Horus 60 was launched on the 20th of August 2023 as part of AREG’s 25th Anniversary celebrations, and featured our popular SSTV imagery payload along with a new high-quality Wenet imagery payload and other experimental payloads.
On this launch we had Geordie VK3CLR along for the chase, who put together a great video of the day’s activities, and tells the tale better than I could write it up here!
Thanks again to Geordie for producing this!
A dashboard showing telemetry from the flight is available here, and the main statistics from the flight are shown in the following table:
Horus 60 Flight Statistics
| Launch Date: | 2023-08-20T00:22:27.000000Z |
| Landing Date: | 2023-08-20T02:35:26.000000Z |
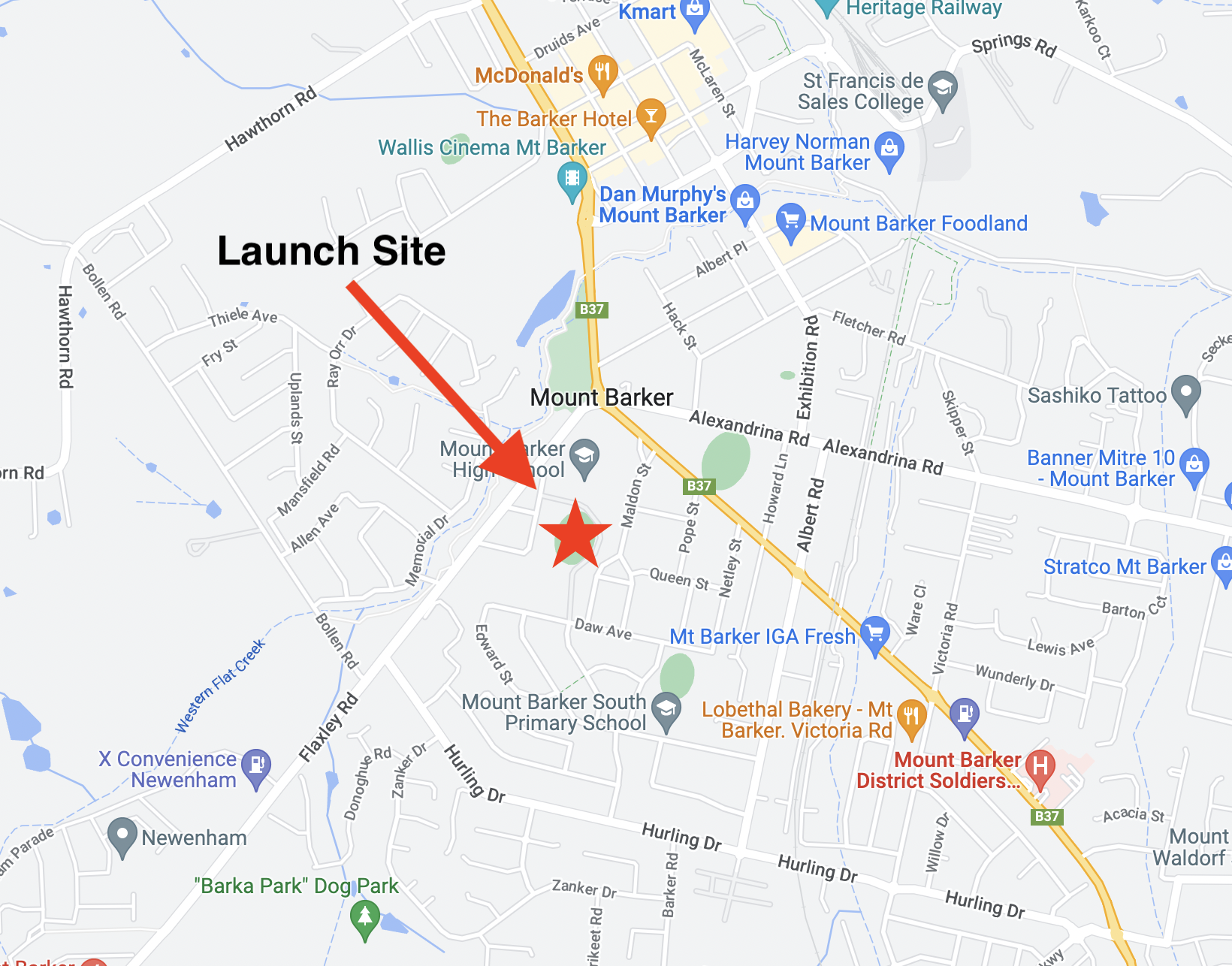
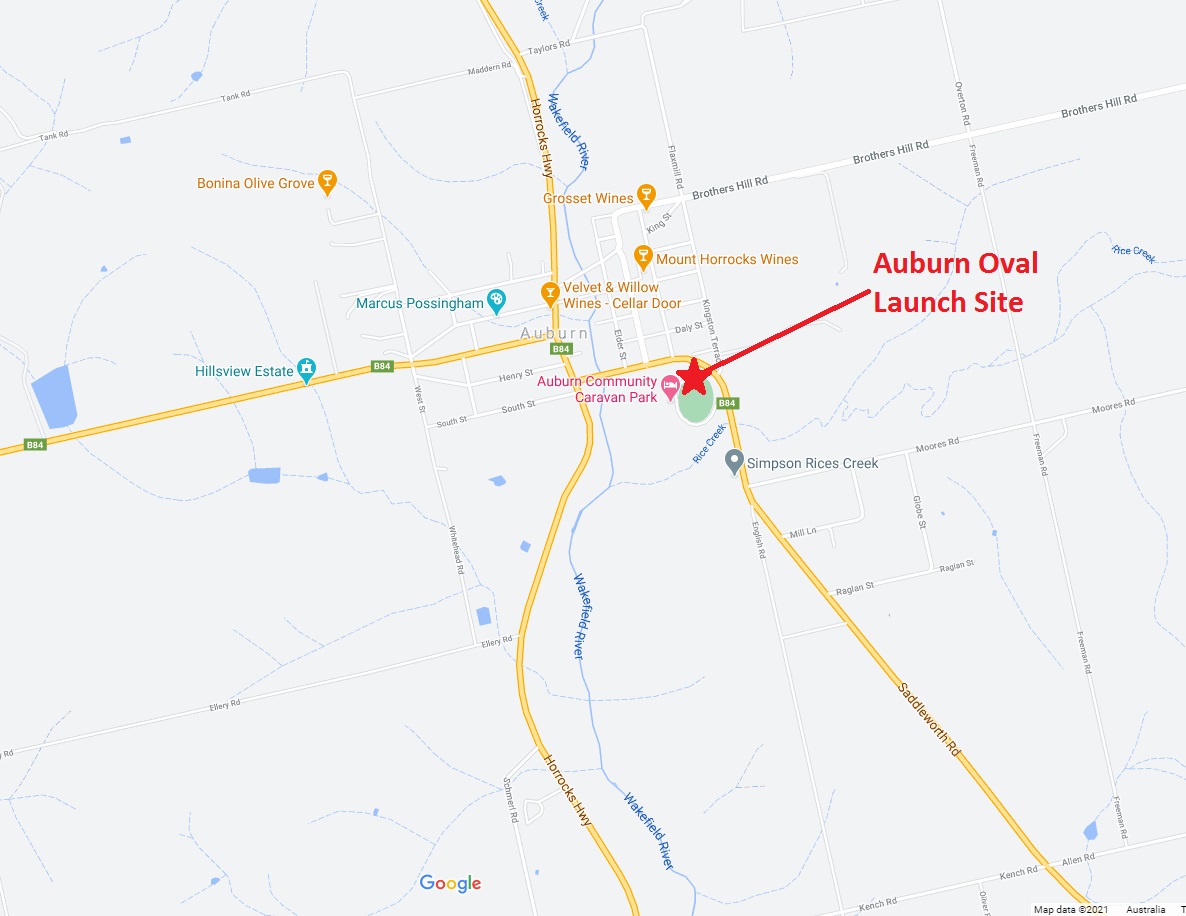
| Launch Site: | -35.07586, 138.85677 |
| Landing Site: | -35.34007, 139.67903 |
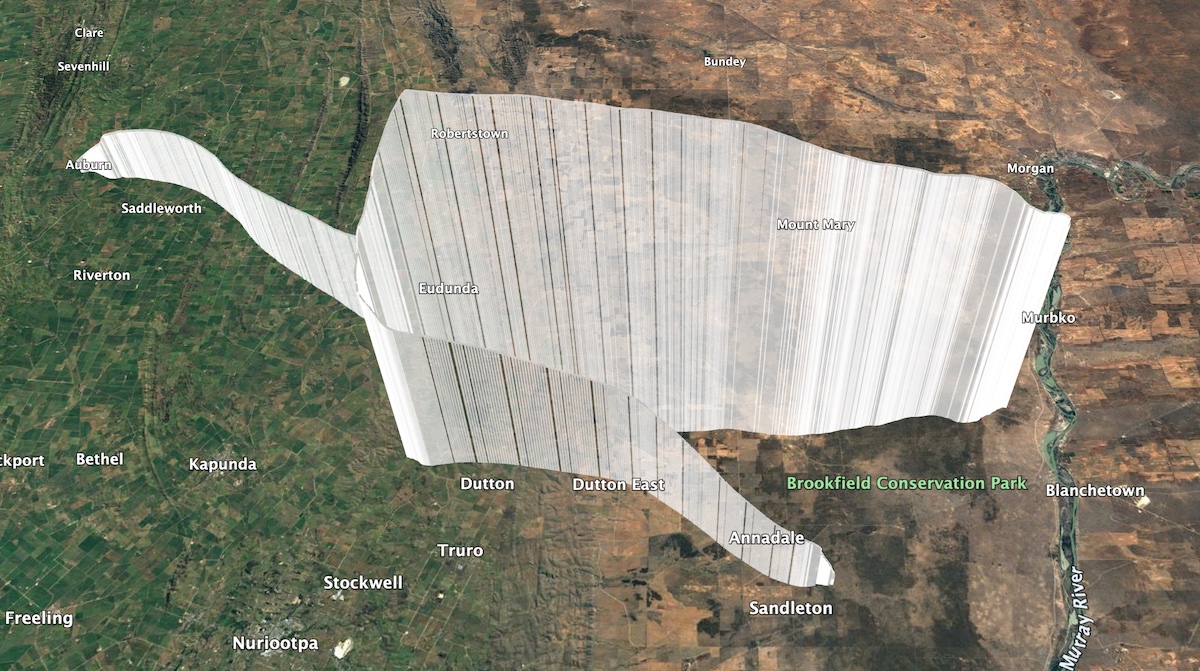
| Distance Travelled: | 80 km |
| Maximum Altitude: | 35407 m |

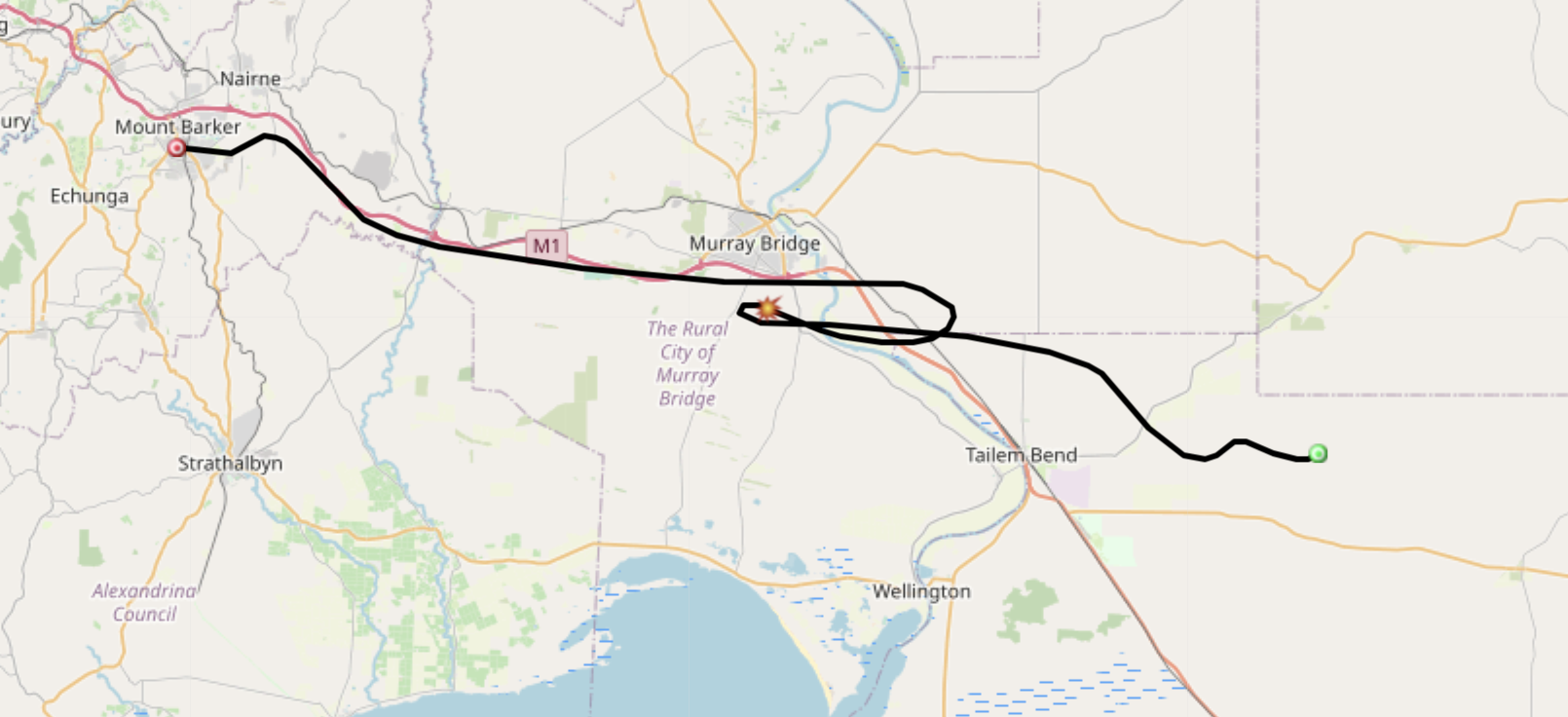
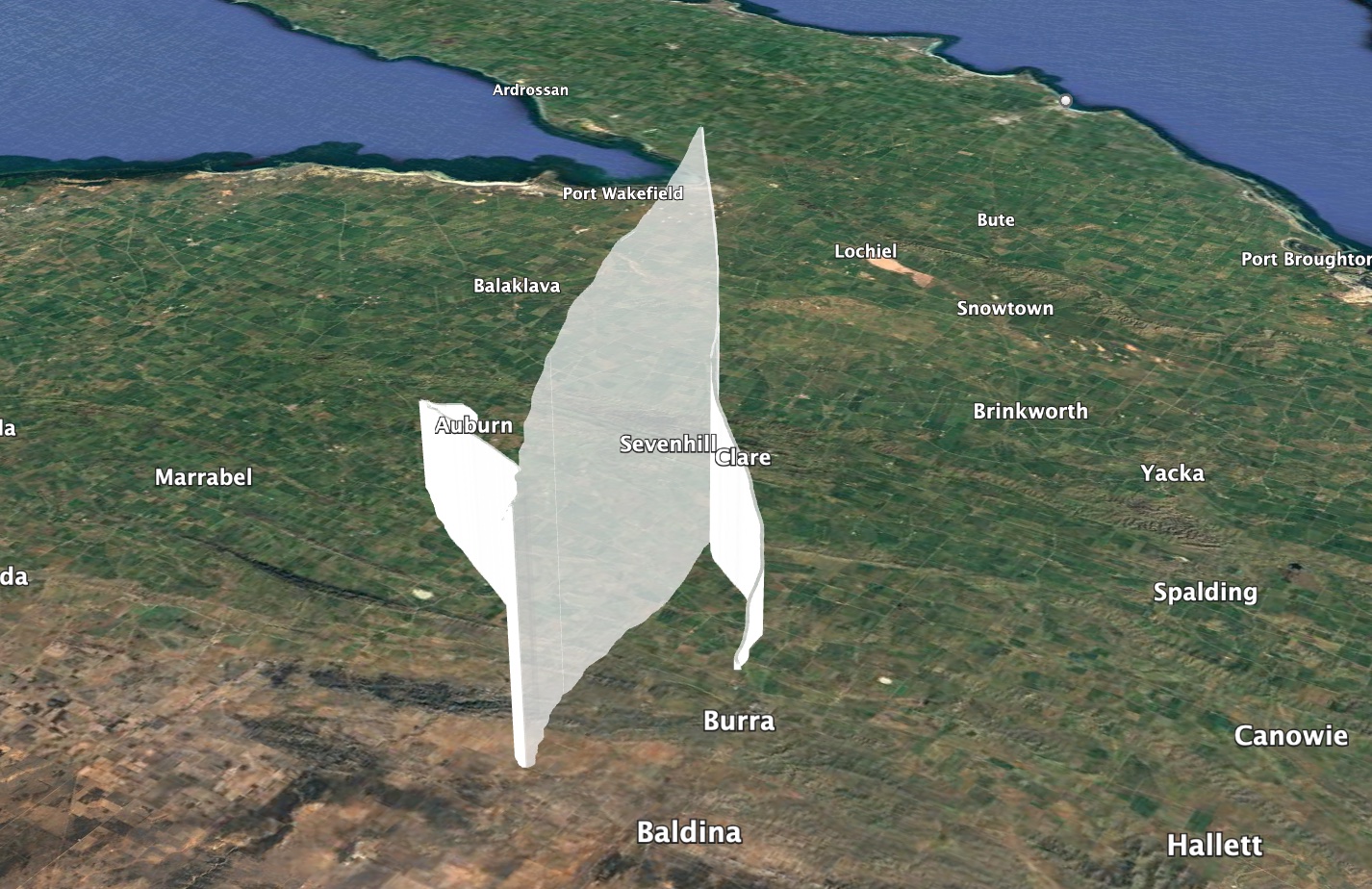
Horus 60 Flight Path
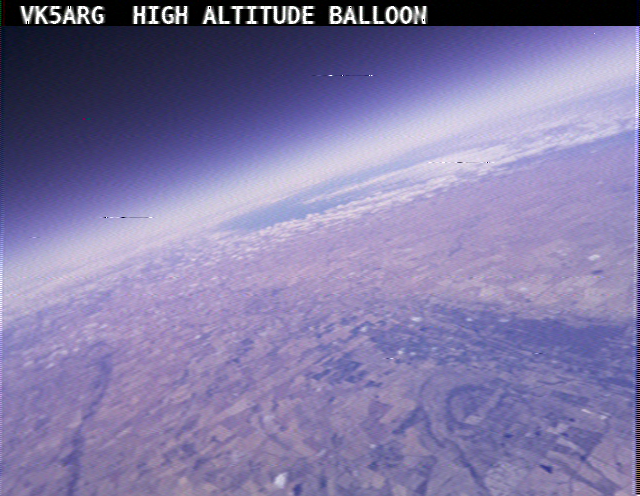
SSTV Payload Results
The SSTV payload produced excellent imagery throughout the flight, though unfortunately we had a GPS fault again (likely due to interference from an adjacent payload), so no position/altitude overlays were shown on the images.





Images were received from many people around the Central SA area, with submissions for the SSTV reception certificate from: VK5KVA, VK5KX, VK5ST, VK5ZBI, VK5AV, VK5MA, VK5CLD, VK3FUR/5 and VK5ZM. If you received imagery from the flight, please email us at vi25areg@areg.org.au to get your certificate!

Horus 60 SSTV Reception Certificate Sample
Wenet HQ Imagery Payload
Horus 60 also had the first flight of a new Wenet imagery payload, this time utilising a PiCamera HQ and a large lens, promising much higher quality imagery than we’ve captured previously.
While previous attempts at using higher quality optics have had issues with defocusing in cold temperatures, on this flight the camera performed perfectly, with some of the best quality imagery we’ve seen from a Horus launch in a very long time!


















As per tradition, just before packing up the Wenet payload, the chase team took a group photo near the landing site:

The chase team: Mark VK5QI, Drew VK5CLD, Will VK5AHV, Michaela VK3FUR and Geordie VK3CLR
Thanks to all that helped receive the Wenet imagery:
VK3TNUpi4-1: 94460 packets (23.06 MB)
VK5CLD-9: 106422 packets (25.98 MB)
VK5KX-9: 165174 packets (40.33 MB)
VK5IS: 102056 packets (24.92 MB)
VK5QI-9: 113723 packets (27.76 MB)
The more receivers we have during a flight, the higher chance we have of obtaining clear imagery for live display on ssdv.habhub.org!
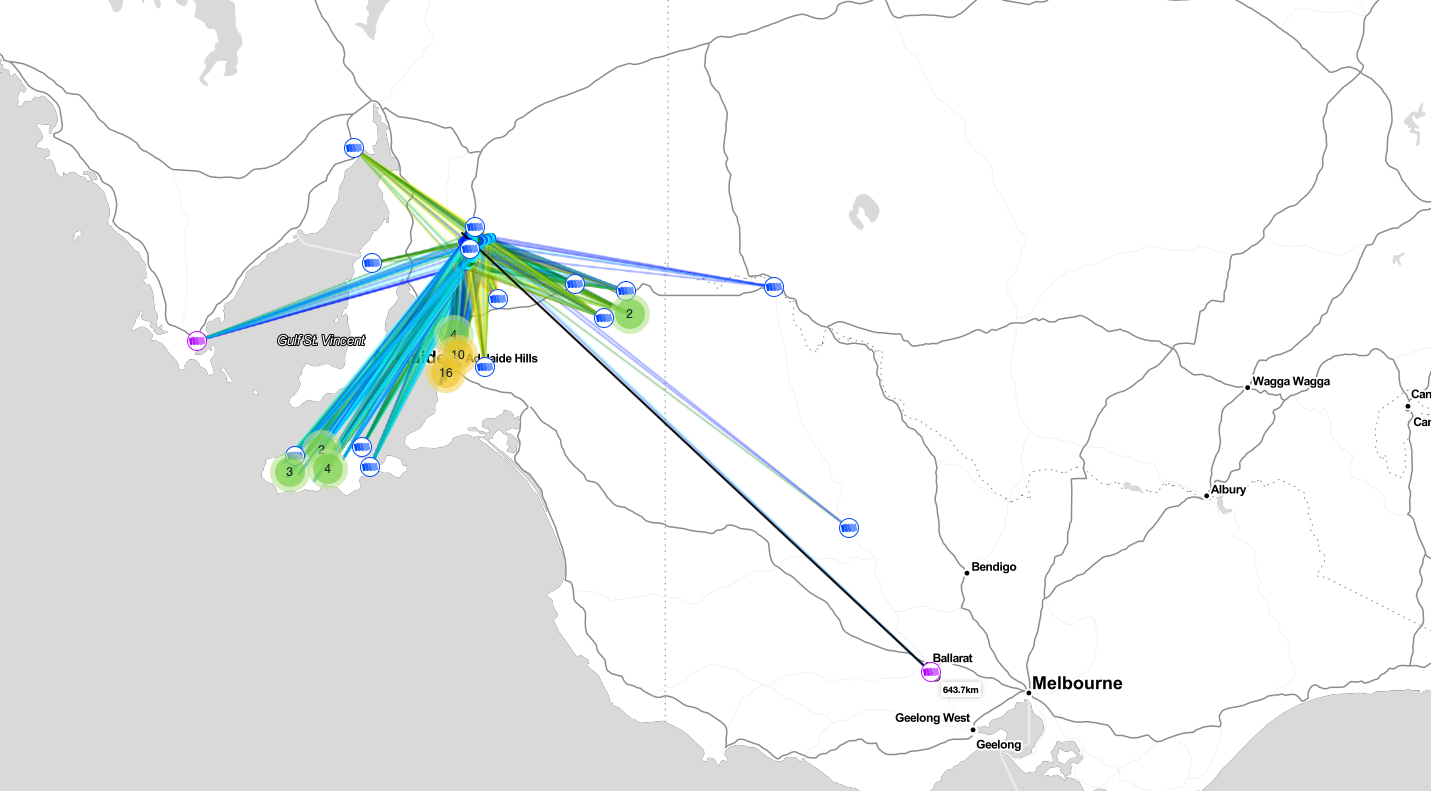
Primary Telemetry Reception – VI25AREG
For this flight, the primary telemetry payload used the VI25AREG callsign, and performed flawlessly (as we always hope it will!). We had many receivers on this flight, with statistics on who received how many packets in the following table:
| Callsign | Received Packets | Percentage of Flight Received | First-Received Altitude (m) | Last-Received Altitude (m) |
|---|---|---|---|---|
| BARC-RRR | 1777 | 95.8% | 664 | 255 |
| VK3APJ | 270 | 14.6% | 11495 | 6738 |
| VK3BKQ | 362 | 19.5% | 26022 | 27416 |
| VK3IRV | 61 | 3.3% | 31868 | 34503 |
| VK3TNU | 714 | 38.5% | 8354 | 9180 |
| VK5ALG | 1446 | 78.0% | 864 | 6738 |
| VK5AMH | 1693 | 91.3% | 1731 | 964 |
| VK5APR | 1590 | 85.8% | 1240 | 6700 |
| VK5ARG | 1760 | 94.9% | 477 | 911 |
| VK5BD | 1371 | 73.9% | 5518 | 6738 |
| VK5CLD | 235 | 12.7% | 2399 | 34005 |
| VK5CLD-9 | 1516 | 81.8% | 342 | 22 |
| VK5DJ | 662 | 35.7% | 9784 | 24529 |
| VK5DSP-hab | 624 | 33.7% | 25743 | 6700 |
| VK5IS | 1682 | 90.7% | 723 | 3247 |
| VK5KX | 1580 | 85.2% | 1240 | 22 |
| VK5KX-9 | 1437 | 77.5% | 8955 | 70 |
| VK5LN | 1102 | 59.4% | 11683 | 7329 |
| VK5NEX | 1529 | 82.5% | 964 | 6738 |
| VK5QI-9 | 1348 | 72.7% | 339 | 16031 |
| VK5RK | 1078 | 58.1% | 1661 | 29780 |
| VK5RR-VK5FO | 435 | 23.5% | 14763 | 6700 |
| VK5ST-4 | 1466 | 79.1% | 3146 | 6816 |
| VK5TRM | 1597 | 86.1% | 1587 | 1018 |
| VK5ZBI | 1585 | 85.5% | 1220 | 6777 |
| VK5ZQV | 797 | 43.0% | 15601 | 6777 |
| vk5mhz | 546 | 29.4% | 3761 | 24970 |
Thanks to all that received!
Radiation Sensor Payload – HORUSRADMON
This payload was added on somewhat last-minute, and included a photo-diode-based radiation sensor, with the aim of investigating gamma ray levels throughout the flight, similar to what has been performed on previous flights.

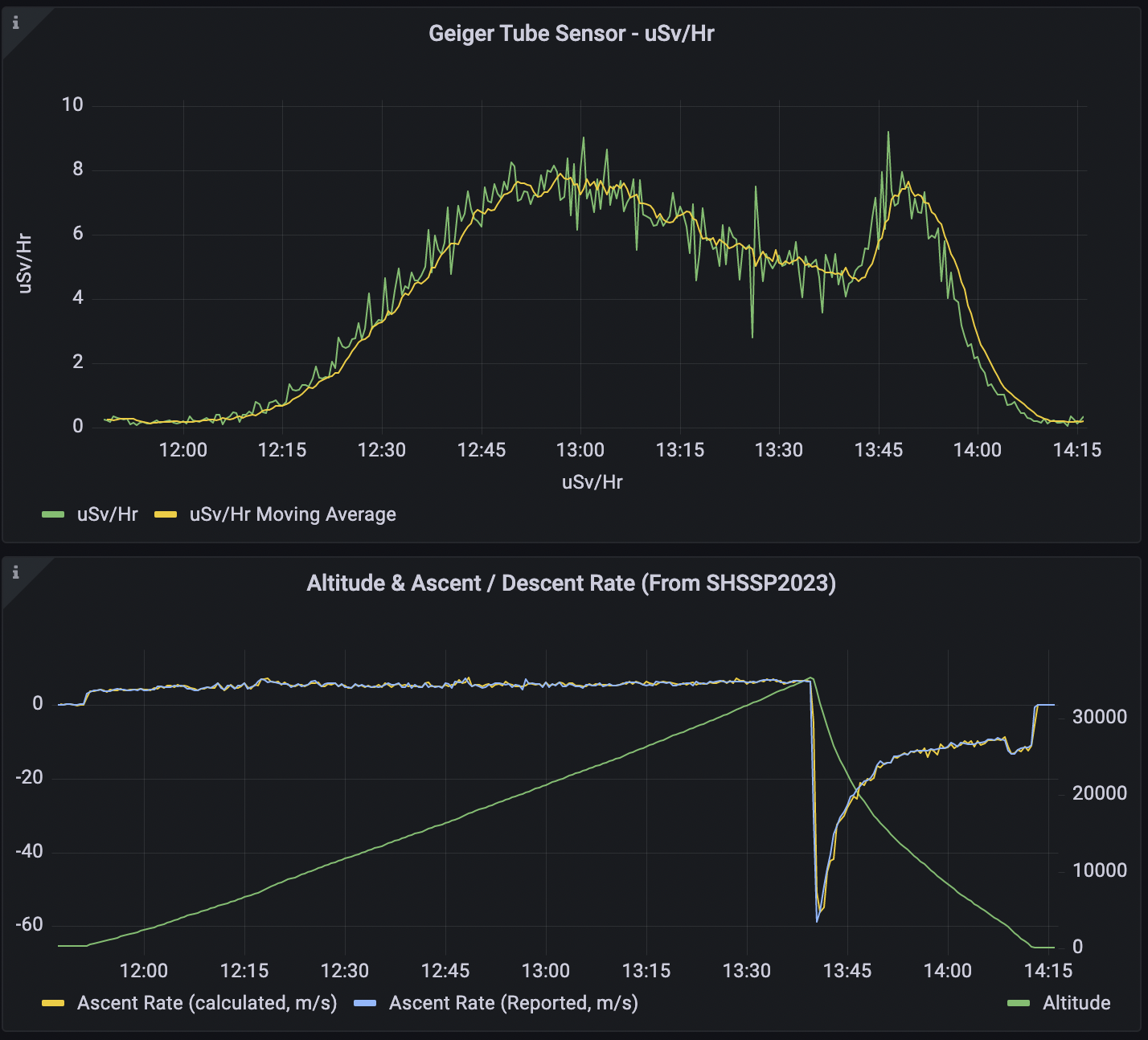
Horus 60 Radiation Sensor Results
As expected, the radiation count increased throughout the ascent, before falling again above 20km altitude due the Regener-Pfotzer Maximum effect. Some noise was observed on the sensor just after burst, likely due to the turbulence from the initial fast descent.
Thanks to everyone that received telemetry from this payload, even with the short notice of it’s inclusion in the flight!
| Callsign | Received Packets | Percentage of Flight Received | First-Received Altitude (m) | Last-Received Altitude (m) |
|---|---|---|---|---|
| BARC-RRR | 899 | 91.7% | 609 | 189 |
| VK3BKQ | 4 | 0.4% | 34806 | 35038 |
| VK5ALG | 663 | 67.7% | 1092 | 6727 |
| VK5ALG-9 | 428 | 43.7% | 8449 | 76 |
| VK5APR | 791 | 80.7% | 1218 | 6804 |
| VK5ARG | 862 | 88.0% | 507 | 1209 |
| VK5CLD-9 | 707 | 72.1% | 347 | 16 |
| VK5DJ | 320 | 32.7% | 27784 | 6727 |
| VK5DSP-hab | 314 | 32.0% | 26216 | 6727 |
| VK5KX-9 | 715 | 73.0% | 9012 | 76 |
| VK5QI-9 | 676 | 69.0% | 346 | 16113 |
| VK5RK | 284 | 29.0% | 30131 | 6644 |
| VK5ST-4 | 788 | 80.4% | 2846 | 2375 |
| VK5TRM | 765 | 78.1% | 1762 | 1264 |
| vk5mhz | 19 | 1.9% | 2804 | 3471 |
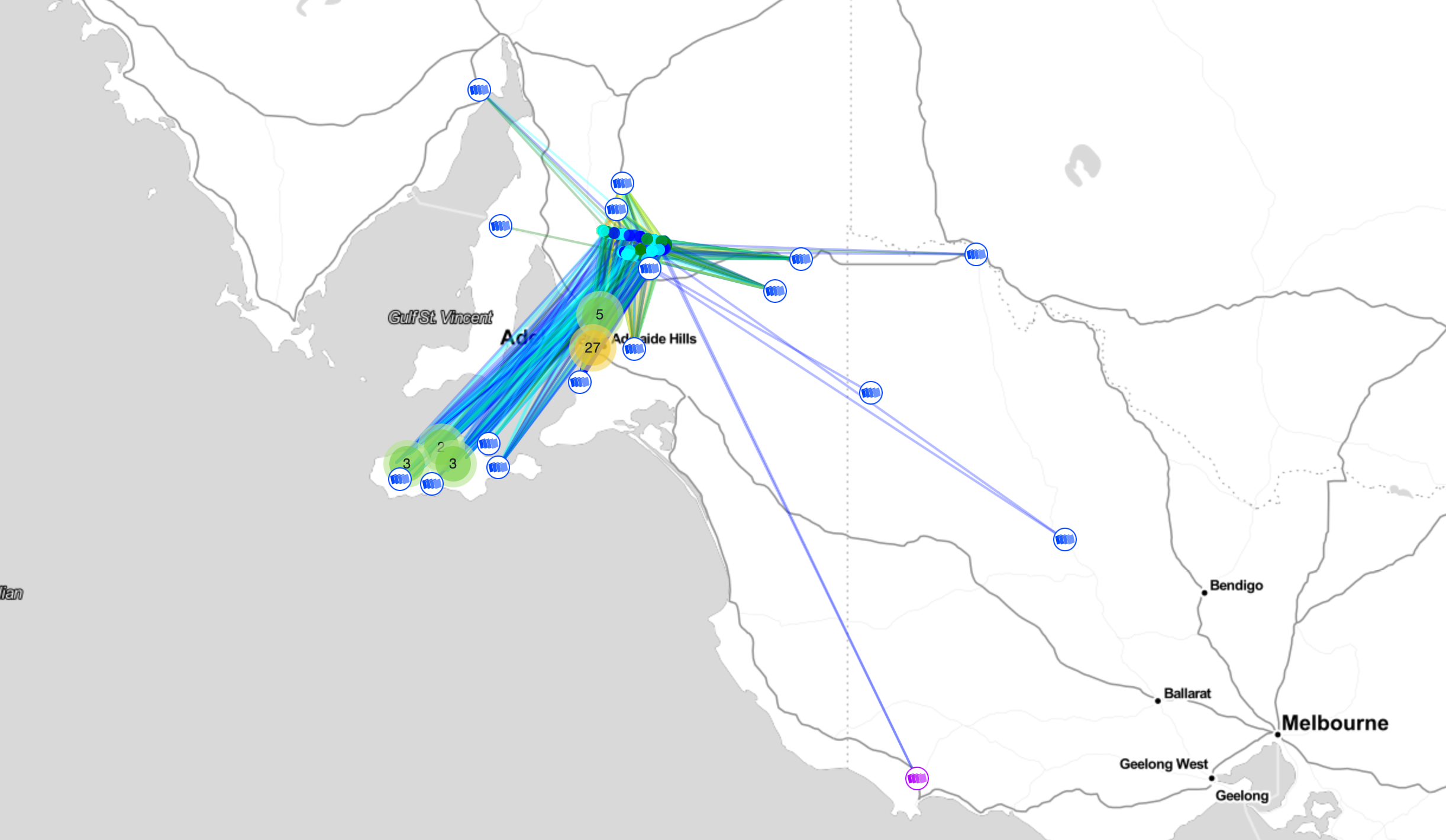
Helium Tracker Payload
This flight also saw a new LoRaWAN payload from Liam VK5ALG, which was received via the Helium Network using the 923 MHz ISM band. On this flight the furthest reception report was from a station in Peterborough, at approximately 250km range. Future flights of this will use a higher gain antenna, and we hope to see even higher reception ranges.
We hope to have positions from this payload showing up on the SondeHub-Amateur tracker on future launches!
Conclusion
A big thanks to everyone that participated in this launch, from those that came along to the launch site, chased, or received telemetry and imagery from home!
We hope to perform a few more flights later this year, including the return of a cross-band repeater payload!