
Horus 71 was a flight for Fleet Space, as part of their 2026 LaunchBox STEM program. In this program, the participating schools compete to have their RASCube-LB flown under a high altitude balloon – launched by AREG!
This is the third launch we’ve performed for Fleet Space, with the previous two reported on in this post.
The winning schools this round were The Gap State High School in Queensland, and Ashdale Secondary College in Western Australia – congratulations to the teams!
Launch
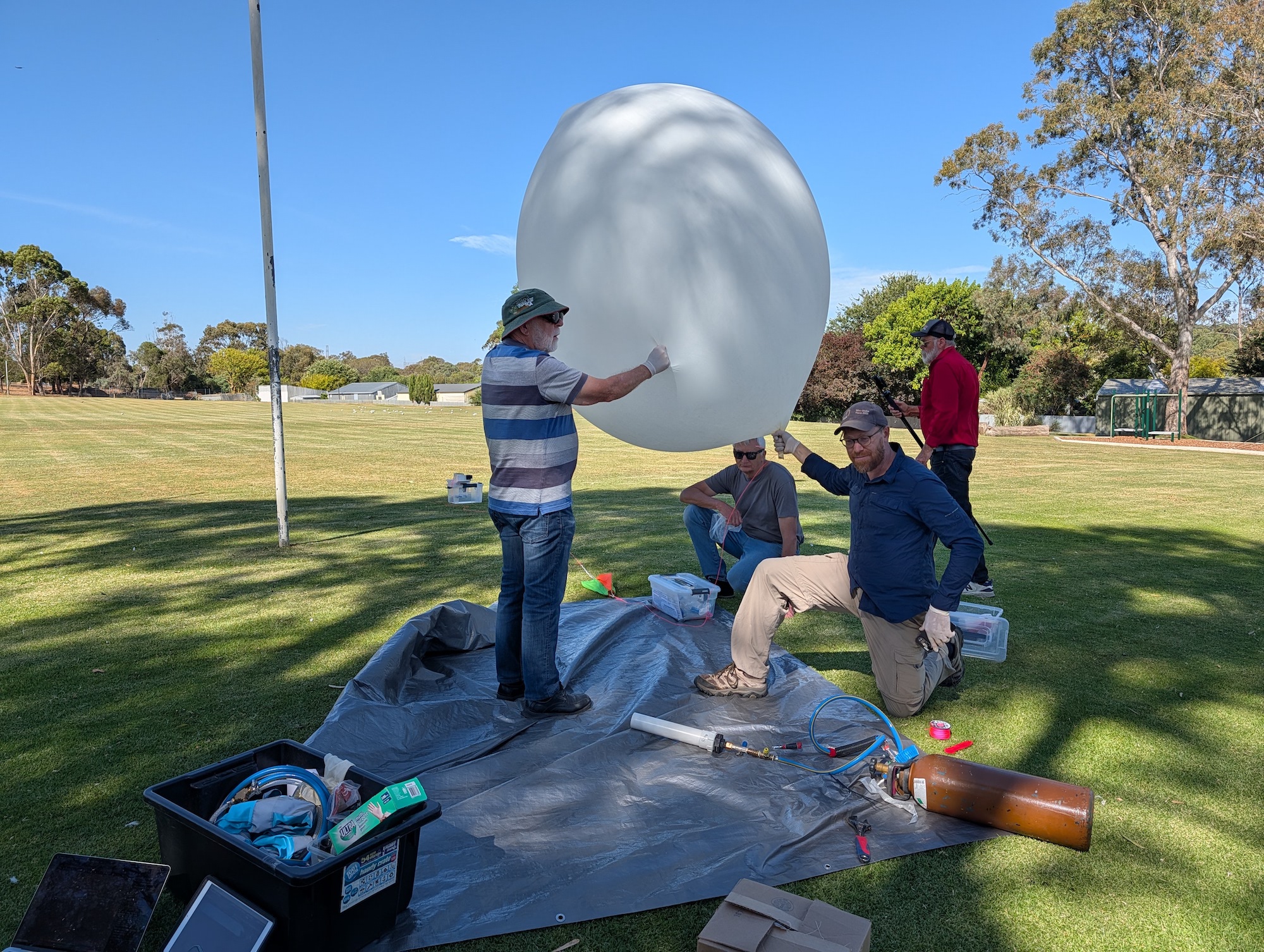
While we did have a lot of cloud cover (making day unsuitable for a launch of the CSIRO payload, still to be launched), we couldn’t have asked for calmer launch site weather! Setup for the launch and filling went smoothly, with many helpers on-site to make things easier. At the launch site we also had Ed from Robinson Aerospace, capturing video of the event on behalf of Fleet Space, to share with the student participants.
The balloon train was able to be raised perfectly vertically into the air, and after a small delay to let a light aircraft clear the area, we had a short countdown and a perfect launch!
Thanks to Andy VK5AKH for the launch footage!
Chase & Recovery
Out on the chase this flight were:
- Mark VK5QI, Will VK5AHV and Autumn VK5CLD
- Ed Robinson & Father
- Peter VK5APR
With the predicted flight path heading out towards Karoonda, the chase teams headed off to Tailem Bend to grab an early lunch. While waiting around, they noticed the balloon had burst slightly earlier than expected at an altitude of 26.969 km, somewhat lower than the expected 31 km. The teams quickly ran back to their cars and headed off for the landing area, which ended up being only 24km to the west of Tailem Bend. The last few km of the descent dropped almost straight down, and the teams were able to get in position to watch the payloads land (with a bit of a bounce!) in an empty paddock (footage from Autumn VK5CLD):
Horus 71 Flight Statistics
| Launch Date: | 2026-05-17T00:48:30Z |
| Landing Date: | 2026-05-17T03:03:24Z |
| Launch Site: | -35.07579, 138.85710 |
| Landing Site: | -35.22105, 139.71689 |
| Distance Travelled: | 79 km |
| Maximum Altitude: | 29629 m |
Horus 71 Flight Path
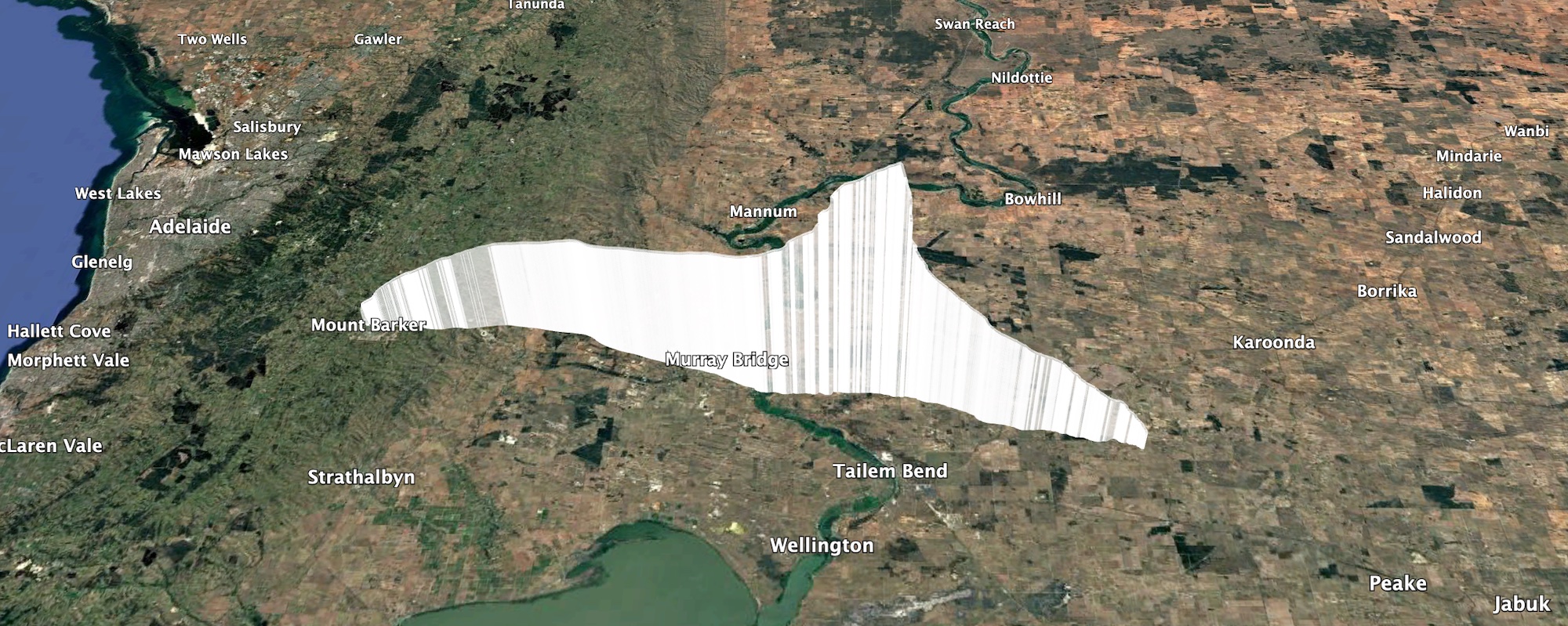
Wenet Payload & Imagery
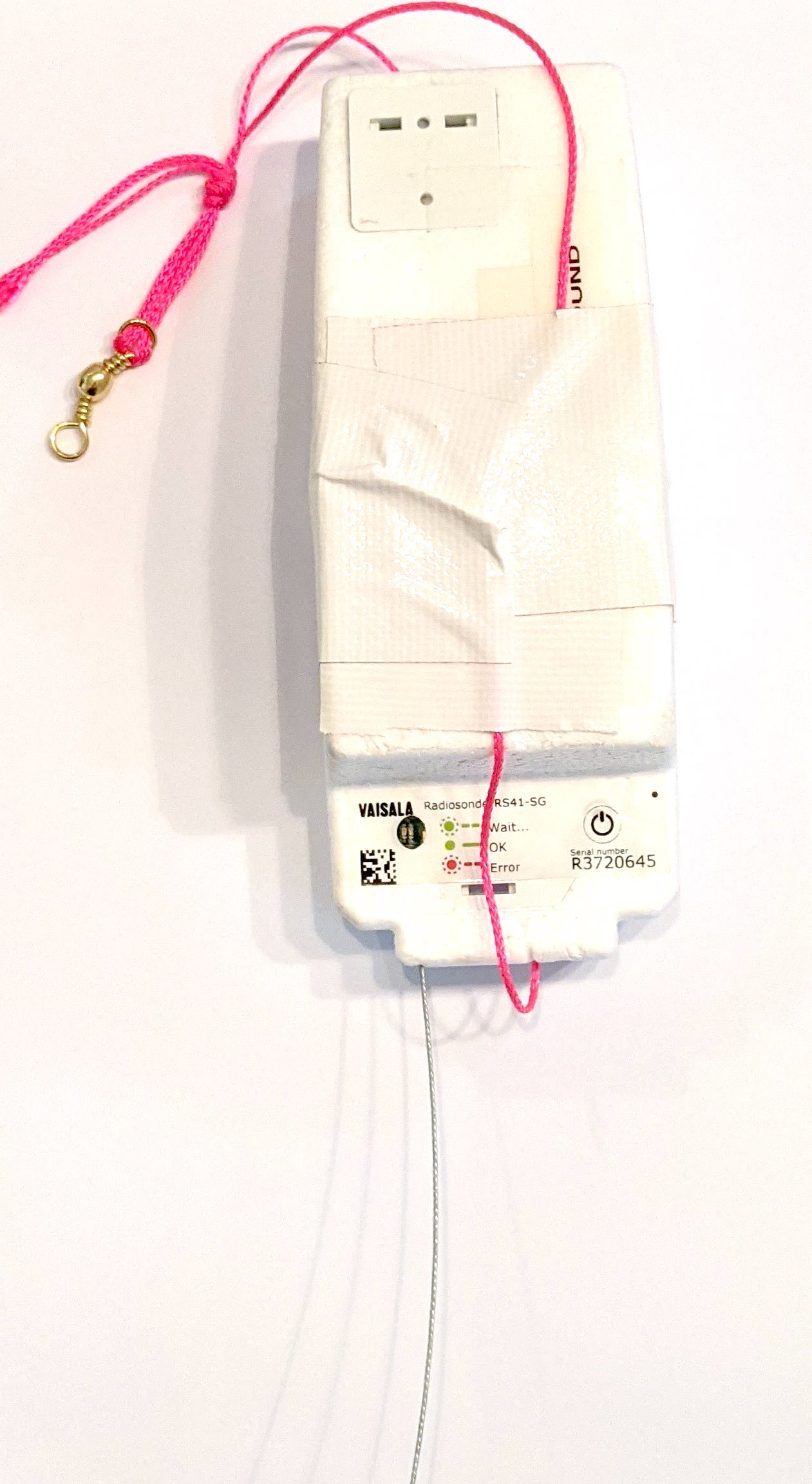
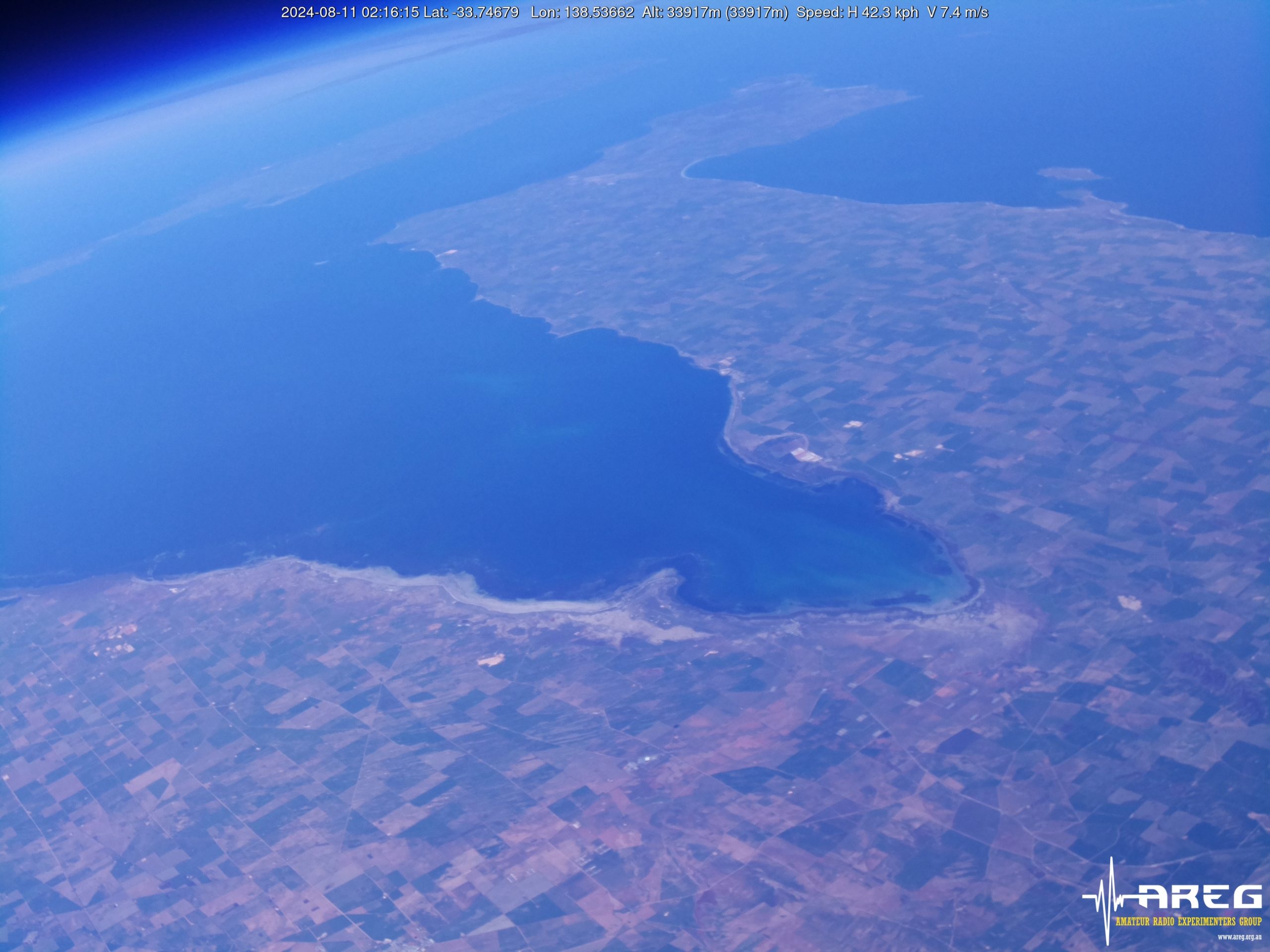
Due to the issues with the ‘HQ’ imagery payload, the Wenet payload on this flight was using a PiCamera v2. Usually we have good success with these, but unfortunately it looks like newer models of these still have thermal drift problems. During this launch we noticed the focus drifting out of alignment as we passed into the tropopause. Still, we ended up with quite a few nice photos! We’re hoping to have the Wenet ‘HQ’ payload back in operation for the next launch.
















Thanks to Peter VK5KX for setting up his excellent ground station to receive imagery on this flight! His station received the bulk of the image data that was seen live on the web, with a small amount coming from Mark VK5QI’s chase car receiver.
Telemetry Reception Statistics
On this flight we had the following receivers for the telemetry payloads:
- Primary (‘HORUS’): BARC_RRR, Gum, VK3APJ, VK3BKQ, VK3BQ, VK3TAP, VK5AH, VK5AI, VK5AKK, VK5ALG, VK5APR, VK5ARG, VK5BRL, VK5DLW, VK5DSP, VK5FD, VK5GA, VK5GY, VK5HW, VK5KX, VK5KX-9, VK5LN, VK5NEX, VK5OCD, VK5QI-1, VK5QI-9, VK5ST-5, VK5TUX, VK5ZAP, VK5ZAR, VK5ZMD, VK5RK, vk5is, vk5mhz, webhorus-p9zuu5
- Secondary (‘VK5ARG’): BARC_RRR, VK3APJ, VK3BKQ, VK3BQ, VK5ALG, VK5APR, VK5ARG, VK5BRL, VK5KX-9, VK5QI-9, VK5ST-5
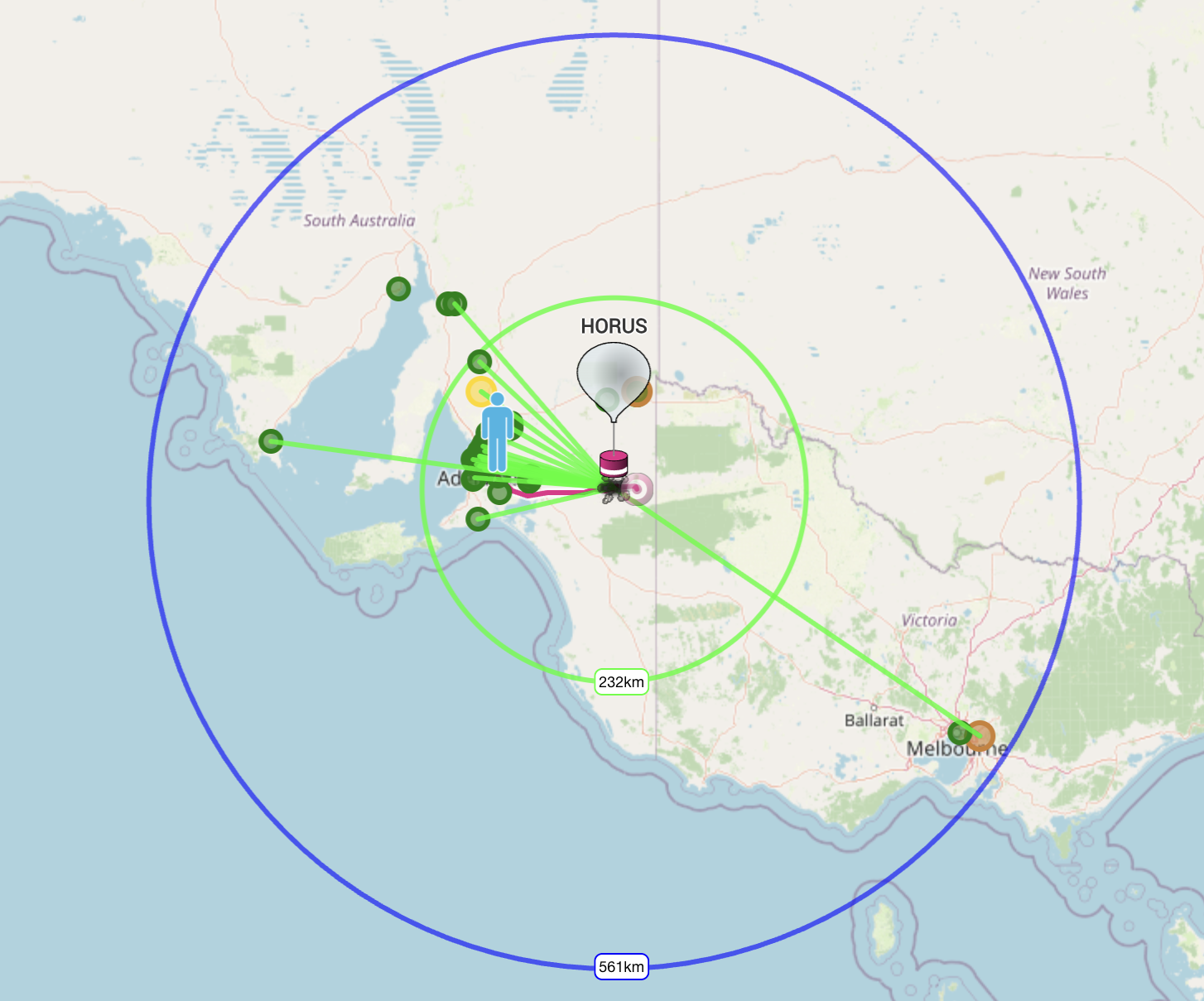
The longest receive distance was by VK3TAP, at a range of 627km!
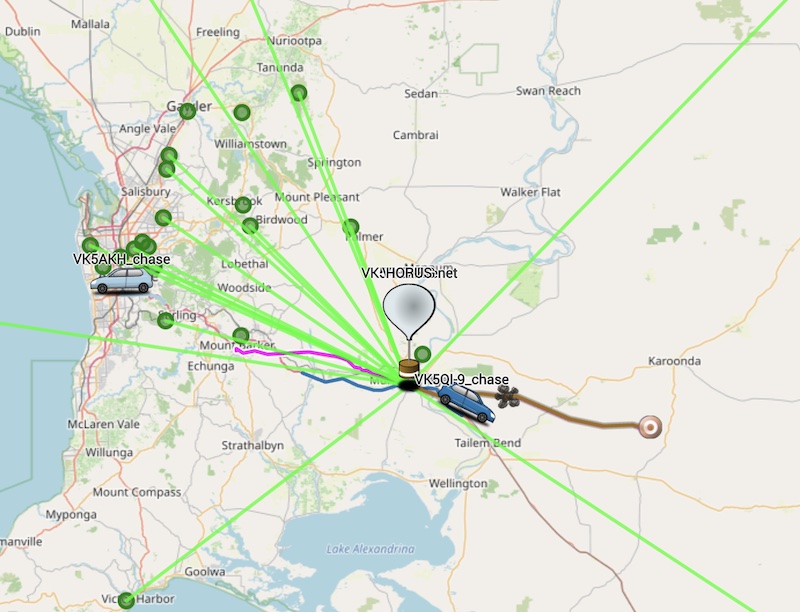
SondeHub-Amateur Tracker Showing Horus 71 flight and receivers
You can find dashboard with per-receiver reception information at the following links:
- HORUS: https://grafana.v2.sondehub.org/goto/iIqJZjADR?orgId=1
- VK5ARG: https://grafana.v2.sondehub.org/goto/WgJ_WCAvR?orgId=1
Thanks to everyone that helped received telemetry on this flight!
Next Launches
Our next launch will most likely be for CSIRO – we’ll be looking out for a weekend with clear weather to get their imaging payload in the air. This could be happening as soon as the 14th of June, however given the generally poor weather we have in Winter, we can expect this to shift to the right. Stay tuned to this website and the VK5 local broadcast for launch updates.
Following this, we hope to finally fly the VHF/UHF cross-band repeater again, hopefully sometime in July/August.





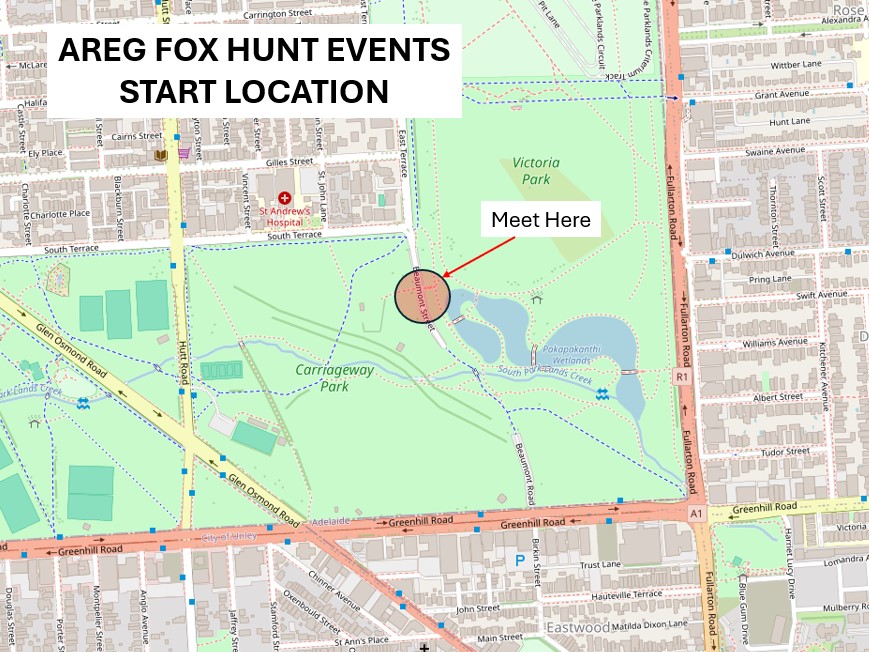
 Project Horus’s next launch is currently planned for Sunday the 17th of May, with a backup date the following weekend. Launch time is planned for 10AM, with launch crew on-site around 9:15AM.
Project Horus’s next launch is currently planned for Sunday the 17th of May, with a backup date the following weekend. Launch time is planned for 10AM, with launch crew on-site around 9:15AM.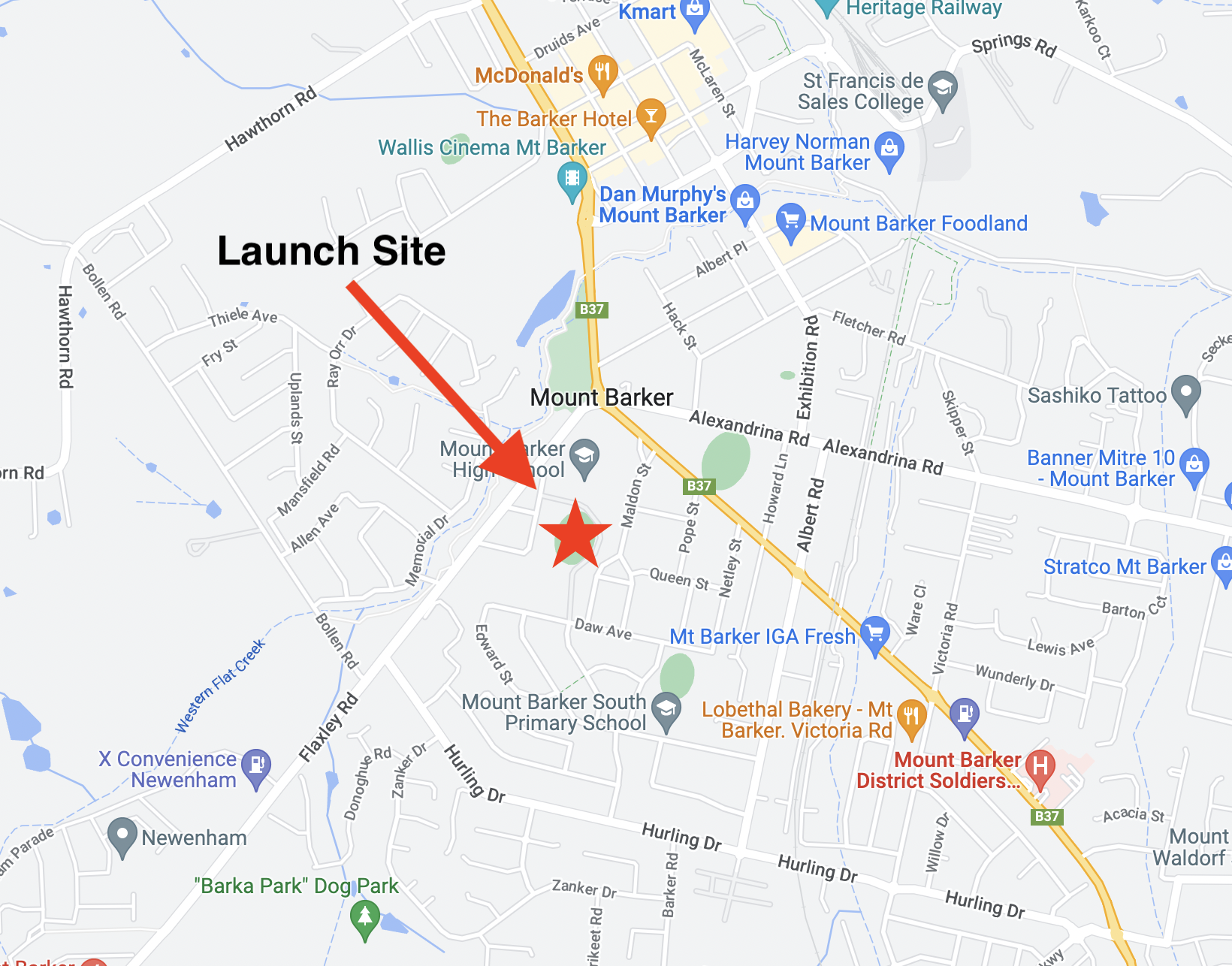













































{kind=link}