Through 2025 AREG and Project Horus have been participating in the LaunchBox program, a reimagining of a STEM program that AREG was a part of back in the 2010s, where we flew student-built payloads on high altitude balloon launches. Fleet Space has re-started the program and expanded it Australia-wide, with hundreds of year 7-8 students participating in the 2025 program!
As part of the program Project Horus has now performed 2x high altitude balloon launches, one as part of the ‘Summit to the Stratosphere’ event on November the 2nd, and another on the 14th of December.
Horus 67 – 2nd November 2025 – “Summit to the Stratosphere” Event
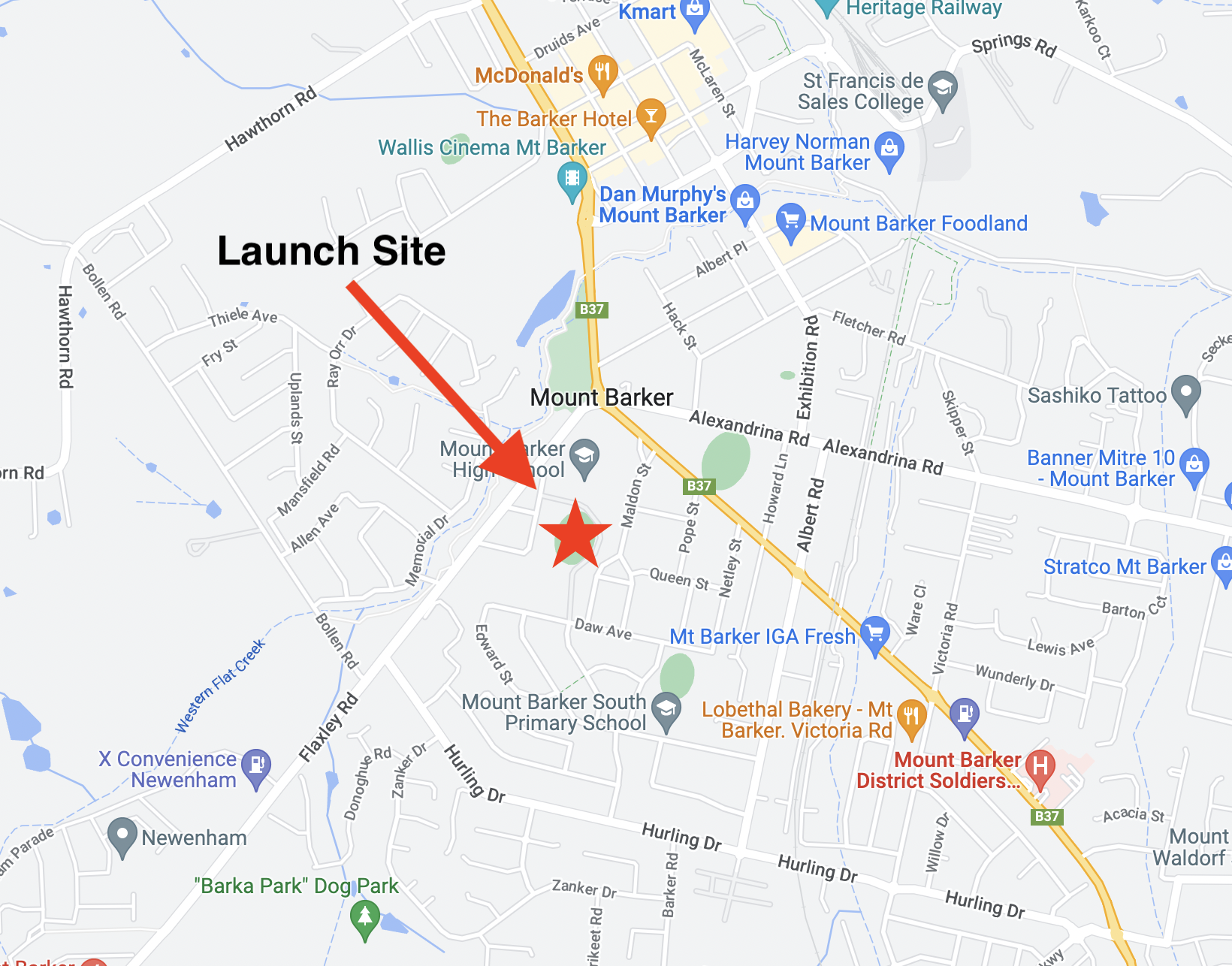
As the planned culmination of the 2025 LaunchBox program, Fleet Space held an all-day STEM event at the Mt Barker Summit Sport & Recreation Park. This was mainly targeted at the students participating in the program, but was also open to the public. During the program the student teams were competing for one of two payload slots on a high-altitude balloon launch to be performed on the day. There were a range of displays, including the CSIRO ‘Mission Control’ truck (who let us show the SondeHub Tracker and imagery on their huge video wall), robotics displays, and a lot more! Over 700 people (students and public) attended the event over the course of the day.






AREG ran a ground station and display stand at the event, which was a great opportunity to promote amateur radio to the public. Thanks to everyone that helped out on the stand throughout the day, and in particular Peter VK5KX for bringing all of his receiver equipment!






The weather was pretty bleak all morning, with high winds and showers causing the launch team to have to quickly bring the payloads undercover a few times during launch preparations. Gusty winds around the launch site’s grandstand were monitored using ‘sounding’ party balloons, which showed strong wind shear not far above the ground – the balloons flew sideways! This resulted in the decision to not launch the student payloads, instead launching the tracking and camera payloads, along with a lightweight Robinson Aerospace RASCube-LB PCB stack, essentially the same payloads that were flown on Horus 66. The camera payload had the LaunchBox mascot, ‘Scout’, sitting in front of the camera – unfortunately Scout wasn’t secured that well and broke off at launch.
Many hands made easy work of the balloon fill, even as it started to rain again, and a lull in the wind was taken advantage of to get everything in the air. Unfortunately we were all a bit busy at the time and don’t have any video footage or imagery of the launch! The payloads quickly ascended into a thick cloud layer, and the chase teams headed off to the south-east to get in place for recovery.














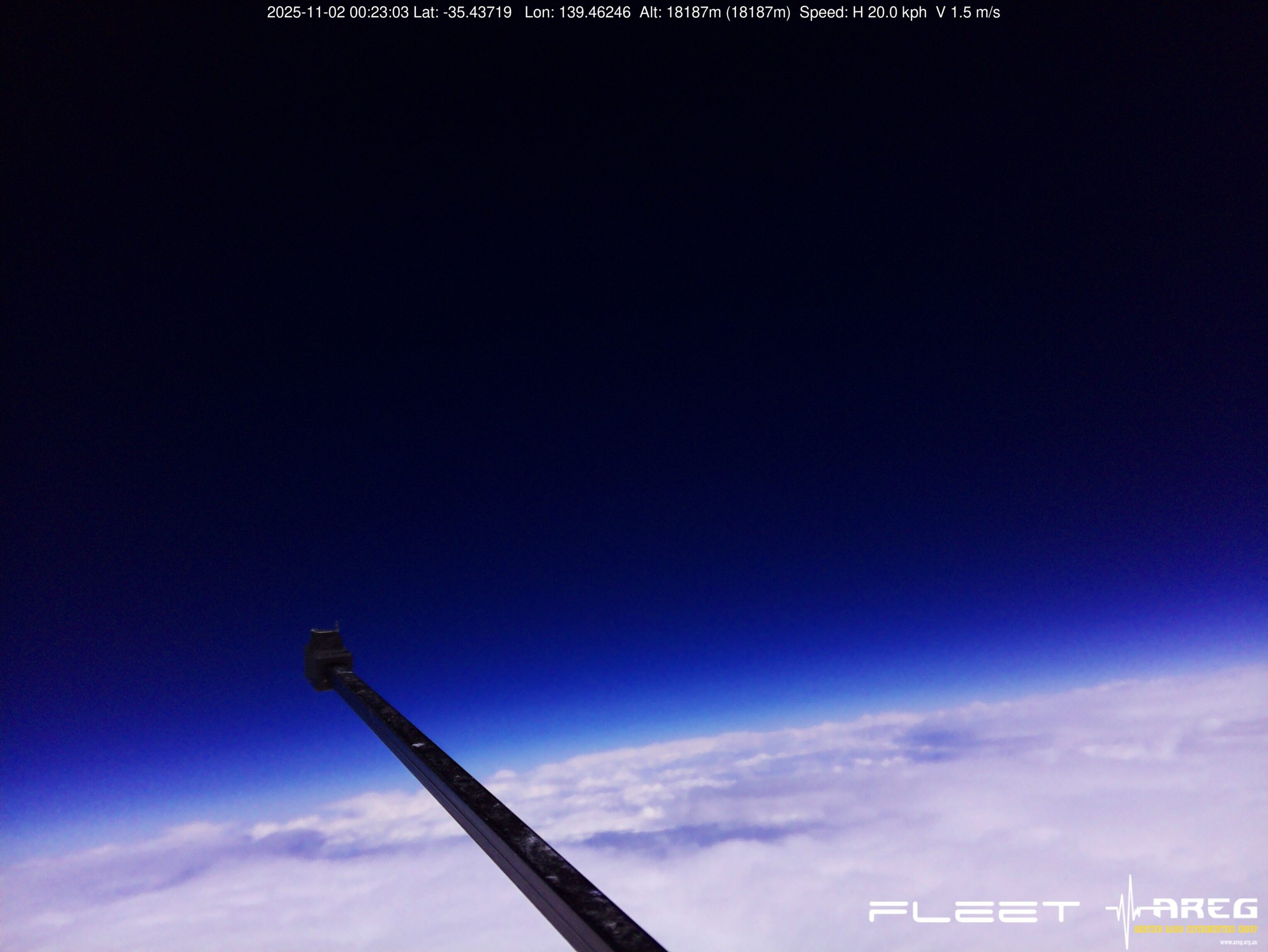
Imagery was receiver right through the flight thanks to multiple ground stations being deployed. The ground-station at the launch site was unfortunately affected by RF interference from the CSIRO video wall – thankfully Autumn VK5CLD’s receiver was able to get most of the missing packets! The thick cloud layer did make for a lot of grey images on ascent, leading us to wonder if the camera was still functional, but eventually the flight made its way out the top and gave us the nice black-sky images we were hoping for.
At just over 18.2km altitude the balloon burst, much lower than we had expected. The payloads tangled up after burst, resulting in a higher than expected descent rate, and even some damage to one of the payloads boxes.
 Michaela VK3FUR and Geordie VK3CLR were able to recover the payloads shortly after landing, discovering that almost 2/3 of the balloon was tangled up with the parachute, explaining the high descent rates.
Michaela VK3FUR and Geordie VK3CLR were able to recover the payloads shortly after landing, discovering that almost 2/3 of the balloon was tangled up with the parachute, explaining the high descent rates.
Horus 67 (LaunchBox) Flight Statistics
| Launch Date: | 2025-11-01T23:32:21Z |
| Landing Date: | 2025-11-02T00:50:57Z |
| Launch Site: | -35.07782, 138.89282 |
| Landing Site: | -35.61543, 139.75464 |
| Distance Travelled: | 98 km |
| Maximum Altitude: | 18202 m |

Horus 67 Flight Path
Preparing for and performing this launch was a huge effort, made much easier by the many volunteers that helped out on the day. In particular I’d like to call out Michaela VK3FUR, Geordie VK3CLR, and Harper VK1TTY, who travelled all the way from Victoria to help out with the event!
Telemetry Reception Stats
The primary tracking payload (HORUS-V2) was received by the following callsigns:
BARC-RRR,VK1TTY,VK4XSS,VK5AI,VK5AKK,VK5ALG,VK5ALG-9,VK5ARG,VK5CV,VK5DEN,VK5DJ,VK5GA,VK5GY,VK5HS,VK5HW,VK5IS,VK5KX-9,VK5KX-i5,VK5LA,VK5LN,VK5MAS,VK5NEX,VK5OCD,VK5PE,VK5PJ,VK5QI-9,VK5ST-4,VK5TUX,VK5ZAR,VK5RK,VK3ZAZ,VK5TRM,VK5ZMD
A dashboard showing reception statistics is available here.
The Wenet imagery payload was receiver by the following stations:
- VK4XSS: 3772 packets (0.92 MB)
- VK5QI-Mac (using VK5KX’s antennas): 32514 packets (7.94 MB)
- VK5KX-9: 62465 packets (15.25 MB)
- VK5CLD-9: 63899 packets (15.60 MB)
- VK5ALG-9: 64 packets (0.02 MB)
A dashboard showing Wenet reception statistics is available here.
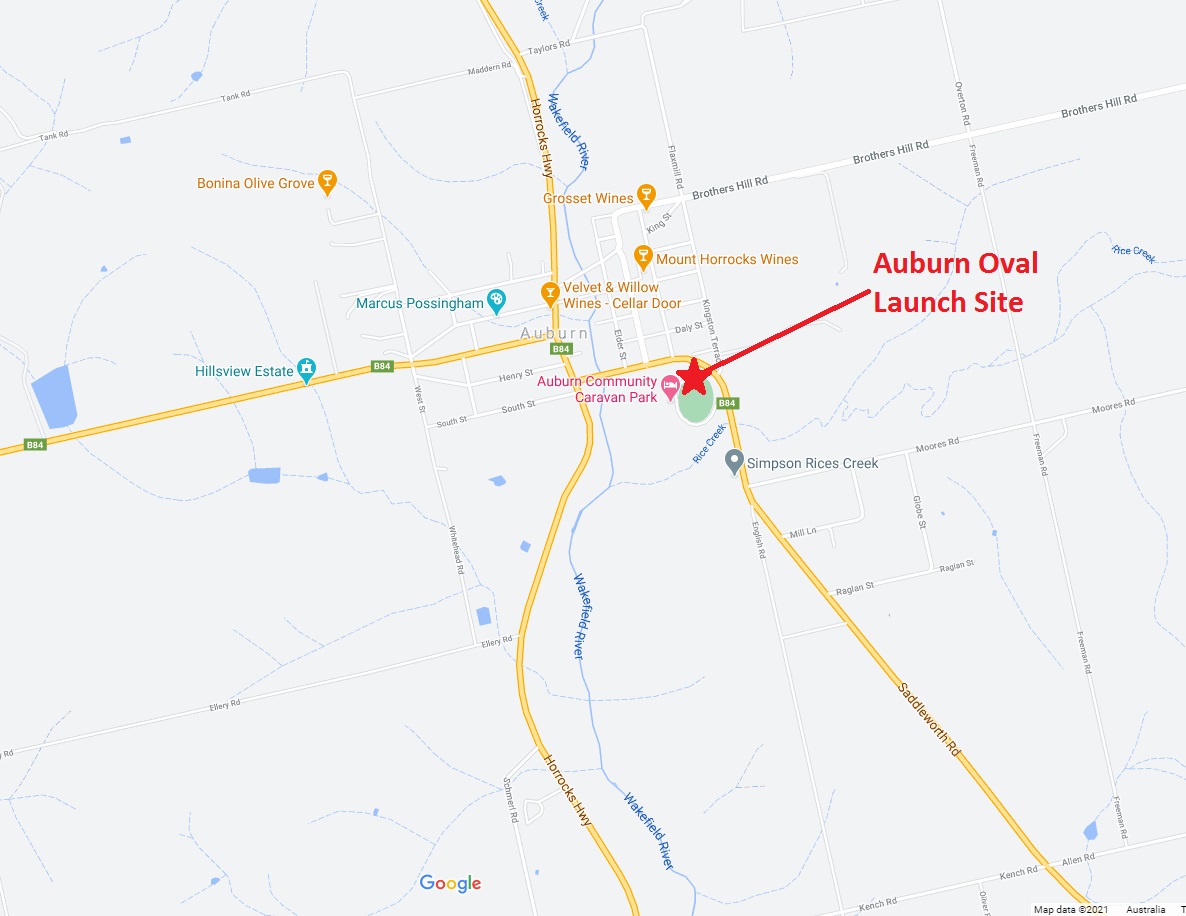
Horus 68 – 14th December 2025 – Student Payload Launch
Horus 68 was the follow-up to November’s launch, with the aim of finally launching the two winning LaunchBox payloads. This was a much quieter launch compared to the last, with a small team performing the launch from the Mt Barker High School oval, with the student teams watching the SondeHub tracker and live imagery online.
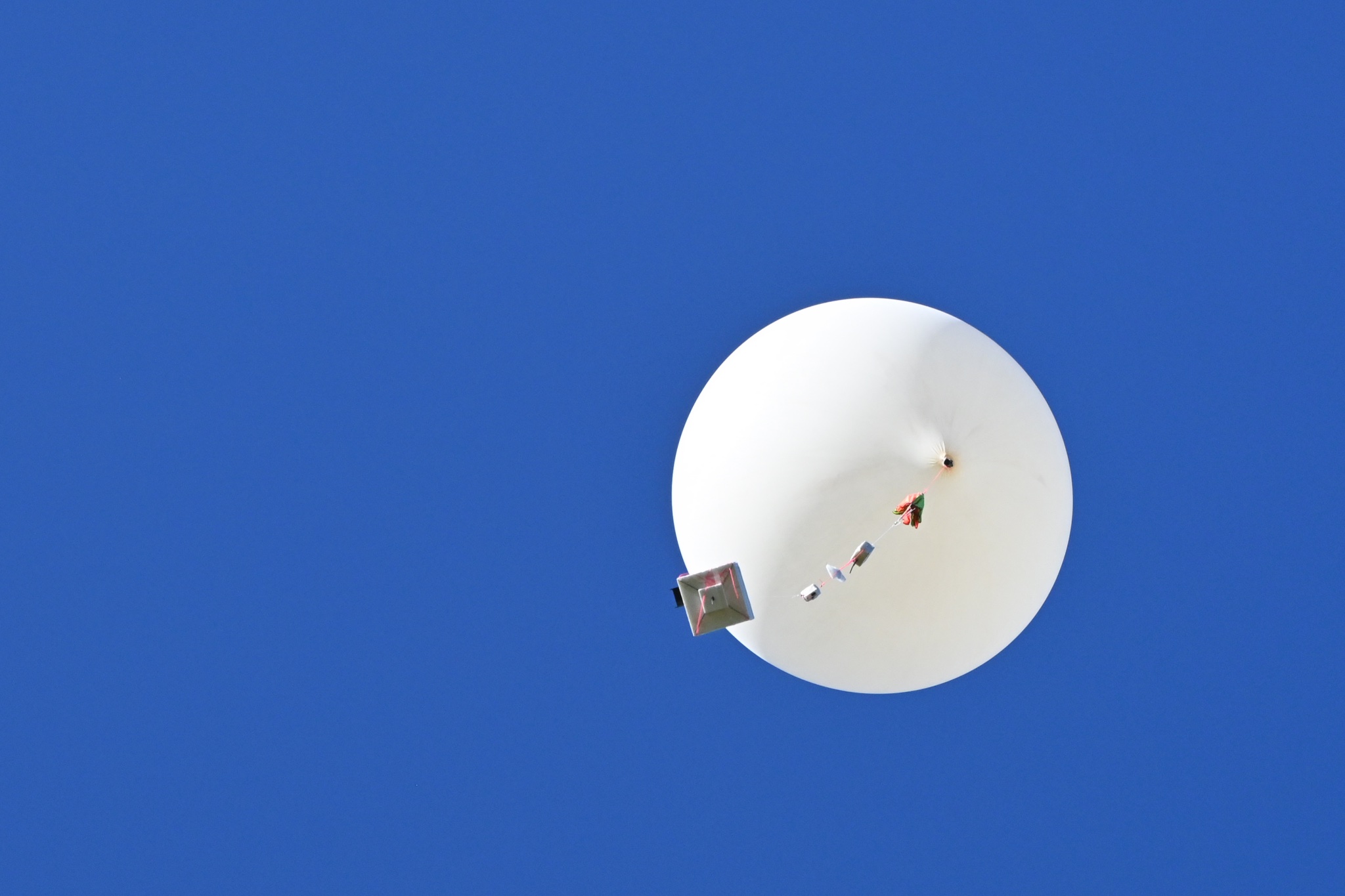
Graeme VK5RE captured the launch well:
With the payloads on their way, the launch team quickly packed up and departed for the predicted landing area near Nildottie. Peter VK5KX and Matt VK5ZM were setup on a lookout overlooking Palmer, running the primary ground station for this flight. Peter also had a 915 MHz Yagi on his tracking mount, with Ed from Robinson Aerospace receiving telemetry from the RASCube-LB payloads.


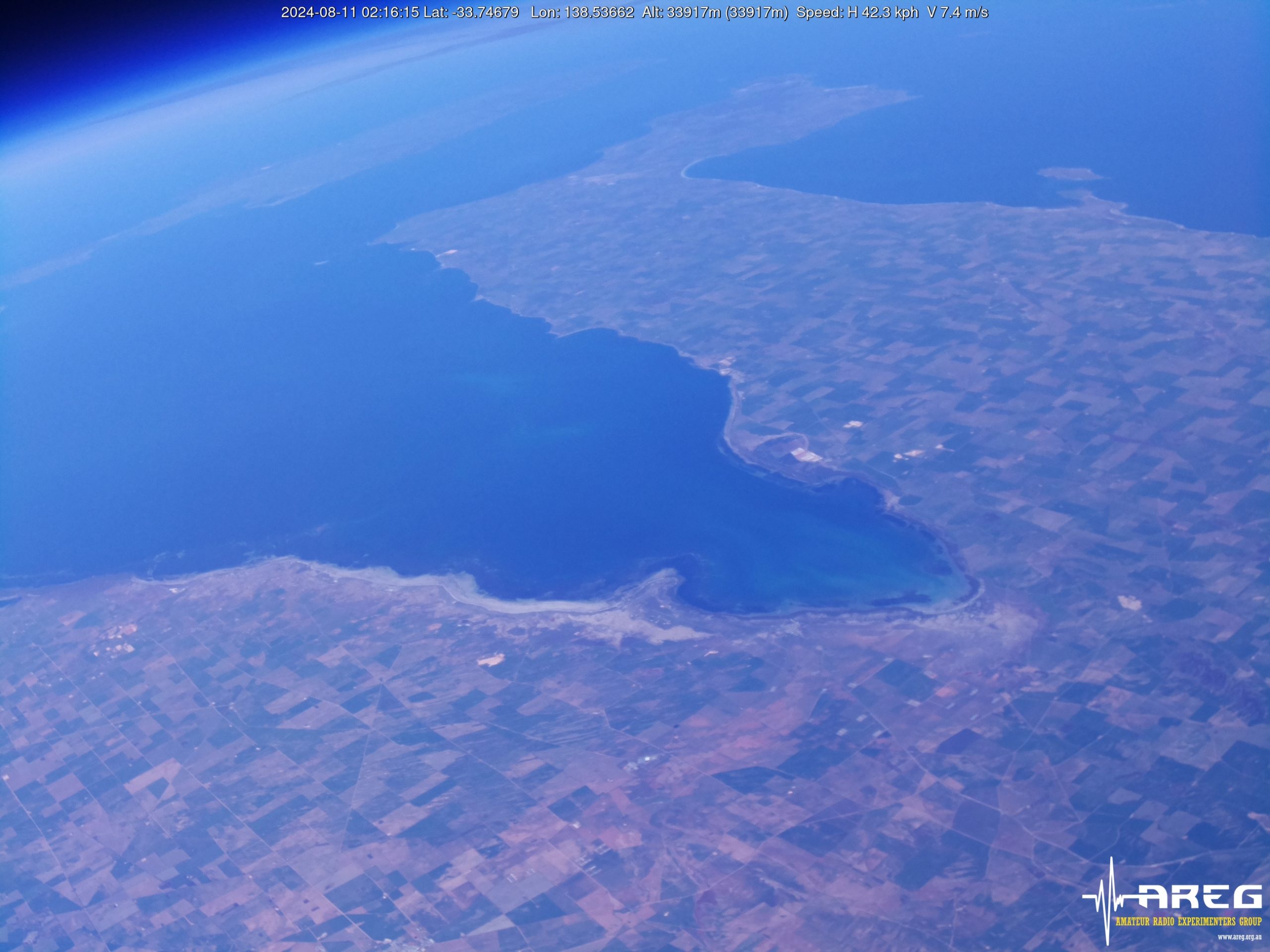
Despite some signal fading due to the payloads swinging around, we had excellent imagery reception throughout the flight:





















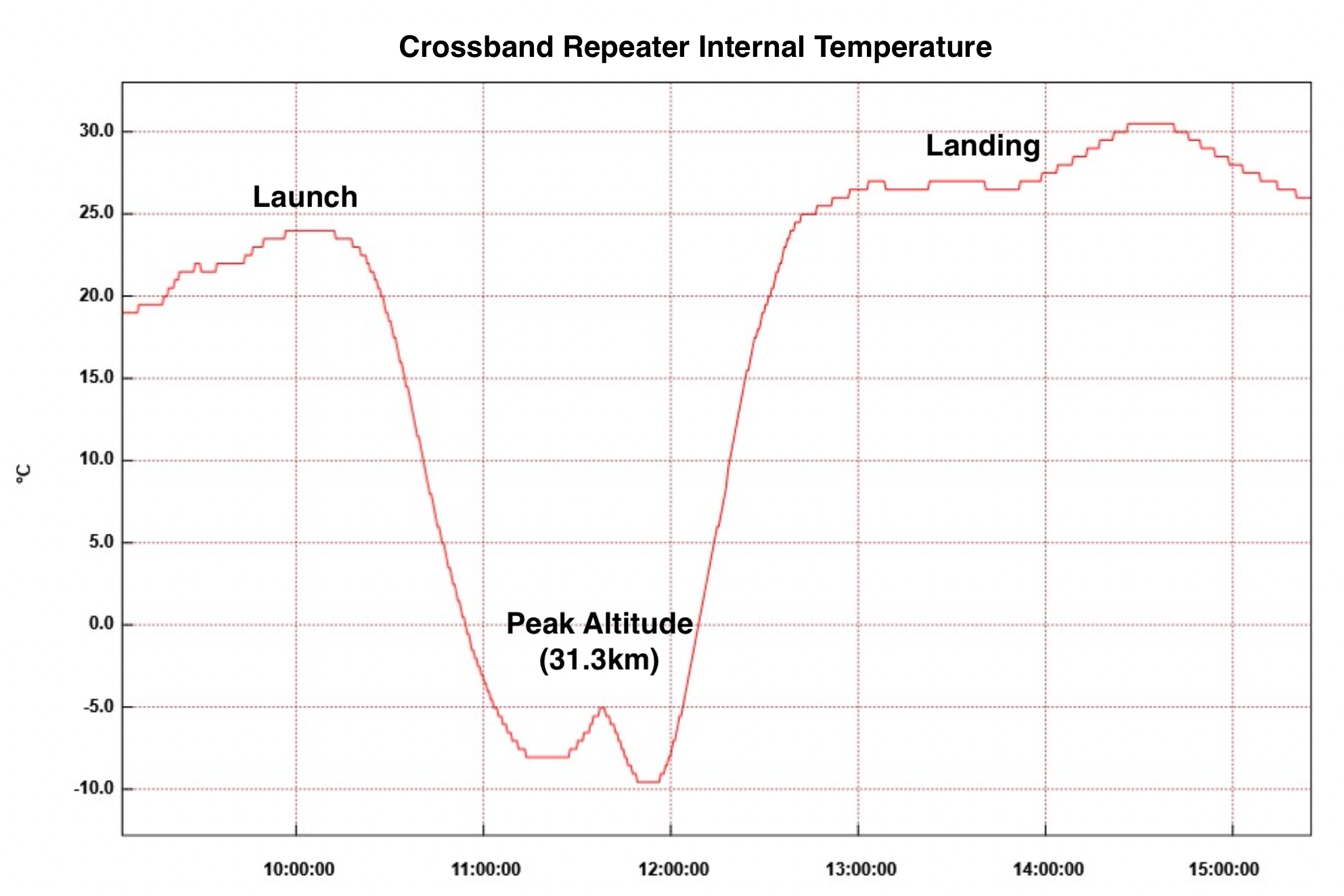
Balloon burst occurred as expected, just above 31km altitude, and the payloads descended to a landing a few km to the east of Nildottie. After obtaining access permission from the landowner, the chase teams were able to drive in and recover the payloads which were all in good condition.




Horus 68 (LaunchBox Student Payloads) Flight Statistics
| Launch Date: | 2025-12-13T23:31:12Z |
| Landing Date: | 2025-12-14T01:43:41Z |
| Launch Site: | -35.07579, 138.85651 |
| Landing Site: | -34.67255, 139.69974 |
| Distance Travelled: | 88 km |
| Maximum Altitude: | 31042 m |
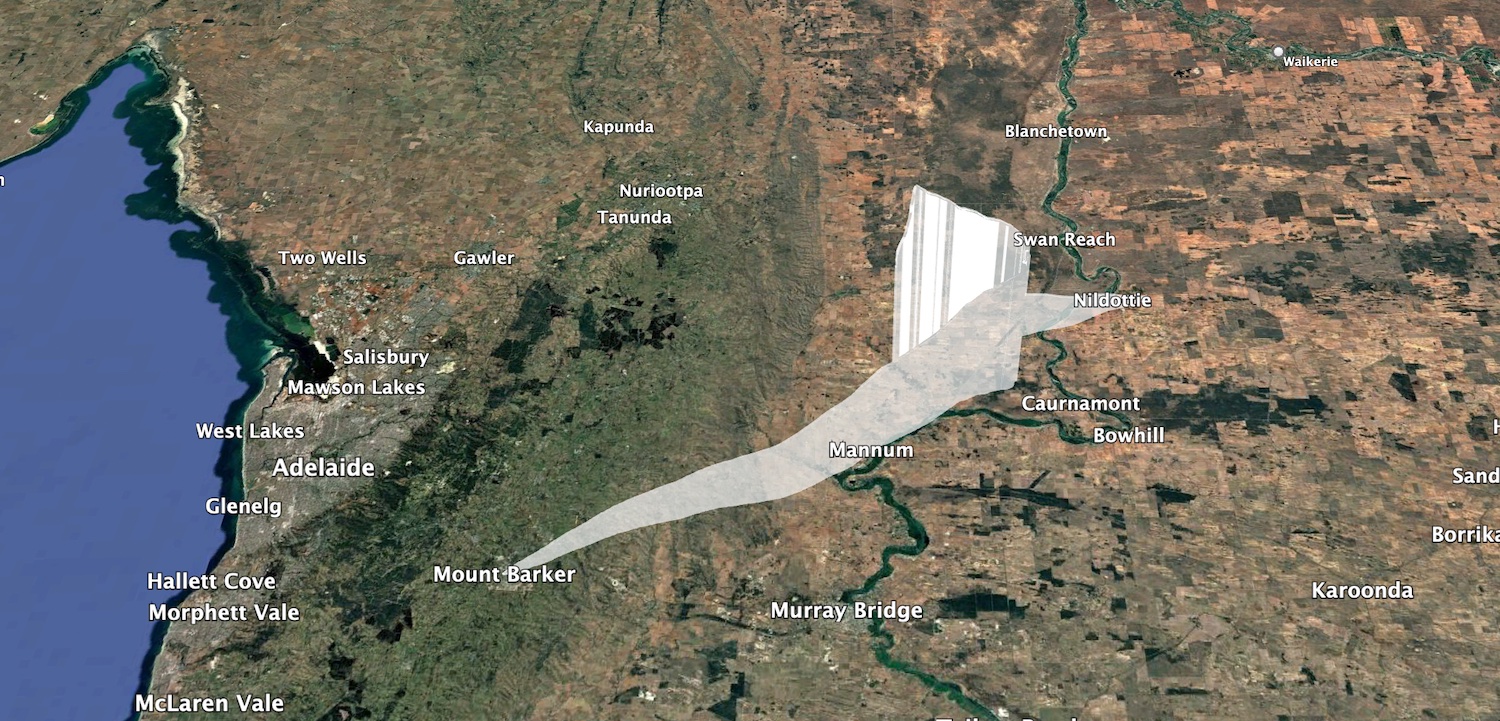
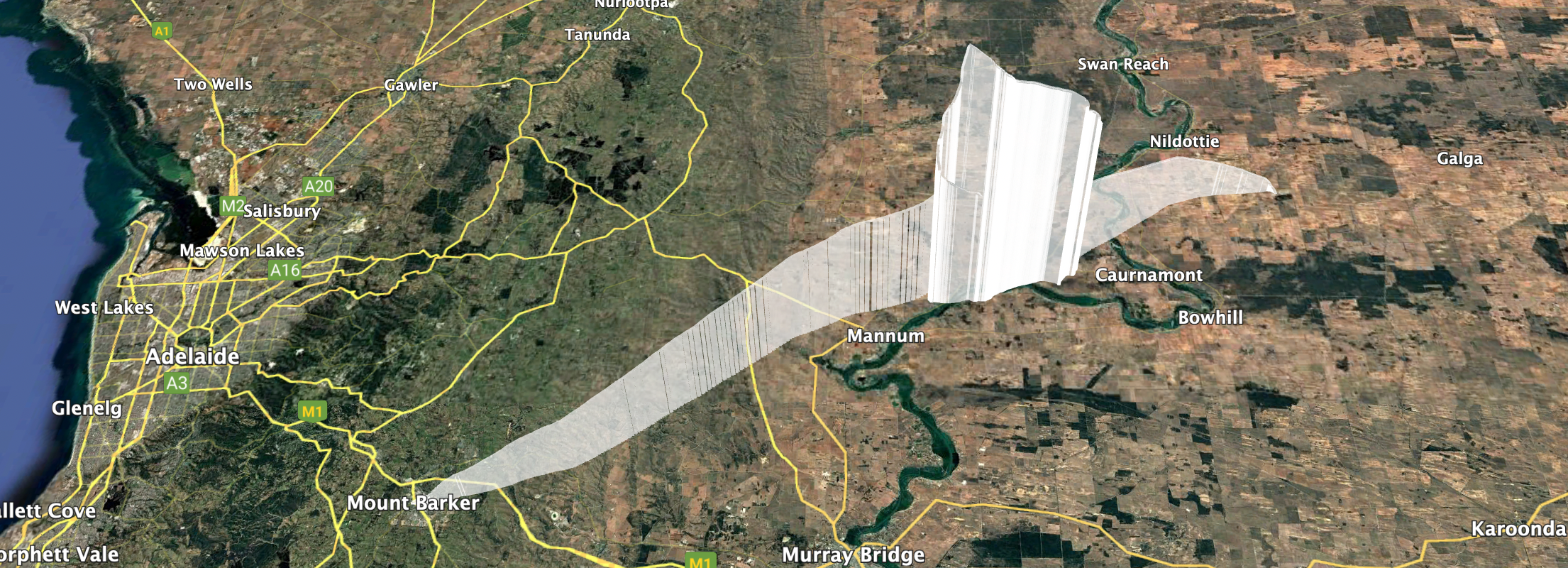
Horus 68 Flight Path
Telemetry Reception Stats
The primary tracking payload (HORUS-V2) was received by the following stations: BARC-RRR,VK3BKQ,VK3IDK,VK5AI,VK5AKK,VK5AKK-1,VK5ALG,VK5ALG-9,VK5ARG,VK5BL,VK5CV,VK5FD,VK5GY,VK5HW,VK5KX-9,VK5KX-i5,VK5LN,VK5NE,VK5NEX,VK5OCD,VK5QI-9,VK5RM,VK5SJ,VK5ST-4,VK5WE,VK5ZAP,VK5ZM,VK5ZMD,VK5ZRL,VK5RK,VK5IS,VK5ZMD
The backup tracking payload (VK5ARG) was received by: BARC-RRR,VK5ALG,VK5ALG-9,VK5ARG,VK5KX-9,VK5QI-9,VK5ST-4,VK5ZM,VK5ZRL/2
The furthest receiver was VK3BKQ, located near Melbourne at ~602 km range!
The Wenet imagery payload was received by:
- VK5ZM: 44491 packets (10.86 MB)
- VK5KX-9: 249921 packets (61.02 MB)
- VK5QI-9: 194109 packets (47.39 MB)
- VK5ALG-9: 41995 packets (10.25 MB)
- VK5IS: 506 packets (0.12 MB)
Dashboards showing detailed telemetry for each payload are available at the following links:
Conclusions & Upcoming Activities
Thanks to Fleet Space for running the LaunchBox program – we’re proud to be involved in this once again and to be able to share the fun of high altitude balloon launches and amateur radio with a wider audience! The LaunchBox program will be back next year, and you can expect at least 2 balloon launches as part of this.
We next expect to launch sometime in Early/Mid January 2026, making use of some leftover helium. This will likely comprise of 1 or 2 flights with Horus Binary tracking payloads onboard, and possibly a Meshtastic payload from the SA Meshtastic Users Group.
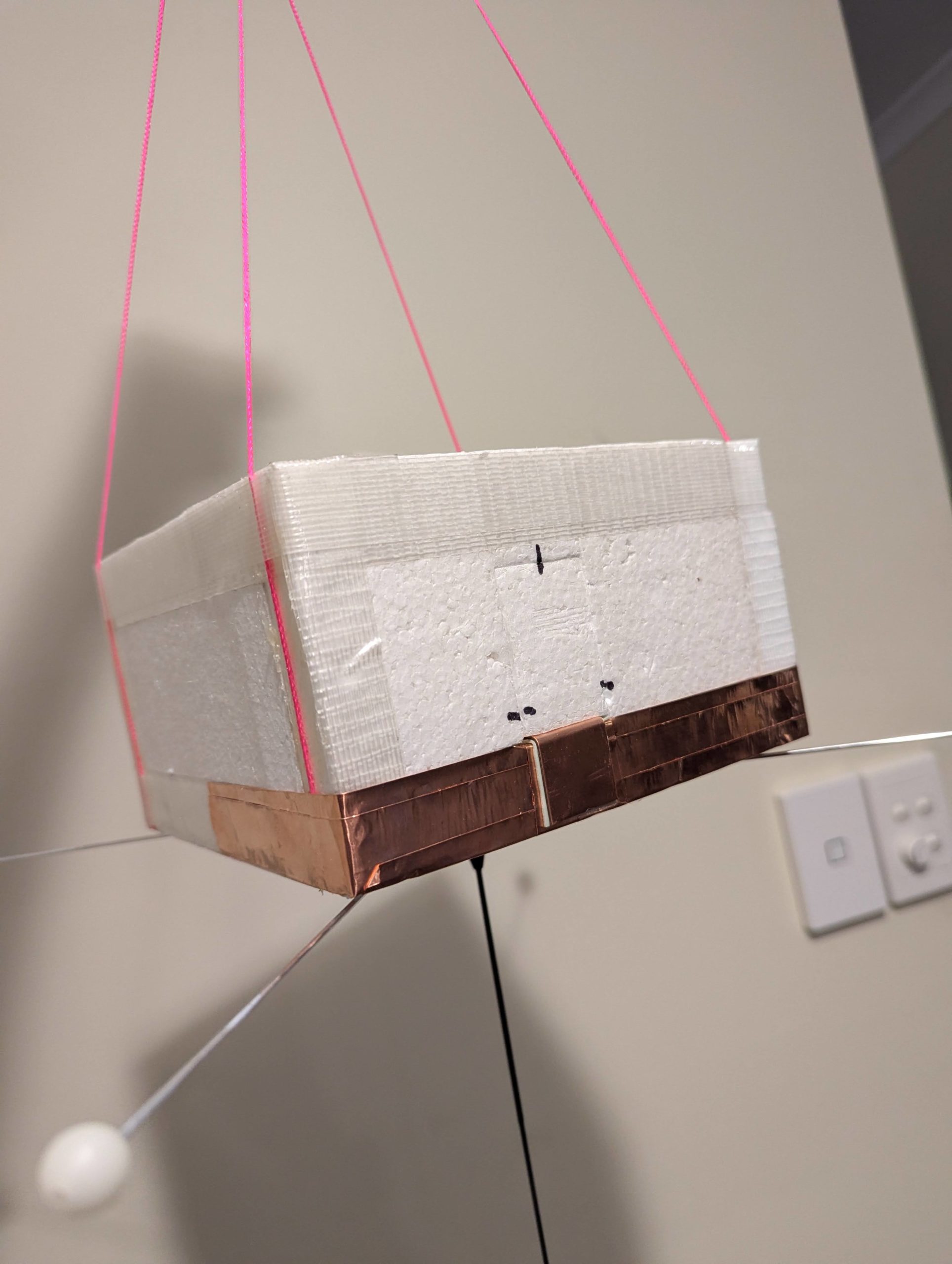
In 2026 we’re hoping to get back to launching some of our larger payloads, including the cross-band repeater and possibly even our DVB-S video payload – stay tuned!