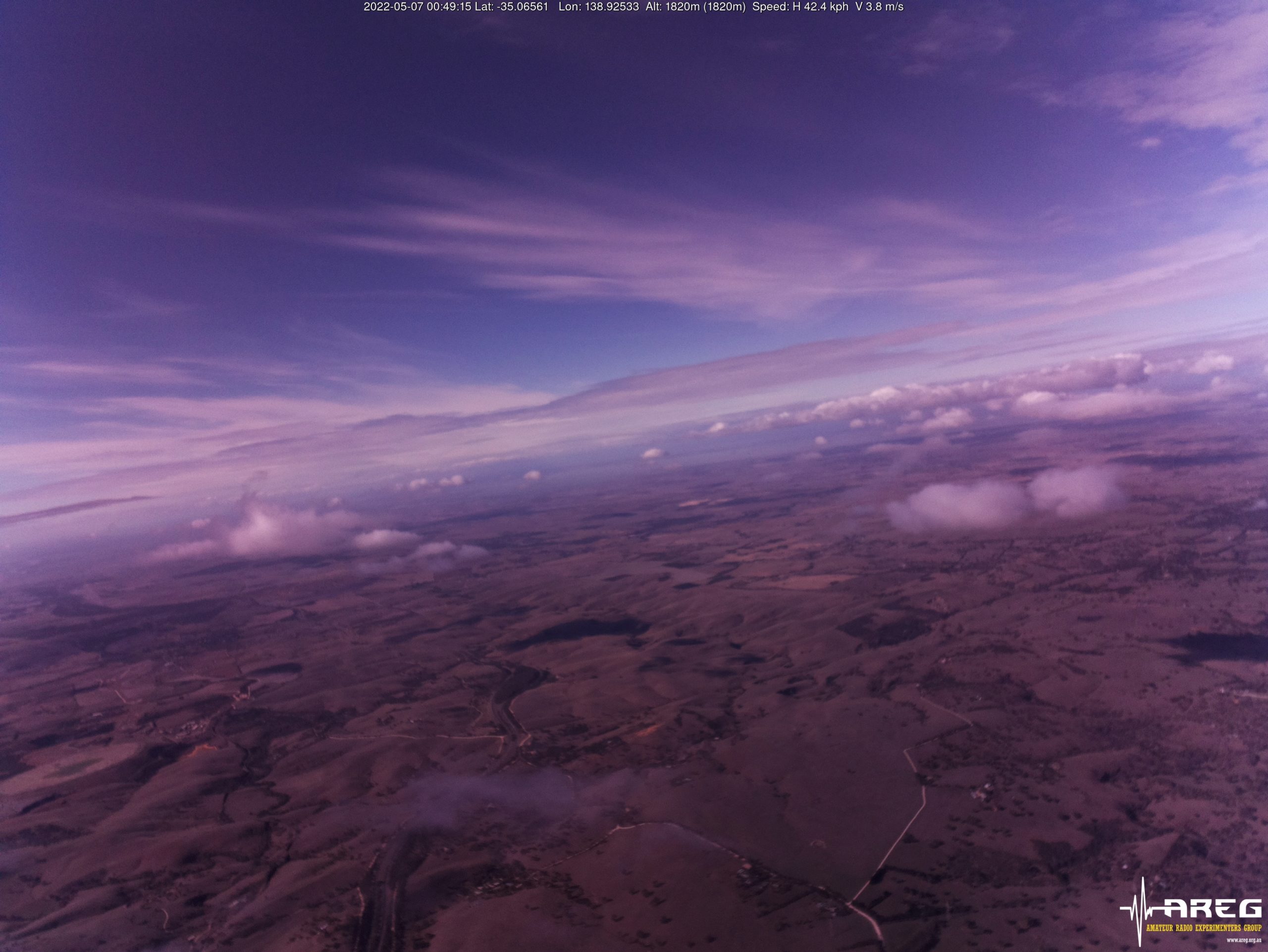
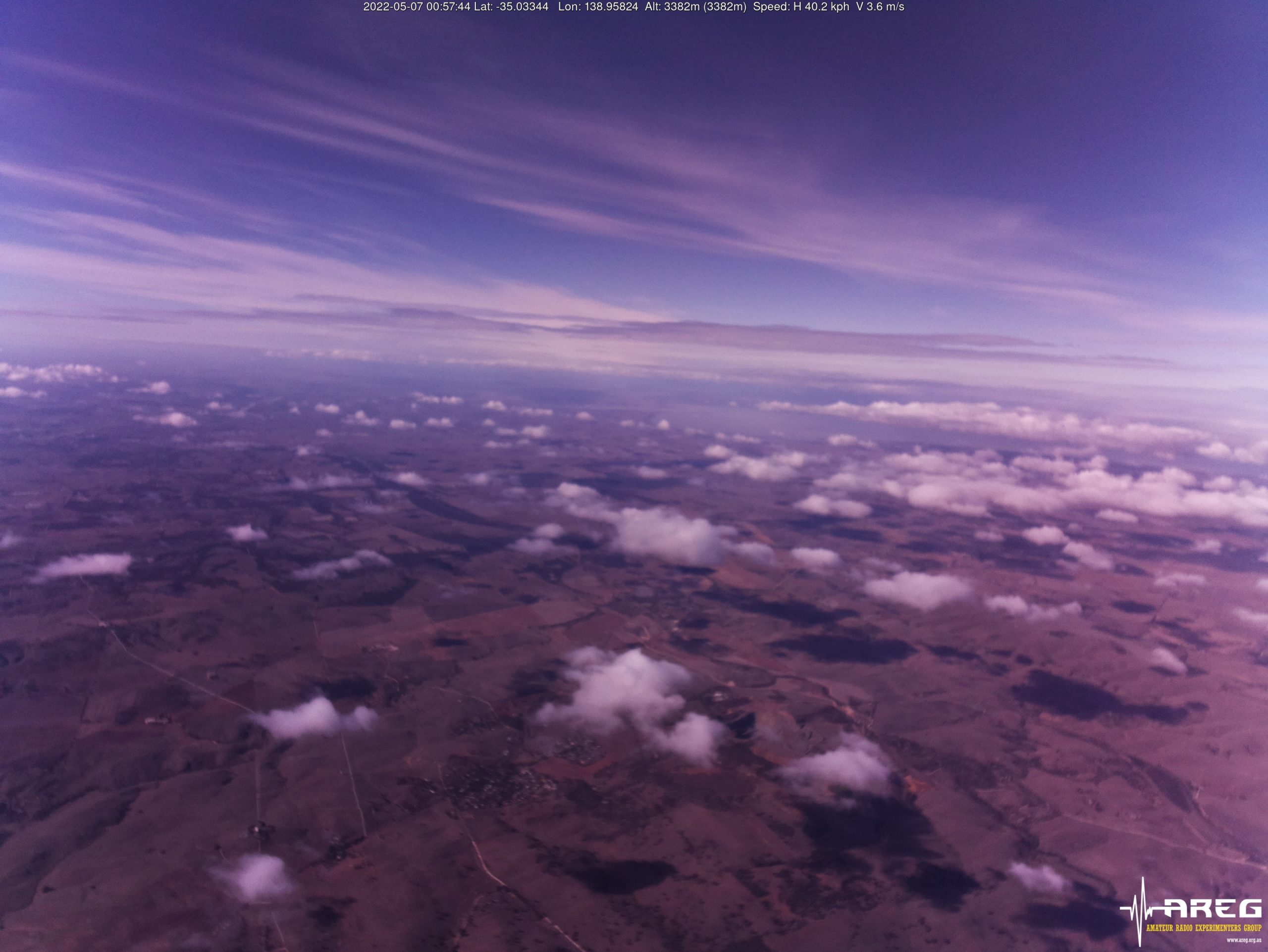
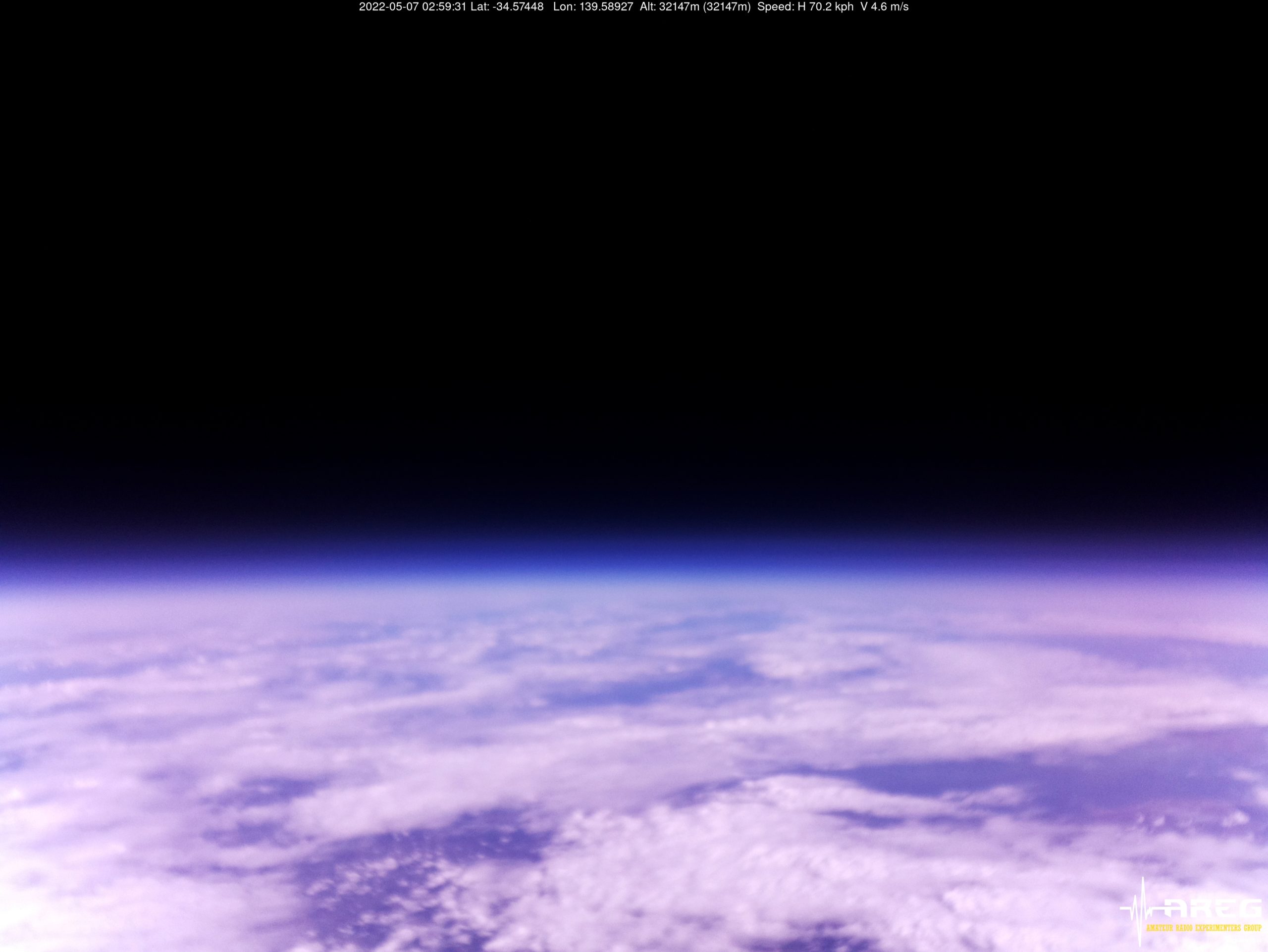
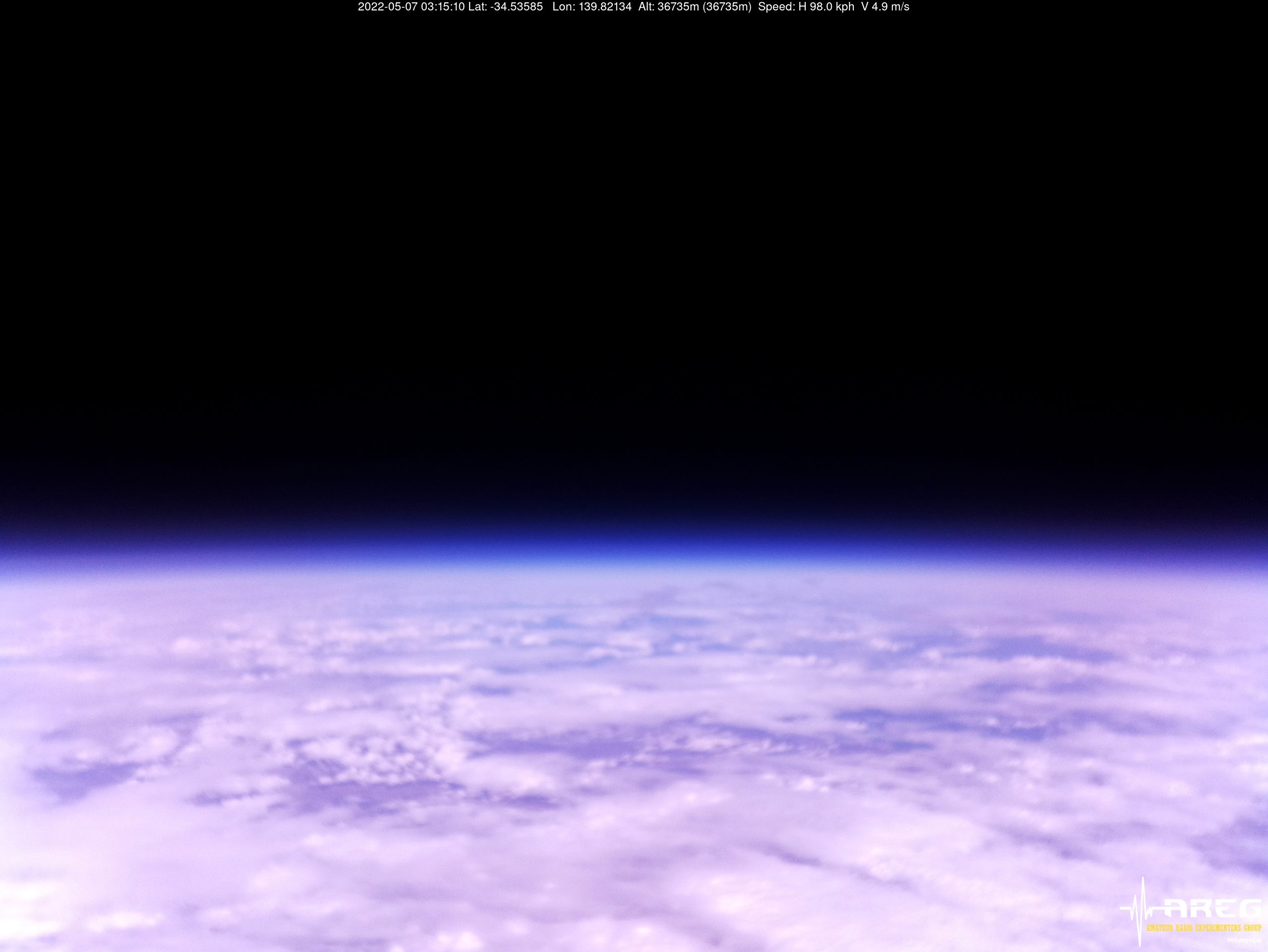
All the way through the flight, the Wenet payload continued to transmit live imagery to many receiving stations around the state. Unfortunately the new ArduCam lens shifted in focus due to the extreme cold temperatures experienced during the flight, resulting in most of the imagery above 3 km altitude being blurred. The lens appeared to recover around the peak of the flight, but then degraded again on descent before recovering after landing:
Wenet Imagery from 40205m altitude!
Wenet Reception Statistics
This flight saw the highest number of Wenet receiver stations ever, with 14 separate receiving stations contributing imagery packets. As a result, we had 100% image reception over the vast majority of the flight! This is a great result, and allows those watching from home to experience our high-altitude balloon launches in near real-time.
The following amount of data was contributed by each station:
VK5LA: 205297 packets (50.12 MB)
VK5KX: 179744 packets (43.88 MB)
VK5QI-1 (Home): 160507 packets (39.19 MB)
VK5CBM: 145899 packets (35.62 MB)
VK5PW: 134465 packets (32.83 MB)
VK3TNU: 134264 packets (32.78 MB)
VK5APR: 157585 packets (38.47 MB)
VK5EME: 146062 packets (35.66 MB)
VK5QI (Mobile): 131933 packets (32.21 MB)
VK5HS: 104472 packets (25.51 MB)
VK5CLD: 47650 packets (11.63 MB)
VK5IS: 21995 packets (5.37 MB)
VK5TRM: 16950 packets (4.14 MB)
VK5FJGM: 5355 packets (1.31 MB)
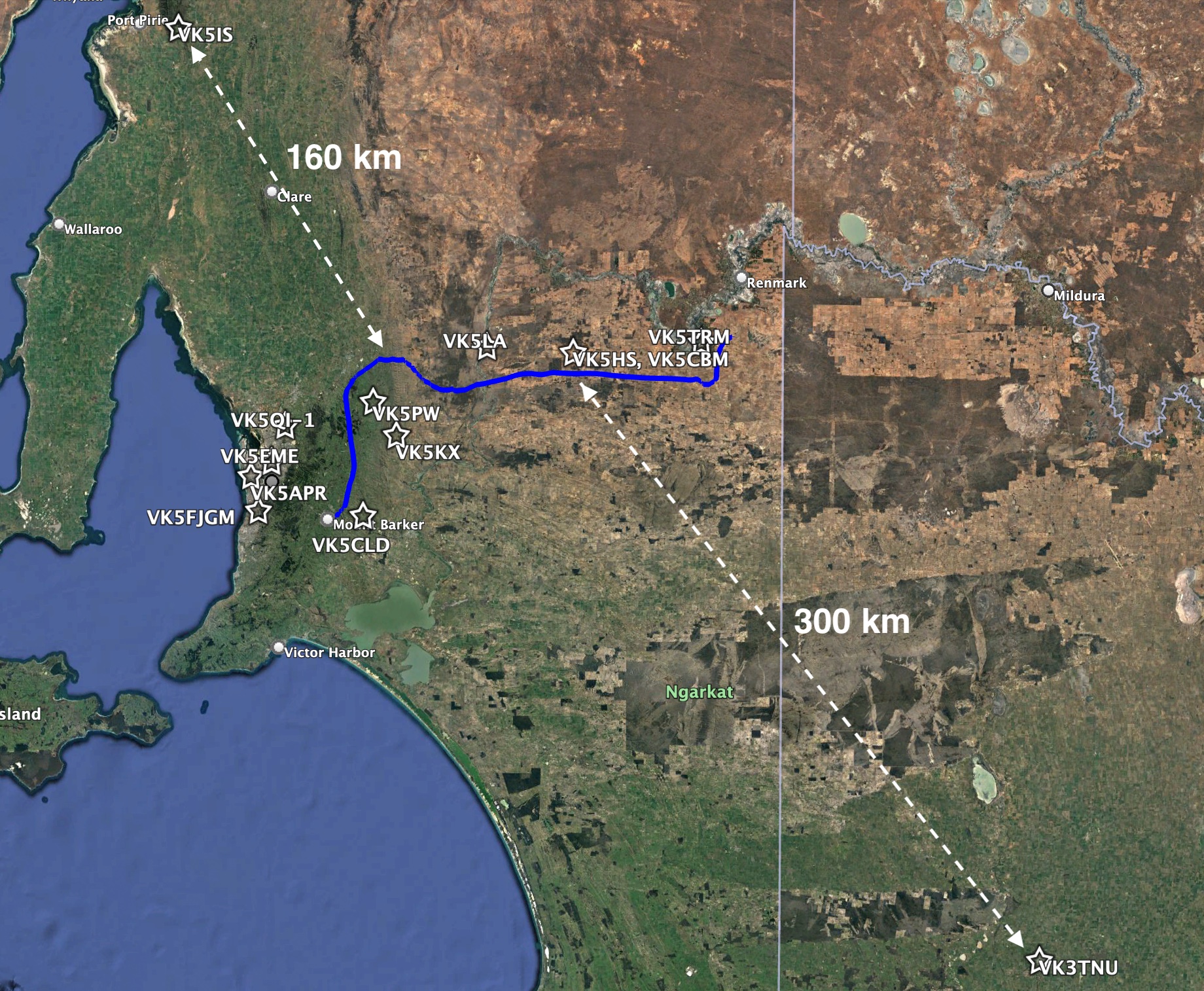
Horus 57 Wenet Receiver Map
While most of the receiver stations were relatively close to the flight path, we also saw Ian VK5IS receiving from 160km away, and Tim VK3TNU receiving from over 300km distance! Tim was using a 9-element RFI yagi, paired with a RTLSDR and preamplifier, and has set the new record for Wenet reception distance!
The following plots show the percentage of each image that was received by each receiver station:
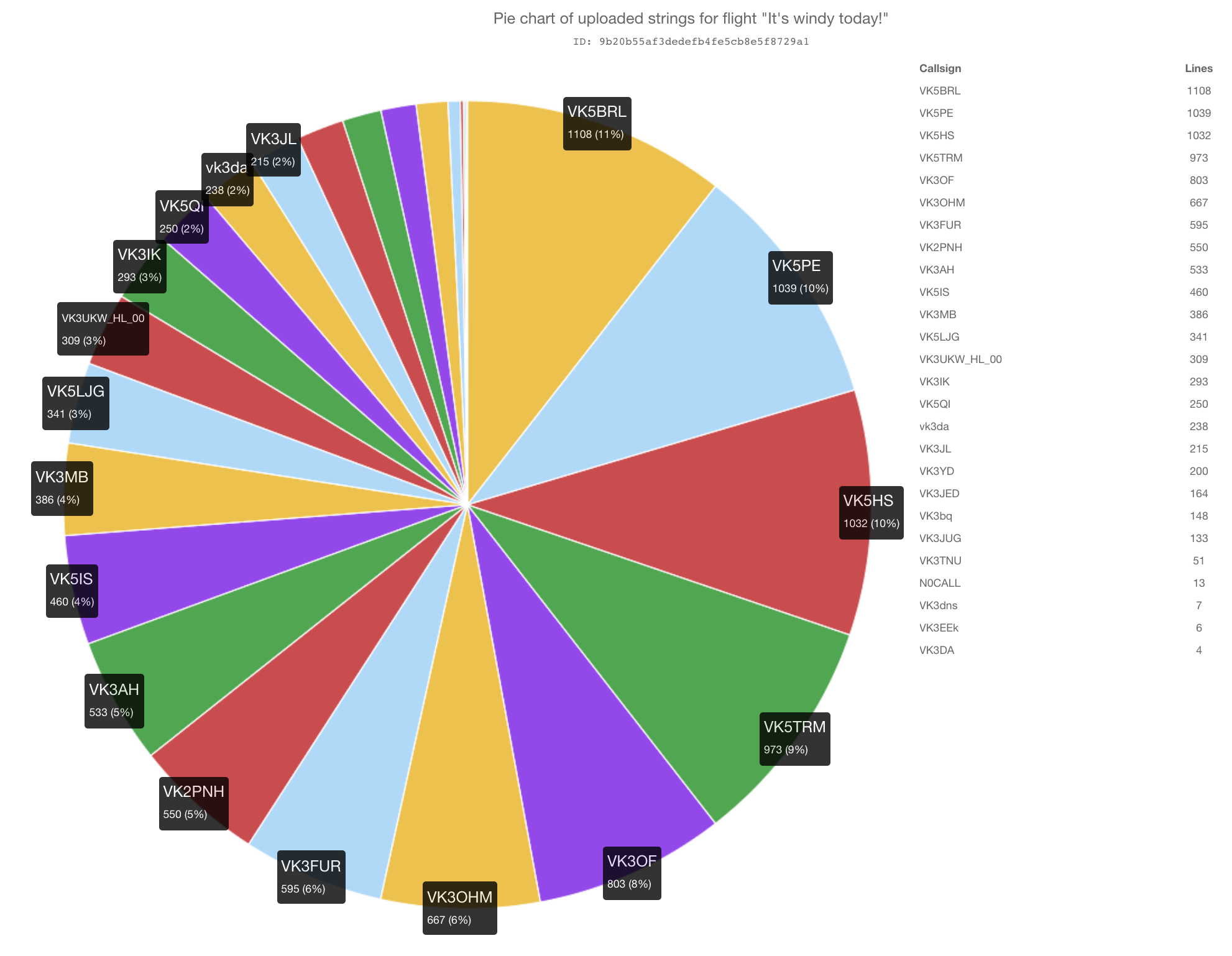
We also saw a huge number of Horus Binary receiving stations come online for this flight, with stations as far away as Melbourne contributing telemetry. A total of 41 unique callsigns were observed to upload telemetry throughout the flight, which is also a new record for a Project Horus launch!
A huge thanks to everyone that contributed to the flight tracking, and we hope to see you on the map on future launches!
Detailed statistics for each receiver are available in the table below:
Callsign
Received Packets
Percentage of Flight Received
First-Received Altitude (m)
Last-Received Altitude (m)
VK3BQ
346
14.0%
28056
22885
VK3DNS
88
3.6%
34109
38312
VK3EEK
45
1.8%
33822
36313
VK3ER
5
0.2%
34374
34470
VK3GP
156
6.3%
32298
5773
VK3IRV
224
9.1%
38516
35917
VK3KZM
153
6.2%
37802
35134
VK3MD
496
20.1%
30032
25910
VK3MTV
1964
79.5%
5740
1233
VK3TNU
1755
71.1%
7858
5469
VK3TOS
123
5.0%
33418
26680
VK5AKH
136
5.5%
1529
35569
VK5AKK
2327
94.2%
366
2674
VK5APR
1879
76.1%
1062
7080
VK5BRL
552
22.4%
39251
103
VK5CBM
910
36.9%
11305
34184
VK5DJ
1668
67.6%
5920
7698
VK5DMC
1165
47.2%
4678
29733
VK5EI
1627
65.9%
6025
22298
VK5FD
2180
88.3%
1074
7979
VK5FJGM
2075
84.0%
951
10397
VK5GA
2037
82.5%
1268
16657
VK5GY
1981
80.2%
2838
8713
VK5HI
2187
88.6%
978
6851
VK5IS
2084
84.4%
1568
5469
VK5KX
2418
97.9%
645
369
VK5LA
2374
96.2%
790
1011
VK5LJG
2178
88.2%
523
8136
VK5LJG-9
1292
52.3%
854
3455
VK5LN
1770
71.7%
4401
14119
VK5MAD
560
22.7%
854
9830
VK5MAS
388
15.7%
16694
40115
VK5NEX
1972
79.9%
3055
7659
VK5NTM
2360
95.6%
1189
655
VK5PE
1633
66.1%
2685
39540
VK5PE-9
1525
61.8%
7485
747
VK5QI-1
1935
78.4%
1529
10201
VK5QI-9
2071
83.9%
344
58
VK5RK
1576
63.8%
9645
6597
VK5RR/VK5FO
1891
76.6%
2536
369
VK5ST-0
2084
84.4%
2587
5348
VK5ST-991
1306
52.9%
3255
38937
VK5TRM
2354
95.3%
1402
103
VK5TRM-12
32
1.3%
36821
37624
VK5ZAI
1722
69.7%
8895
4908
VK5ZSH
678
27.5%
5549
39972
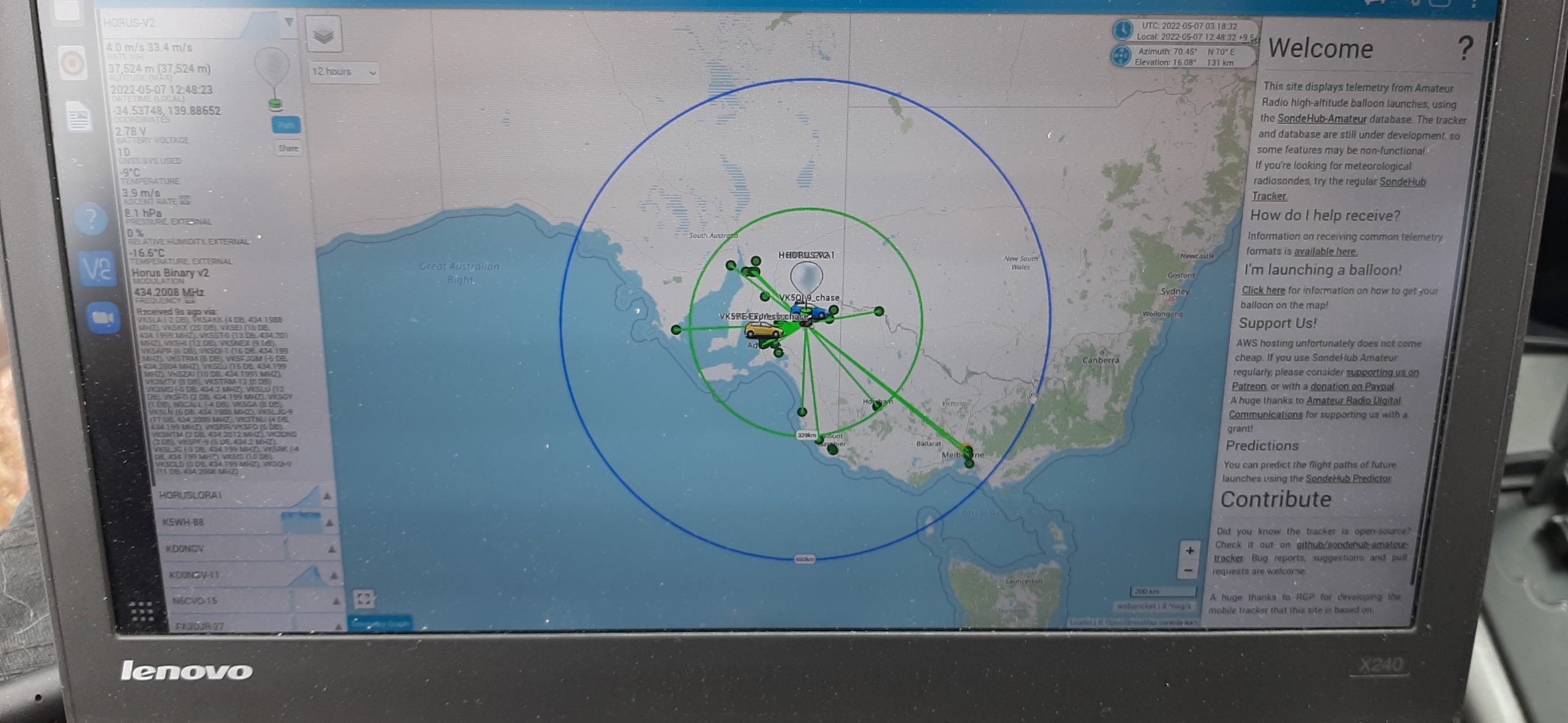
The SondeHub-Amateur Tracker
Horus 56 and 57 made use of the new SondeHub-Amateur tracker website to enable anyone online to follow the flight’s progress. This is an extension to the SondeHubRadiosonde tracker, which allows tracking of meteorological radiosondes, and is developed by club members Michaela VK3FUR and Mark VK5QI, along with many other contributors.
The SondeHub-Amateur tracker in action during Horus 57.
The next large Horus launch will likely be a re-flight of the DVB-S payload flown on Horus 55, with an improved payload antenna. This will likely need to wait until after winter, for clearer skies.
In the meantime, there are some initial plans for:
A re-flight of the LoRaWAN payload, though not to as high an altitude as on this flight.
Experiments with new sensors attached to our primary tracking payload.
Another Wenet flight, to give some more opportunities for listeners to refine their receiver setups.
Update Sunday 1st May: This telemetry-only launch was a great success, with many new stations contributing telemetry! There will be a separate post with information on the flight. We are still planning to perform the imagery flight next weekend, hopefully avoiding Mothers Day.
The AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 1st of May, with a planned launch time of 10 AM.
Updated Saturday 30th April
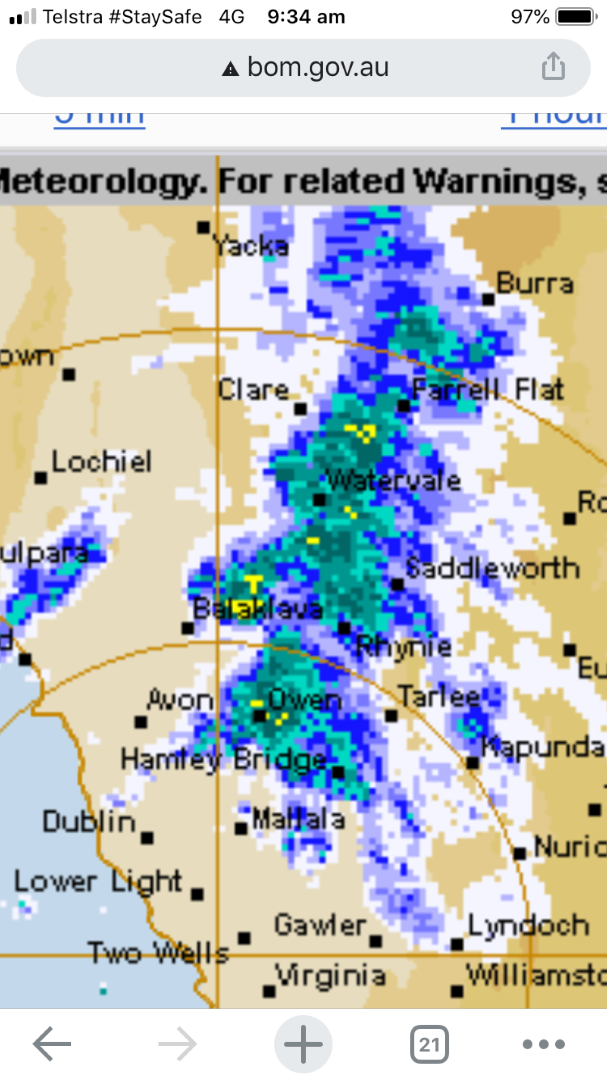
Due to adverse flight path predictions and cloud cover forecasts, the full imagery launch will not occur on Sunday the 1st of May, and will be postponed to the following weekend, (the exact day TBD) conditional on better weather forecasts.
However, since we have a NOTAM (NOtice To Air Missions) approved for the 1st of May, we will make use of it and do a telemetry-only launch, flying a single 70cm telemetry beacon. We are aiming for a maximum altitude of around 27km.
This is a great opportunity for those who have never tracked a Project Horus launch before to get setup to receive telemetry prior to the full-scale launch the following weekend. See below for information on how to receive the telemetry payload.
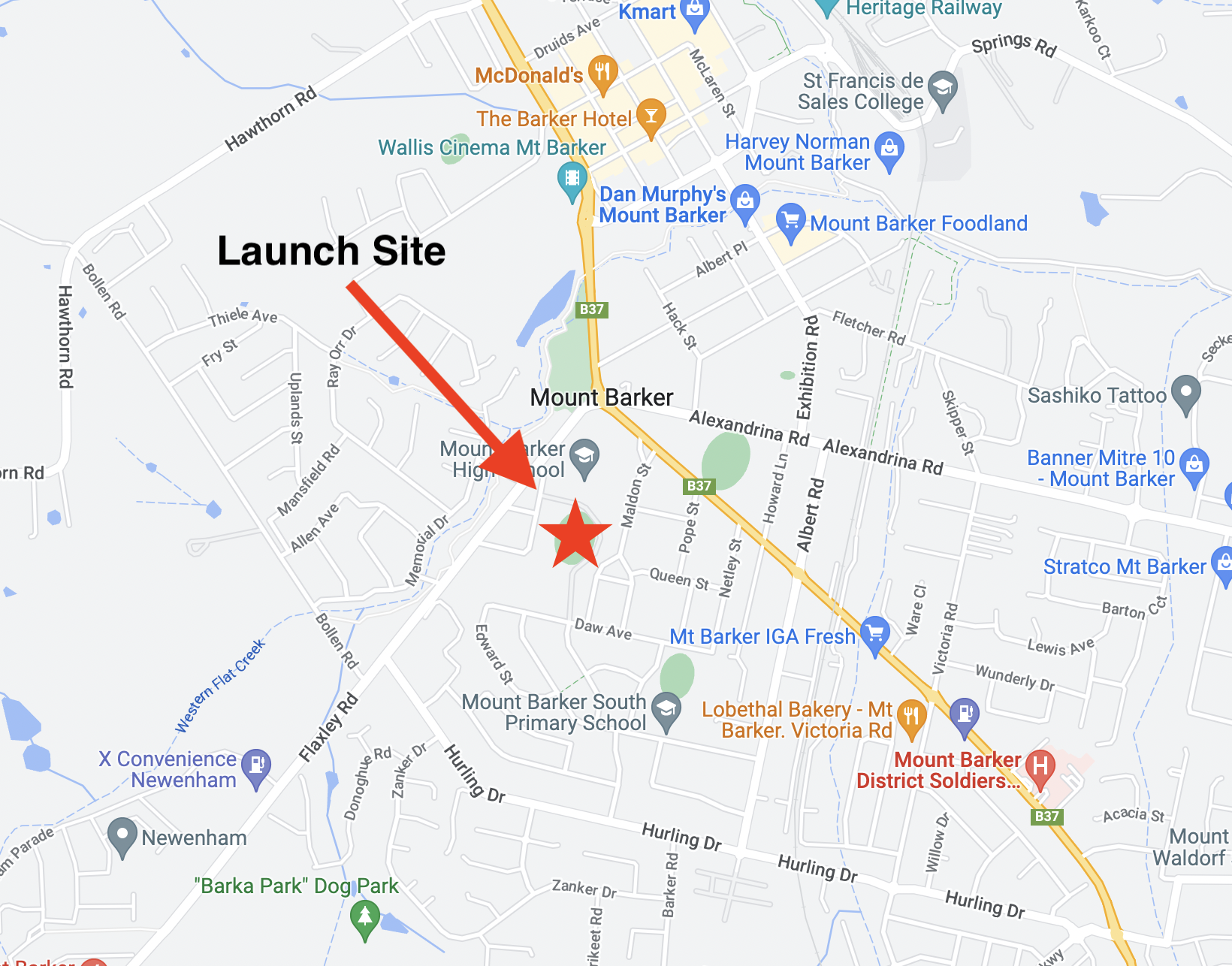
We will now be launching from the Mt Barker High School Oval, with the launch team on-site from approximately 9:30AM. Visitors are welcome!
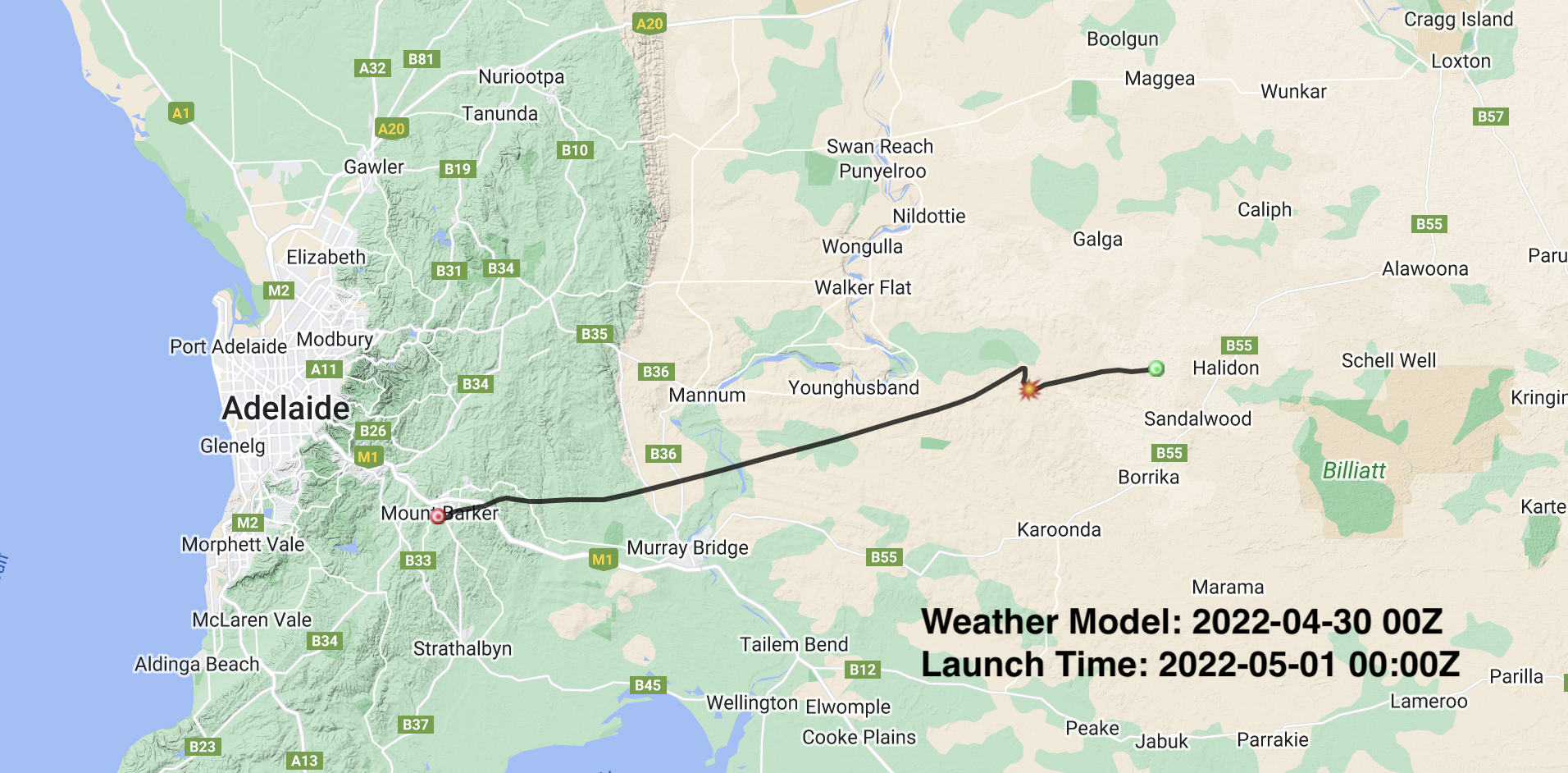
The current flight path predictions have the payload landing to the east of Purnong:
Primary Telemetry – 434.200 MHz
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
Note that you will need to use a ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
Tracking Details – Imagery – 443.500 MHz
This payload will not be flying on Sunday the 1st of May. We hope to fly this on our backup launch date of Sunday the 8th of May.
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a Linux computer, a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
Imagery received via the Wenet payload from a previous flight.
UPDATE: This balloon has now burst and landed 60k to the east of Bendigo. Thanks to everyone for tracking! The following callsigns were recorded as contributing telemetry:
Here’s some entertainment for the VK3s & Southern VK2s/VK1s this weekend – I’ve sent another pico balloon (30 grams) careening towards the east, currently doing >280 kph!
If it ends up floating as intended (and it might not, these things are finicky…) then it should keep heading past Melbourne and off towards the east coast.
Horus 55 was the culmination of something that had been discussed for many years within the Project Horus team – Live video from a high-altitude balloon. The technical challenges in doing this are many, from designing a transmitter system that provides enough signal without melting in the thin atmosphere at high altitudes, to building a high performance receive system that can capture that signal, and then upload it to the internet for everyone to enjoy. (After all, if it didn’t get live-streamed, did it really happen?)
At 10:30AM on the 7th of March 2021, all of this came to fruition with the first flight of the Project Horus DVB-S payload.
The Payloads: DVB-S Transmitter
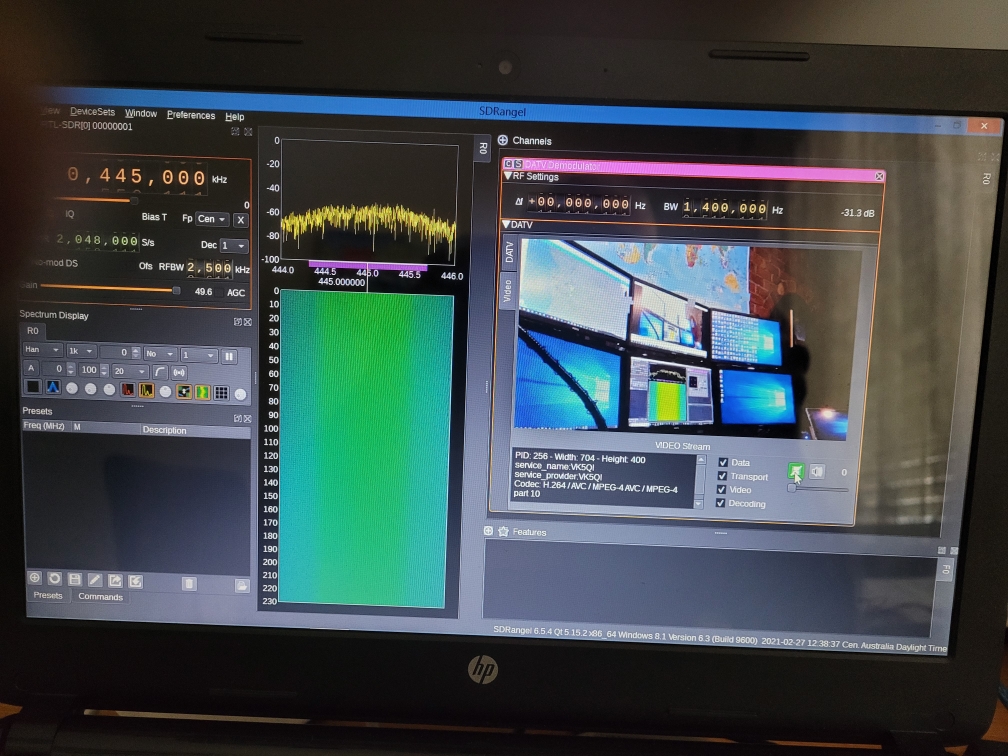
The DVB-S payload was the primary experiment on this flight, and had been in development by Mark VK5QI and Peter VK5KX over the last 12 months. The payload utilised a Raspberry Pi Zero W to capture and compress video (using F5OEO‘s DVB-S encoder and natsfr’s LimeSDR Gateware – this project would not have been possible without their work – thanks!), which was then modulated as a 70cm (445MHz) DVB-S transmission using a LimeSDR Mini. The signal was amplified to ~800mW using a LDMOS-based power amplifier. The overall power dissipation in the payload was ~6 watts, so a heat-spreading and heat-sinking system was built by Peter, including custom-milled interface plates for the LimeSDR.
The payload was powered from 8x Energizer Lithium AA primary cells, which are well-regarded for their low-temperature performance.
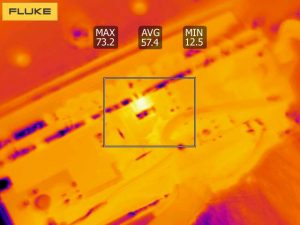
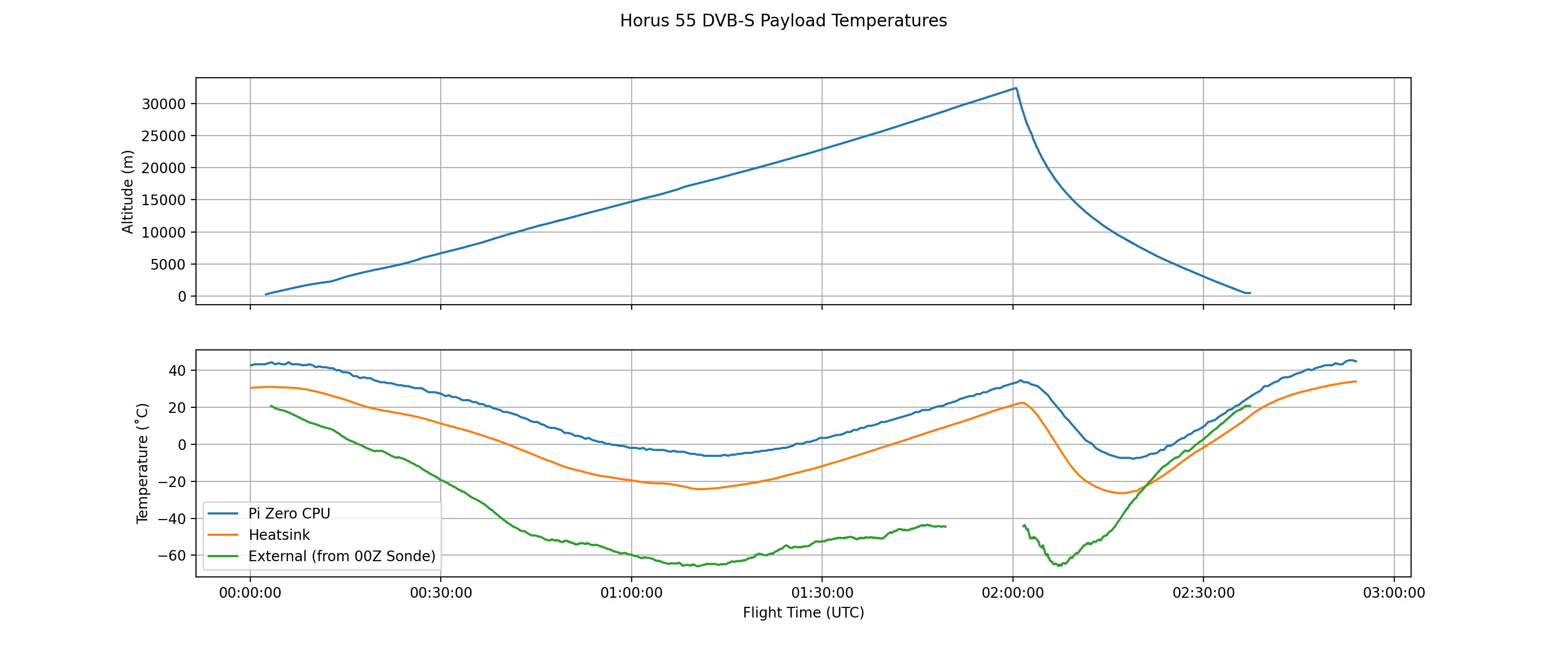
Much testing and tuning of the payload was performed in the lead-up to the launch, including monitoring of the temperatures within the payload when sitting in full-sun, to ensure it would not reach dangerous temperatures.
Mark VK5QI gave a presentation on the payload at the AREG February meeting, which is available here:
The final DVB-S parameters used on the flight were:
Frequency: 445.0 MHz
Mode: DVB-S
Modulation: QPSK, 1 Msps
Forward-Error-Correction: r=1/2
Video Resolution: 720 x 404
The Payloads: LoRaWAN Beacon
Also on this flight was an experimental LoRaWAN tracking payload built by Liam VK5LJG. The aim was to transmit position beacons into ‘The Things Network‘ (‘TTN’), which has gateways (receiver stations) in many locations across Australia.
The payload operated on the 915-928 MHz LIPD band, with a transmit power of ~50mW. The hardware was a RAK Wireless RAK5205 board, running custom firmware for the flight. Position updates were only sent every ~3 minutes to comply with TTN fair-usage guidelines.
We expected that this would be received by TTN gateways all around the Adelaide area… it actually performed much better than expected!
The Payloads: Tracking & Flight Management
The flight also included the usual complement of telemetry and flight management payloads. Primary telemetry was provided by a reprogrammed RS41, transmitting the ‘Horus Binary‘ 4FSK mode on 434.200 MHz. This was received by a large number of amateur stations running the ‘Horus-GUI’ demodulation software. Tracking of the payload was available on the HabHub tracker online, allowing global access to the position of the balloon throughout the flight.
The separate flight management payload was a LoRa-based payload operating in the 70cm (430.0MHz) amateur band. This payload allows remote termination of the flight if necessary (and it was actually used in anger this flight!).
Flight Preparation & Receiver Testing
On the weekend prior to the launch, two test-and-tune events were conducted, where receiving stations around the Adelaide area had the opportunity to configure and test the software and hardware necessary to receive the DVB-S signals. Transmissions were conducted from Steve VK5SFA’s QTH on Saturday, and from Black-Top Hill on Sunday. Both sites provided excellent line-of-sight to the Adelaide metropolitan are, enabling eight stations to be able to receive the test transmissions ready for the live balloon flight the following weekend.
Finally, a full systems check was conducted with Peter VK5KX. The test covered all of the equipment which would comprise the primary ground-station for the flight, receiving video from the payload and streaming it live to Youtube. This involved testing of the 2 x 18-element Yagi-Uda array, and all the receiver and streaming software. A big thanks to Hayden VK7HH for helping get the Youtube streaming working via his HamRadioDX channel.
Launch!
The ground station crew, chase teams, and spectators started to assemble at the Auburn Oval launch site around 9AM, to find that showers had set in.
It was decided to continue on with launch preparations and wait for the showers to pass.
By a bit after 10AM the showers had died away to a light sprinkling, and the balloon filling was started. Around this time the live-stream from the launch site was switched on, with many viewers from around the world tuning in to watch the proceedings.
The balloon used for this flight was a Totex 1000g, and an entire 3.5m^3 cylinder of helium (donated by the University of Adelaide) was used to fill it. Using the fast-fill rig the fill was completed in a few minutes (as opposed to the almost 1 hour of slow-filling that used to be required), and the balloon was tied off ready for launch.
After a final check that all payloads were working as expected, the (short) countdown began, and the balloon and payloads were released!
Ascent & Live Video!
After launch the ground-station system was switched into ‘auto tracking’ mode, and began pointing the high-gain Yagi antennas to follow the balloon and payloads. This ensured the best quality video reception, and it definitely worked!
Viewers at the launch site and all around the world via Youtube were treated to clear visuals relayed from the primary ground station as the balloon ascended up to cloud-base. Reports from other receiving stations around the region started trickling in, with Ian VK5ZD (near Kapunda) and Joe VK5EI (Adelaide) being the first to report in.
As the balloon reached the first cloud layer the views of the surrounding landscape was replaced with grey, and the chase teams took this as a sign that it was time to head off towards the expected landing area. Meanwhile the ground control team of Matt VK5ZM, Pete VK5KX and Grant VK5GR kept watch on the balloon state and the TV signal being relayed to YouTube and being broadcast around the globe.
The ground-station team continue to keep tracking the payload, uploading live video to over 200 viewers on Youtube. A big thanks to Hayden VK7HH for hosting the live stream on his Youtube channel, and helping answer the many questions that were asked by the viewers throughout the flight. Please make sure to Like and Subscribe his Youtube channel!
One of the last shots received before the balloon was cut away so the payloads could land
Chase, Cutdown & Recovery
This flight had four chase teams:
Mark VK5QI and Will VK5AHV
Darin VK5IX, along with Cameron and Dan
Liam VK5LJG
Gerard VK5ZQV
All the teams headed off in convoy towards Eudunda as their first stop, where the traditional bakery visit was made mid-flight instead of after recovery.
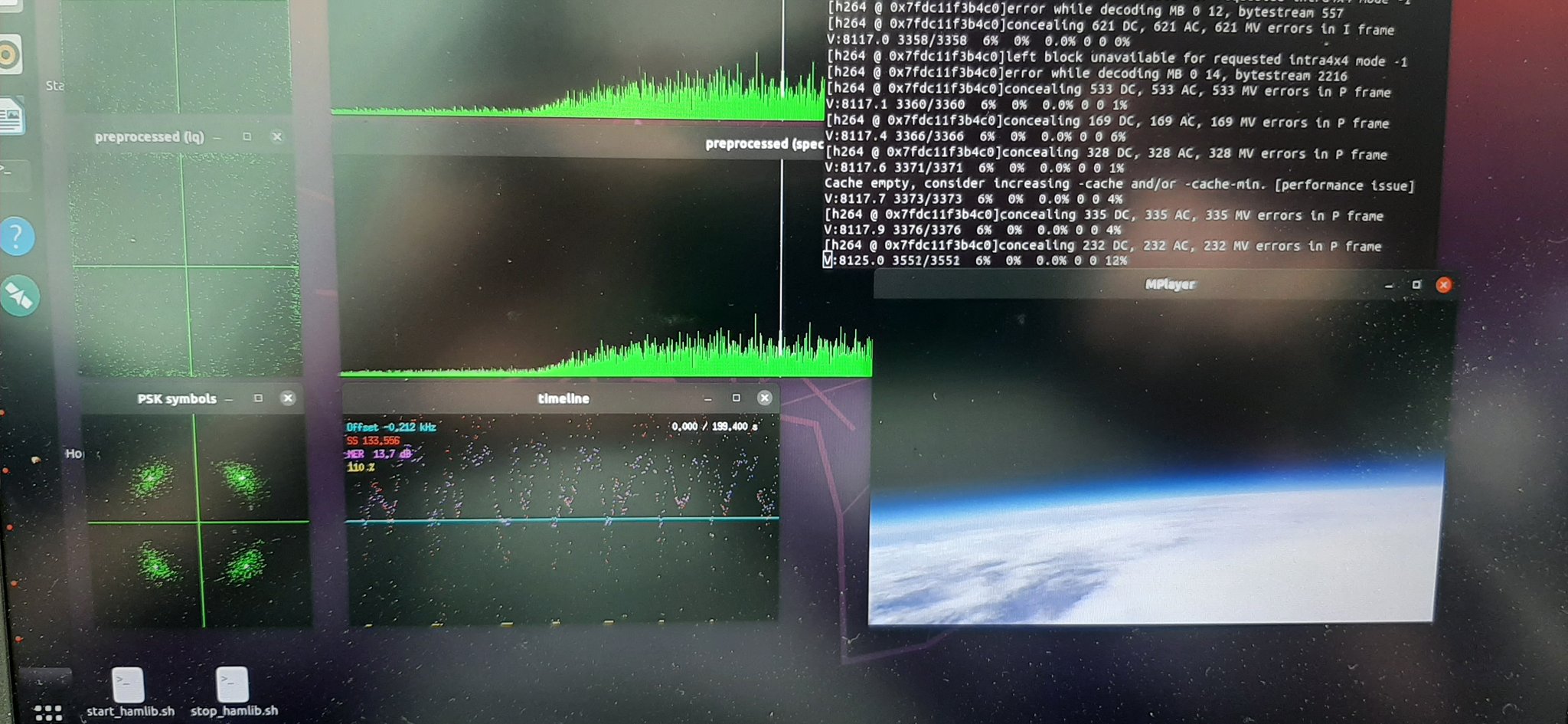
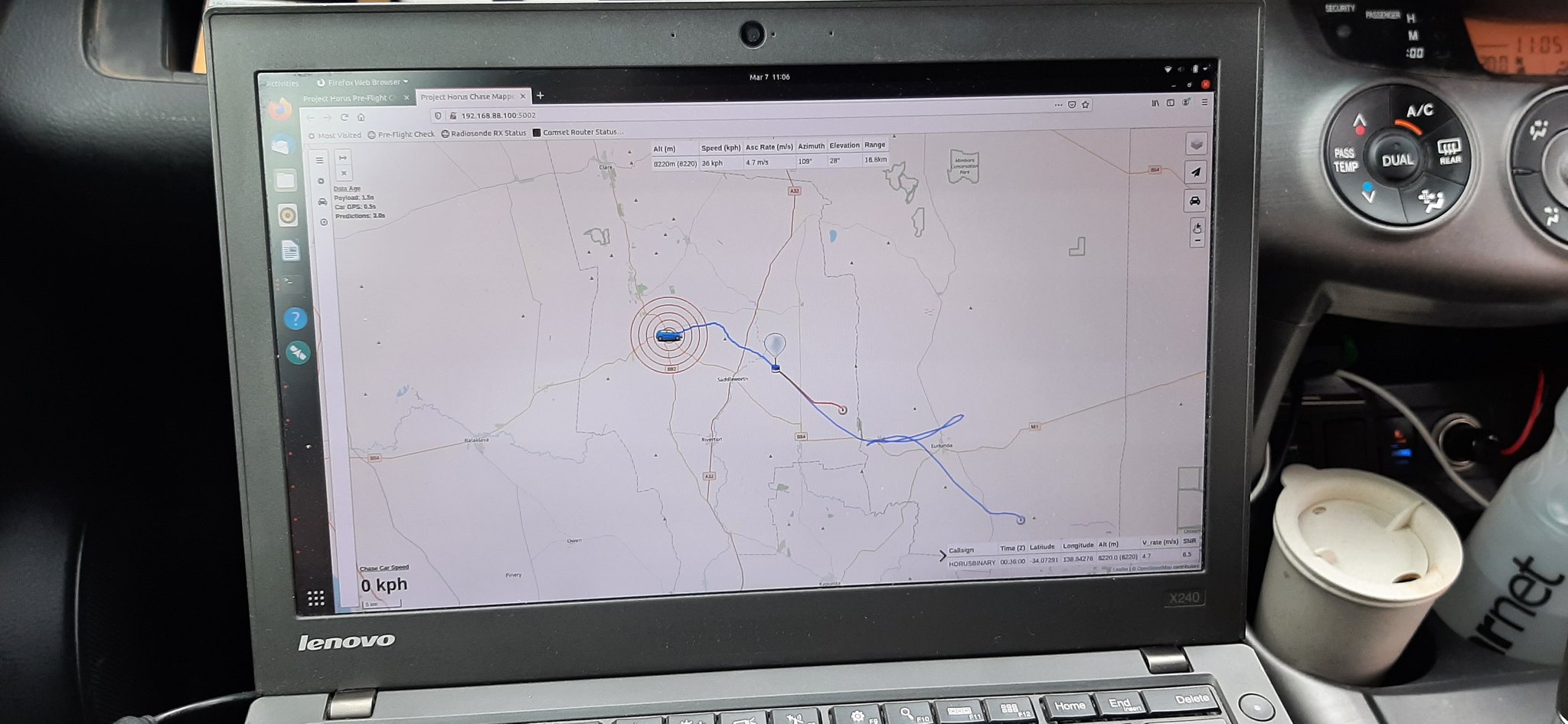
Mark and Will were receiving the video from the DVB-S payload in the car, which worked surprisingly well even with the fairly modest antenna setup on Mark’s car (an upward-fading turnstile).
After a quick lunch, the teams headed south towards the predicted landing area. As the flight processed and the balloon rose past the expected burst altitude of 30km, Mark made the call to terminate the flight to help land the payloads in an easily recoverable area. A few radio commands later, the payloads started falling, with the cut-down event observed via the video link (though the fast tumbling did result in a lot of broken video). The maximum altitude achieved was 32379m above sea level.
The teams headed towards the new predicted landing location, and after a bit of back-and-forth were able to be in position to watch the payloads land under parachute. Unfortunately the payloads were just a bit too far away for the teams to get imagery of the final descent.
After getting permission from the landowners (thanks!), the teams were able to enter the property and drive almost right up to where the payloads had landed.
While a bit bent and dented (and upside-down!), the DVB-S payload continued to transmit video after landing, with the receiver in Mark’s car capturing the team walking up and recovering the payload.
Analysis of log files from the payload showed that overheating was certainly not an issue – instead the heat-spreader plate within the payload reached a chilly -27˚C during the descent phase of the flight!
DVB-S Reception Reports
So far the following stations have reported being able to receive video from the DVB-S payload:
If you received video from this flight, let us know!
The longest distance the payload was received from was by the stations in Whyalla, at almost 190 km range, followed by Bill in Middleton, at 145km range. The payload designers are absolutely ecstatic at how many stations were able to receive video during this flight – hopefully we can repeat this success on more flights in the future!
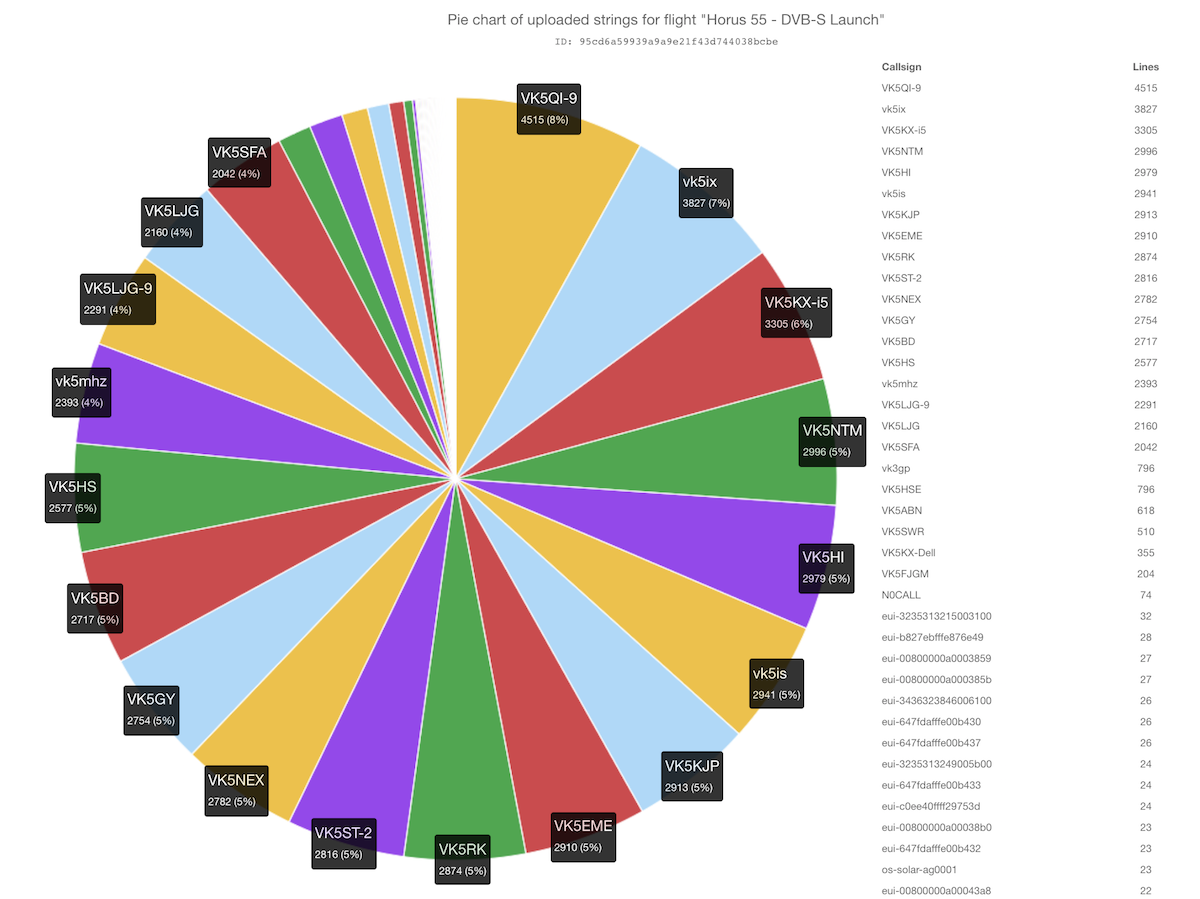
With every Project Horus flight we like to thank all the receivers that helped receive telemetry from the flight. All the telemetry you receive and upload to the net helps keep the tracking map up-to-date throughout the flight, and serves as a backup in the case of ground-station or chase-car receiver failure. On this flight telemetry was recorded from as far away as Horsham, though there were reports of telemetry reception in Melbourne – however it appears these stations did not upload their telemetry to the internet.
Callsign
Received Packets
Percentage of Flight Received
First-Received Altitude (m)
Last-Received Altitude (m)
VK5ABN
399
20.1%
8138
1585
VK5BD
1748
88.2%
1070
2142
VK5EME
1871
94.4%
679
1599
VK5FJGM
121
6.1%
11592
3349
VK5GY
1771
89.4%
927
2975
VK5HI
1919
96.8%
549
1278
VK5HS
1659
83.7%
4142
1702
VK5HSE
507
25.6%
28528
987
VK5KJP
1874
94.6%
699
658
VK5KX-i5
1878
94.8%
306
1013
VK5LJG (Home)
1381
69.7%
2946
3156
VK5LJG-9
965
48.7%
306
4916
VK5NEX
1798
90.7%
801
1637
VK5NTM
1930
97.4%
886
498
VK5QI-9
1799
90.8%
306
498
VK5RK
1853
93.5%
1214
825
VK5SFA
1311
66.1%
631
2131
VK5ST-2
1829
92.3%
556
670
VK5SWR
330
16.6%
11309
18461
VK3GP
509
25.7%
19672
13866
VK5IS
1893
95.5%
579
1026
VK5IX-9
1913
96.5%
306
498
VK5MHZ
1533
77.3%
4583
2741
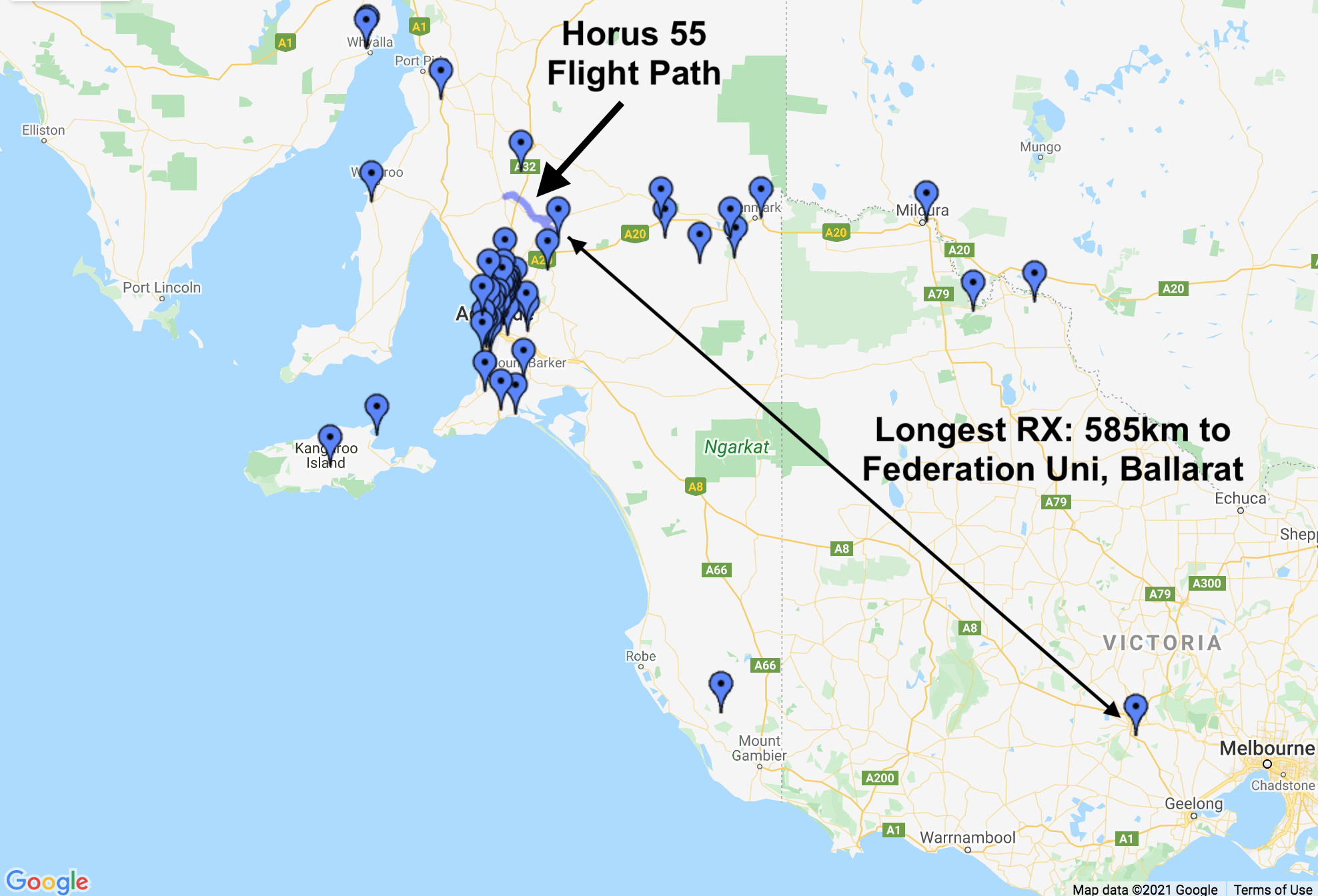
LoRaWAN Experiment Results
As mentioned earlier, the LoRaWAN payload was transmitting telemetry packets to be received by The Things Network gateways. We expected the payload to be received by stations in the general Adelaide area, however it turned out that at the peak of the flight we were received by gateways as far away as Ballarat, Victoria! Full details on what gateways received each packet are available here.
The longest path was 585km, which for a ~50mW transmitter at 923 MHz is quite an achievement! The world record distance for this system is 823km, and we’re interested to see if we can beat this on a future launch!
Flight Track
At the conclusion of the flight we were also able the telemetry into this flight profile, which gives an appreciation of the journey the balloon and the experimental TV transmitter under took.
Conclusion & Future Flights
Horus 55 - Flight Statistics
Metric
Result
Flight Designation:
Horus 55
Launch Date:
2021-03-07 00:02Z
Landing Date:
2021-03-07 02:37Z
Flight Duration:
~2.5 hours
Launch Site:
-34.02932,138.69124
Landing Site:
-34.25959,139.11443
Distance Traveled:
46 km
Maximum Altitude:
32,379 m
With the huge success of this flight, the team plans to follow this up with more video flights in the future. There are many lessons to be learnt from this flight, and many improvements that can be made to both the payload, the ground-station, and the live-streaming systems. Viewers can look forward to higher quality video, more running commentary, and hopefully live video from the chase-cars as they recover the payloads.
The next few months will be getting busy for the Amateur Radio Experimenters Group, with the upcoming Riverland Paddling Marathon taking up a lot of club members time. Expect the next full-scale flight sometime in late June – weather permitting!
It is late and we are still processing telemetry and video streams but we thought we would post a quick note to say that Horus 55 was an absolute success. Stories are coming in from across the region from people who successfully watched the Amateur TV signal live over 80-90km away.
Reports also of the primary 434MHz 4FSK telemetry beacon being received 700km away in Melbourne plus the LoraWAN Things Network gateways over 560km away reporting packets from the experimental LoraWAN payload on 923MHz ISM.
We will post a long form story in the next day, but here is one of the amazing frame grabs from the TV transmitter just after burst. As the TV payload started to tumble it sent back this frame showing all of the telemetry transmitters and the parachute in one shot!
Finally here was the moment the chase and recovery crew picked up the payload.
The DVB-S high-altitude balloon launch (hopefully the first of many!) has now been locked in for 10AM ACDT Sunday the 7th of March (2330z Saturday 6th), from the Auburn Oval. The launch team is expected to arrive on site starting 9AM, and spectators are welcome!
For those without D-ATV receiving equipment, AREG is going to attempt to stream the received ATV pictures via Hayden VK7HH’s HamRadioDX YouTube channel at the same time. You will find the link to the YouTube broadcast here:
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
Note that you will need to use a ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
Tracking Details – DVB-S Video – 445 MHz
If you want to get involved through receiving the D-ATV signal direct from the balloon on 445 MHz take a look at the How-To Guide being maintained by Mark VK5QI, available here: docs.google.com/D-ATV_Setup_Guide


 The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!

















")
")


")
")
")
")
")
")







 It is late and we are still processing telemetry and video streams but we thought we would post a quick note to say that Horus 55 was an absolute success. Stories are coming in from across the region from people who successfully watched the Amateur TV signal live over 80-90km away.
It is late and we are still processing telemetry and video streams but we thought we would post a quick note to say that Horus 55 was an absolute success. Stories are coming in from across the region from people who successfully watched the Amateur TV signal live over 80-90km away.
