Horus flights 70A & 70B were ‘test & tune’ flights, giving receiving stations a chance to update their decoding software to receive our new ‘Horus Binary v3’ telemetry mode. These were run on the 15th and 29th of March, with just a single tracking payload flown on each launch.
Horus 70A – 15th March 2026
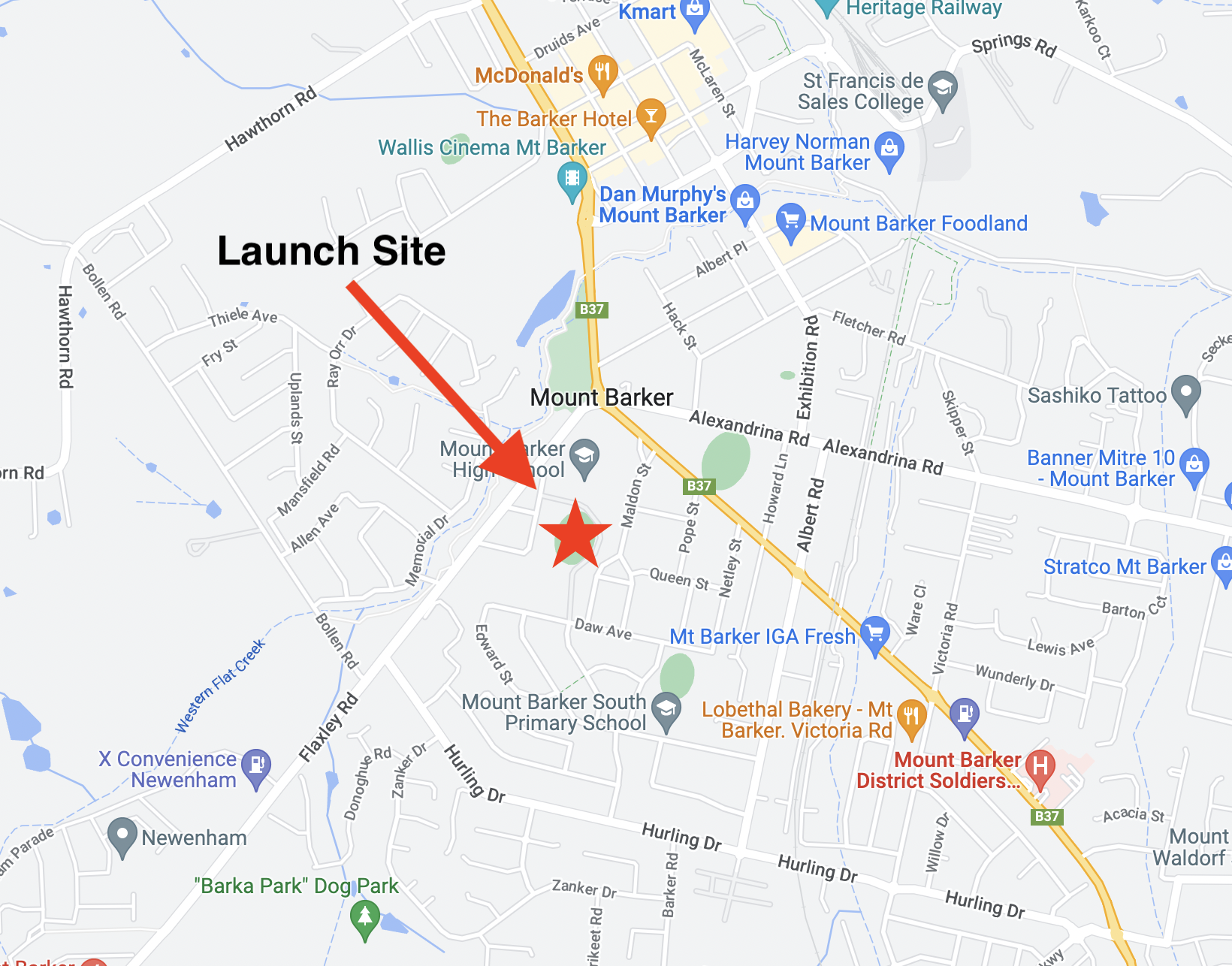
This was the first of the test & tune flights, launched at 10:30AM on a nice calm and sunny day at Mt Barker.

Waiting for launch!
The payload on this flight was a single Vaisala RS41-SGE radiosonde, reprogrammed with the RS41ng open-source firmware. A Hwoyee 200g balloon was used, with a slow ascent rate targeting around 23-34km burst altitude – we ended up achieving a burst of 28.7km! The payload landed in a paddock approximately 15km to the north of Lameroo.
We had a great turnout of receivers on this flight, with 34 stations uploading telemetry for the new Horus Binary v3 mode. These were as follows:
AX5AA, BARC_4, Gum, VK3BQ, VK5AI, VK5AKK, VK5ALG, VK5APR, VK5ARG, VK5BL, VK5CV, VK5DSP, VK5GY, VK5HS/p, VK5HW, VK5KX, VK5LN, VK5NEX, VK5OCD, VK5OI, VK5PJ, VK5QI-9, VK5SFA/R, VK5ST, VK5ZAR, VK5ZM, VK5ZMD, VK5ZMK, VK5ZTS, VK5RK, VK5IS, webhorus-jms, webhorus-jyyrhv, webhorus-p9zuu5
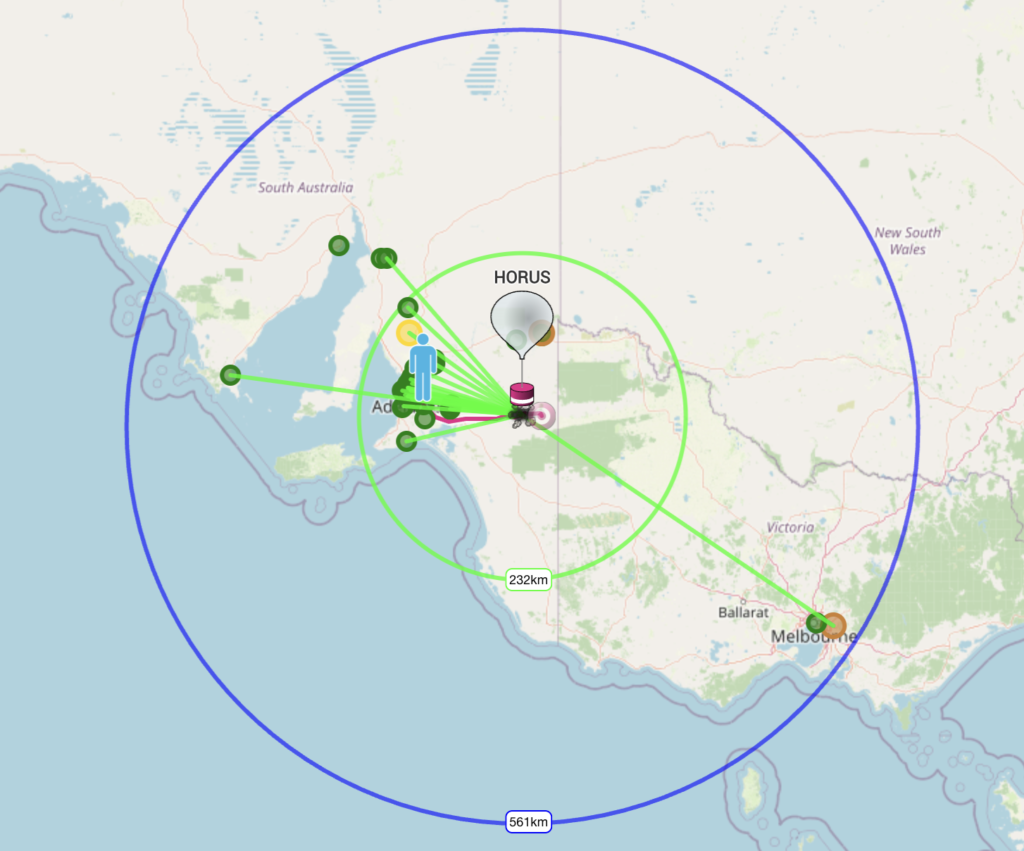
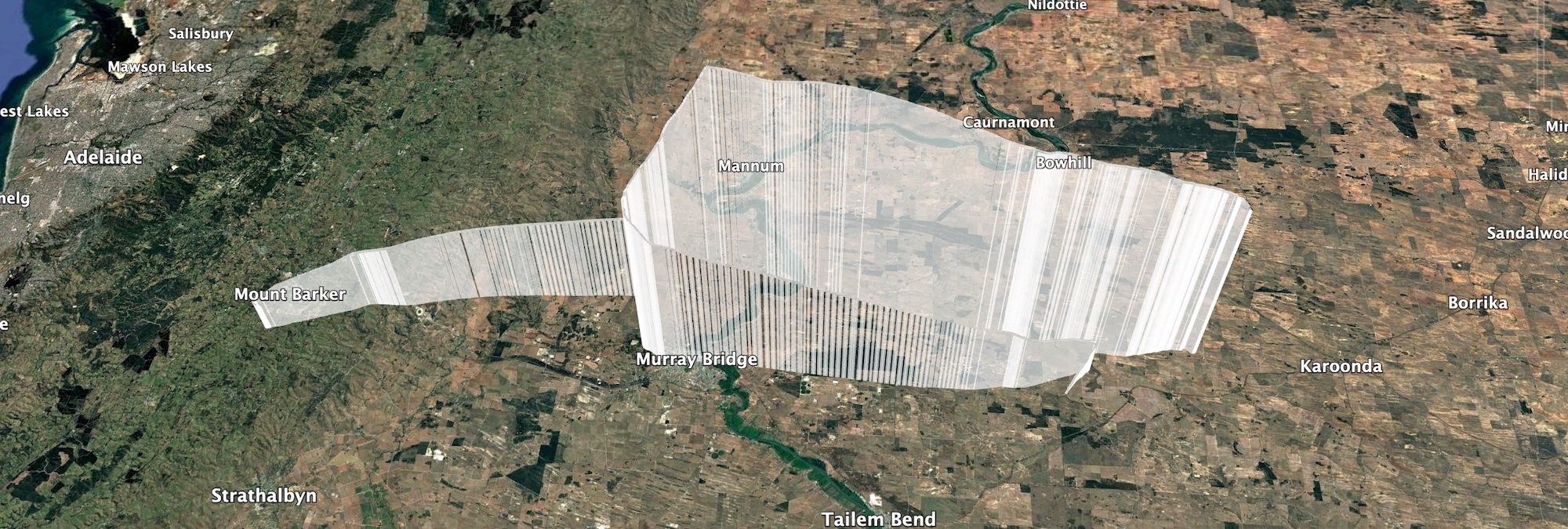
Horus 70A Receiving Stations (Green dots)
The longest received distance was to Andrew VK3BQ with a range of 529km, and the last packet was received by Ivan VK5HS at 113km range, both excellent efforts!
A dashboard for the flight is available by clicking here.
Horus 70B – 29th March 2026
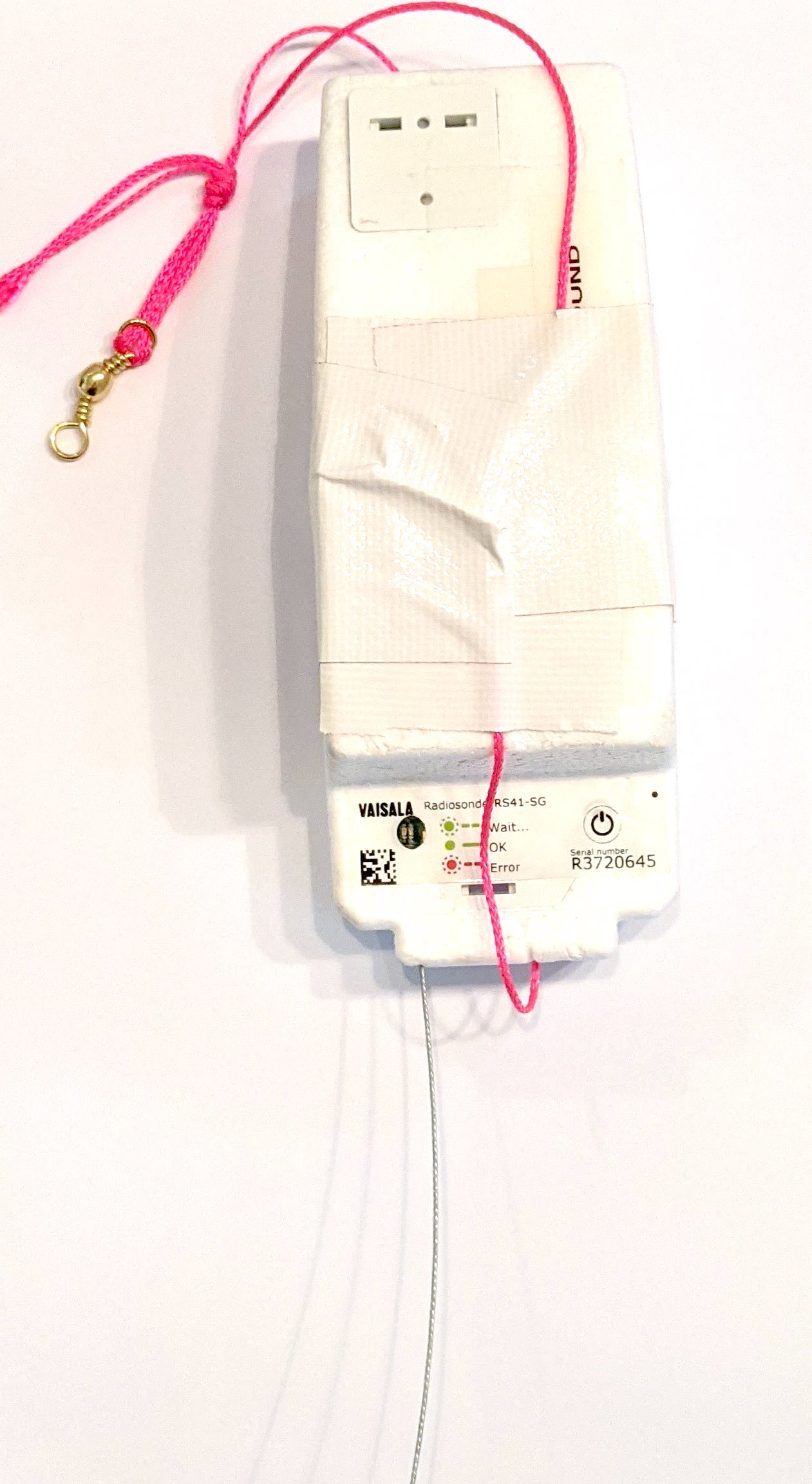
Another calm launch day! This time around we used a smaller 100g balloon, targeting about 20km altitude. The payload was also a re-programmed Vaisala RS41 radiosonde, however this time it was modified to run off a single AA battery. This reduces the runtime to < 8 hours, but also reduces the payload mass to less than 40 grams!

Horus 70B just before release.
We ended up with a slow flight tracking north from the Mt Barker launch site, ascending to 23825m before bursting and landing north of Kersbrook.
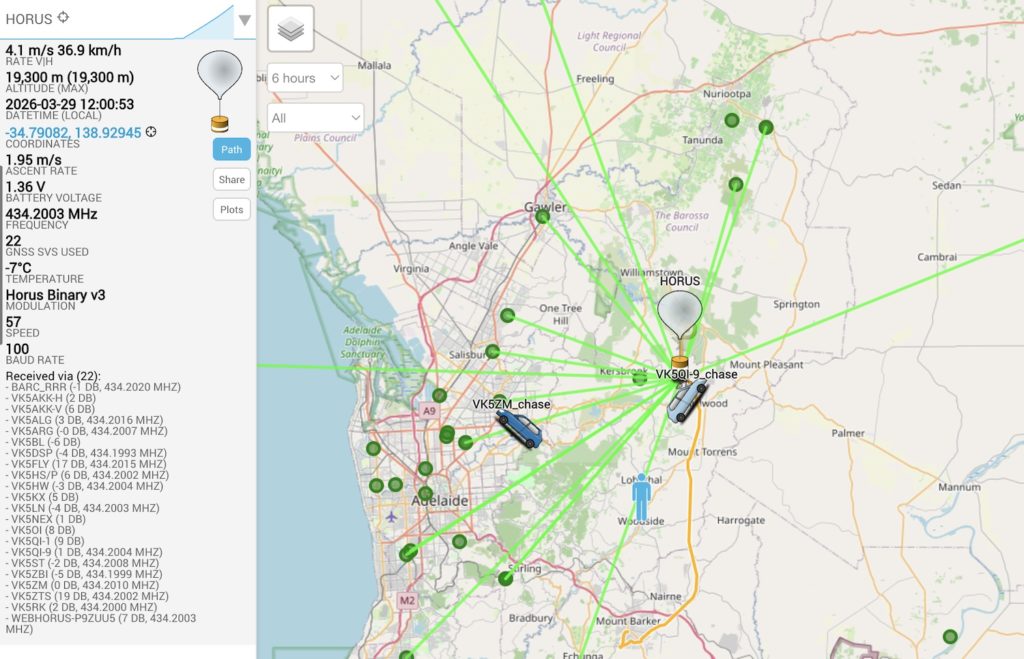
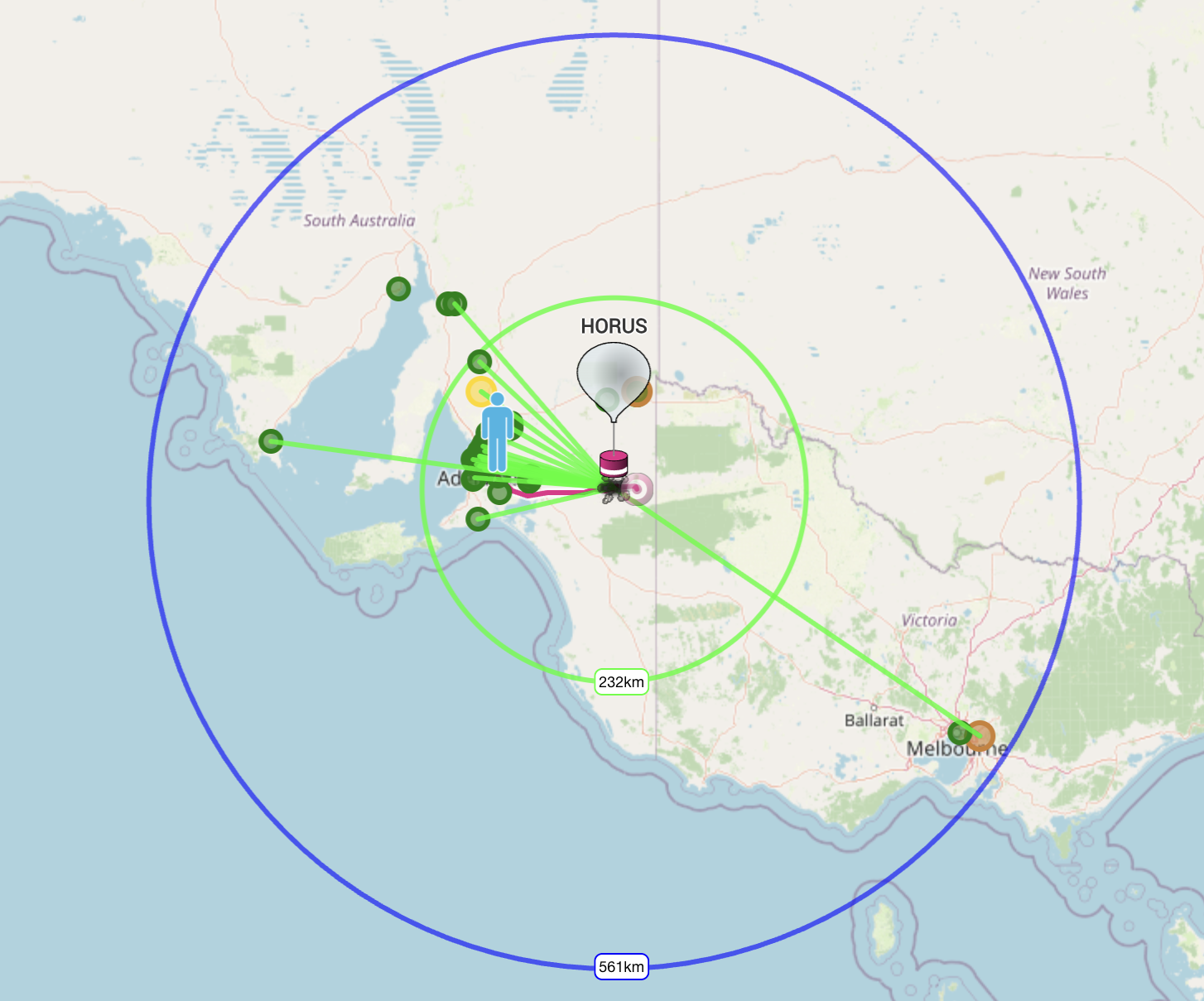
Screengrab of the Sondehub-Amateur tracker during the flight, showing many receiving stations
We had a great round up of receiving stations, with 34 unique callsigns contributing to the tracking effort! It was also great to see a few new callsigns on the list compare to the previous flight. The full list of receiving stations is as follows:
BARC_RRR, Gum, MILEEND, VK5AKK-H, VK5AKK-V, VK5ALG, VK5ALG Mac ,VK5APR, VK5ARG, VK5BL, VK5CV, VK5DSP, VK5FLY, VK5GA, VK5HS/p, VK5HW, VK5KX, VK5LN, VK5NEX, VK5OCD, VK5OI, VK5QI-1, VK5QI-9, VK5ST, VK5ZAP, VK5ZBI, VK5ZM, VK5ZMD, VK5ZTS, VK5RK, vk5is, vk5st-991, vk5zts-1, webhorus-p9zuu5
The longest reception on this flight was by Michael VK5LN in Pt Lincoln, at a range of 285km – great work Michael!
A dashboard for this flight is available by clicking here.
Next Project Horus Launches
Thanks to everyone that updated their tracking software and received these launches! We’re now much more confident in being able to move to Horus Binary v3 telemetry on our upcoming flights – having tracking redundancy through the many home stations receiving our flights really helps in ensuring they can be safely tracked and recovered.
Our next launch is planned to occur on Sunday the 26th of April, with a backup date on Sunday the 3rd of May. We are also expecting to perform a launch in mid to late May as part of the LaunchBox program. More details on these launches should be release in the next few weeks!

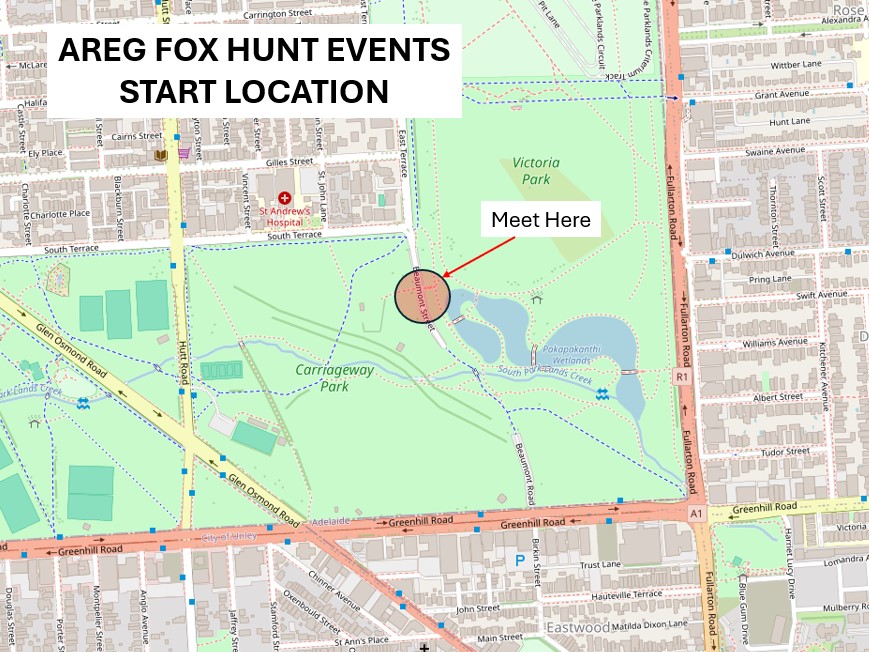
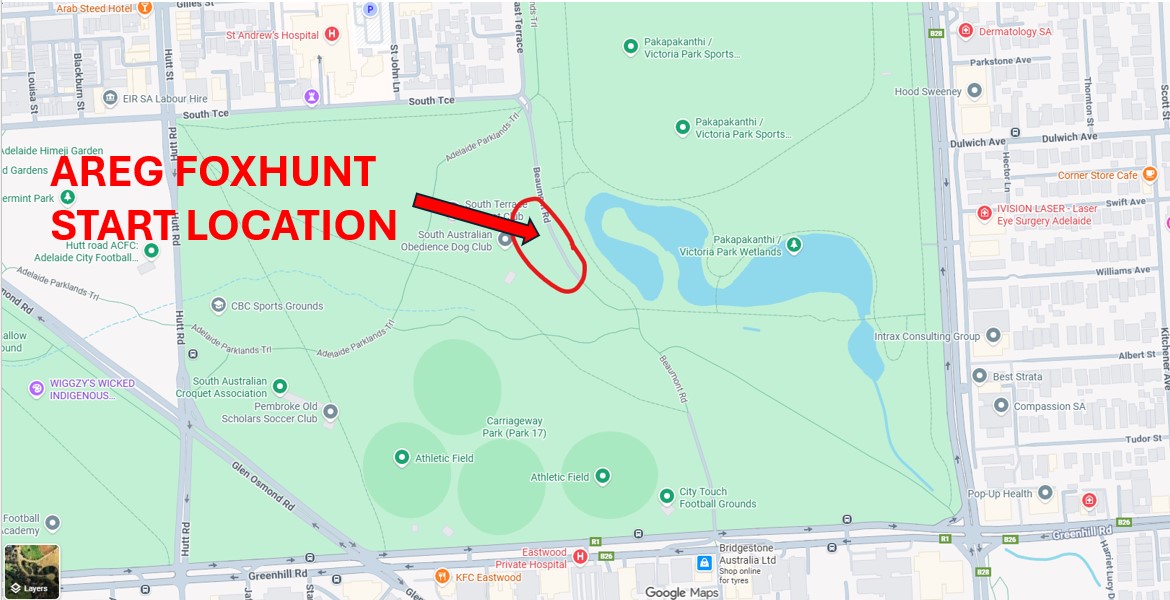
 A reminder that the next foxhunt run by the Amateur Radio Experimenters Group will be run at 2pm today, starting with a foot based hunt around the Victoria Park Wetlands in the south park lands in the City, off Beaumont Road via South Terrace.
A reminder that the next foxhunt run by the Amateur Radio Experimenters Group will be run at 2pm today, starting with a foot based hunt around the Victoria Park Wetlands in the south park lands in the City, off Beaumont Road via South Terrace.