During the 2010’s AREG used to regularly enter the John Moyle Field Day contest hosted by the WIA. For various reasons that activity waned in the last 4-5 years. So this year, we felt it was time to re-enter the event and introduce the next generation of AREG members to domestic field day contesting.
VL5X Portable Hindmarsh Island – Multi-Op SSB Portable
Given this is a “Field Day”, it really needed to be a in the field club activity. That is what puts the “field” into the event after all. This year we were fortunate, through a friend of one of our members, to gain access to a 10 acre plot on Hindmarsh Island, about 90 minutes out of Adelaide. The site, which had a 10-15m hill at the back of the property and a couple of sheds in the middle was perfect and allowed us to spread the antennas out so we could operate a multi-operator station without causing interference between the bands.
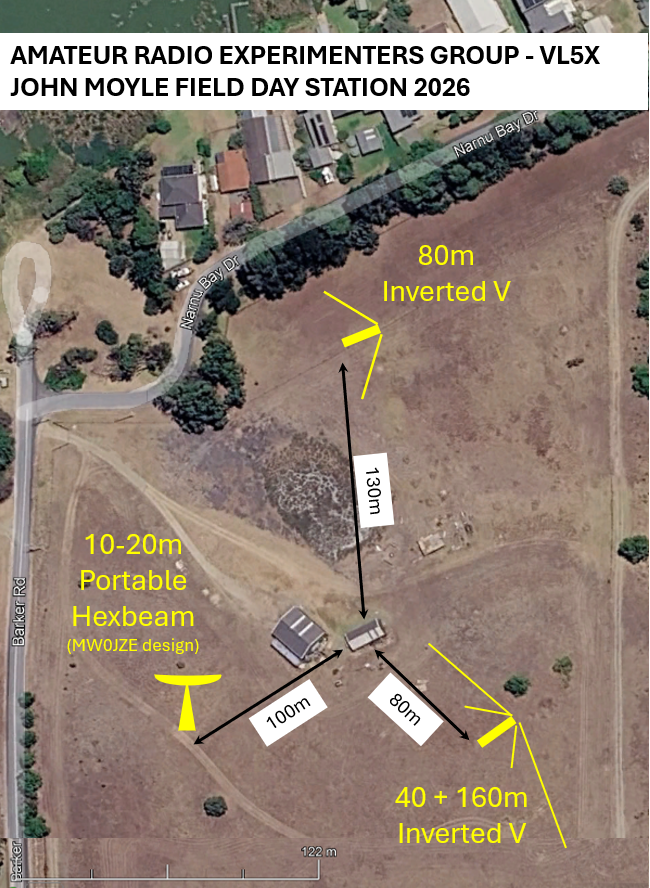
Station Antenna Farm








Unique “Quick Deploy” Station experiment
One of the unique tricks used in this contest was Andy VK5AKH’s quick deployment station. He hired a van for the weekend, rolled his portable operating desk inside, loaded it up with gear and away he went. He was on air within an hour of arriving on site supporting our full 40m station.

 Powering The Station
Powering The Station
We set up three 400W portable contest stations on the site and then proceeded to power them as follows:
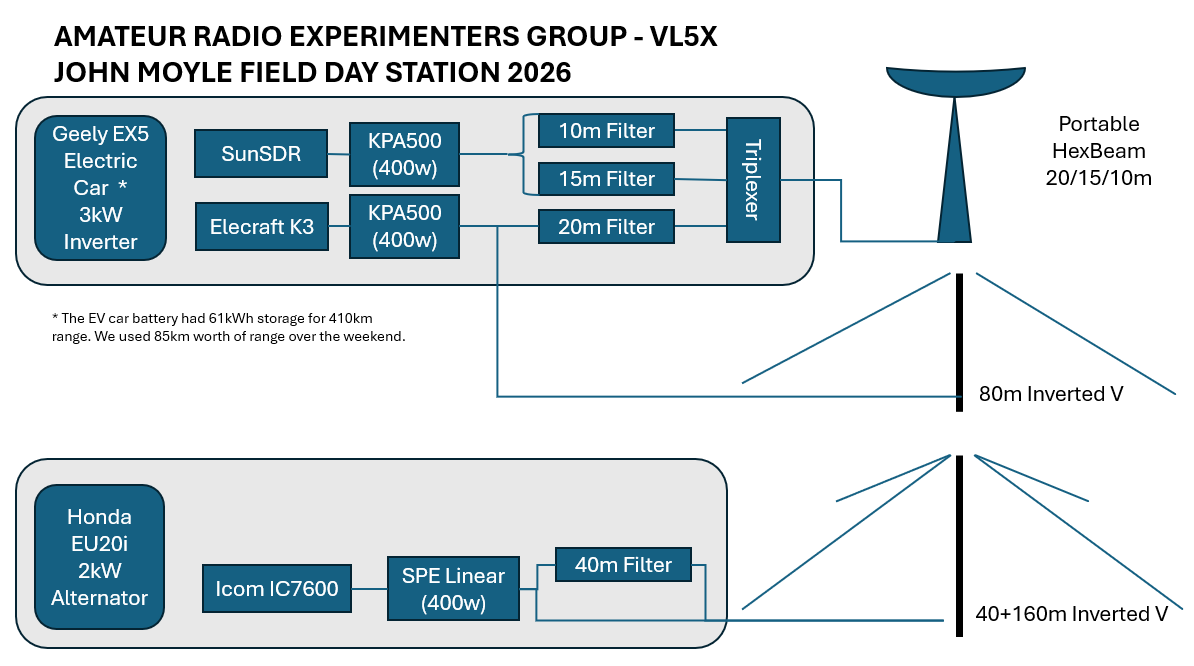 We had 3x Honda EU20i generators on site, originally planning that as our base load generation, given this contest did not permit us to use the mains to run the station. However, we also had something new that we had never tried before.
We had 3x Honda EU20i generators on site, originally planning that as our base load generation, given this contest did not permit us to use the mains to run the station. However, we also had something new that we had never tried before.
One of our members owns a Geely EX5 electric car. This car was unique in that it came equipped with a 3kW 240 Volt AC inverter, which we could use to draw power from the car’s 61kWh battery! Before the event, we were pretty trepidatious – concerned that the car would generate a lot of RFI and interference across HF. To our very happy surprise, however, the car was as quiet as a church mouse. In the end, we ran 2 of the three stations on the car inverter for the whole event. In the process, we invented a new unit of electrical consumption – “equivalent kilometres”. The two stations connected to the car, each with their respective 400W linear amplifiers, used a total of 65km worth of electricity. Not bad given the car has 410km of road range. This really does open up a whole new world for field day contesting into the future!
VL5X On The Air
As for operating the contest, we had a great turnout of operators, with VK5AKH, VK5QI, VK5FLY, VK5DUG, VK5VC, VK5FJ, VK5IR, VK5GR, VK5MN, VK5CIA. We also had a great roster of volunteers who helped construct and support the station including VK5ZM, VK5BX, VK5AG, VK5ZQV, VK5SAW, VK5KX, VK5AOK and others plus we had visits from Sue VK5AYL and David VK5ZL who were also interested to see what we were up to here at AREG.
We had operators as young as 10 yrs old (Douglas VK5DUG supported by dad Louis VK5FLY) right through to some in their mid 70s who remembered the John Moyle field day from a decade ago and wanted to come back and have another go. It was great to see them all getting into the spirit of the contest.

























The crew was well looked after as well with support from Michael VK5MN who managed the catering and Jeremy VK5CIA who provided the bathroom facilities from his holiday home nearby. All the little things that become big issues when you are out in the field!





Thanks to Theo VK5IR, we also have a short film showing the setup including a few more details about the car we used to power the station and showing some of the on air activity including young Douglas VK5DUG who operated for us on several bands.
So how did we go?
Results are not out yet, but we were pretty happy with our score. We had the station manned for 22 of the 24hrs of the contest, and due to the lack of contestants during the night spent at least 2 hours calling with no answers. None the less, a great time was had by everyone. We look forward now to seeing the results and discussing what we might try next year!