Update Friday 4th July: REPEATER LAUNCH DELAYED TO SUNDAY 13TH JULY.
While launch-site wind and rain forecasts have significantly improved over the last few days, the flight path prediction is still very marginal, and does not allow us to reach as high an altitude as possible – the main aim of this flight. As such, the full-scale launch will be delayed to next weekend, on Sunday the 13th of July.
Hopefully we get better conditions next weekend!
Update Sunday 6th July:
Thanks to everyone that tuned in to the mini-launch on Sunday the 6th! Unfortunately the tracking payload appears to have had an insulation failure and failed to to very low temperatures at around 17km altitude. We’re fairly confident we know the cause, and this will be remediated for next flight.
AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 13th of July, with a planned launch time of 10 AM ACST. If we have to scrub due to poor weather, the backup launch date will be the 13th of July.
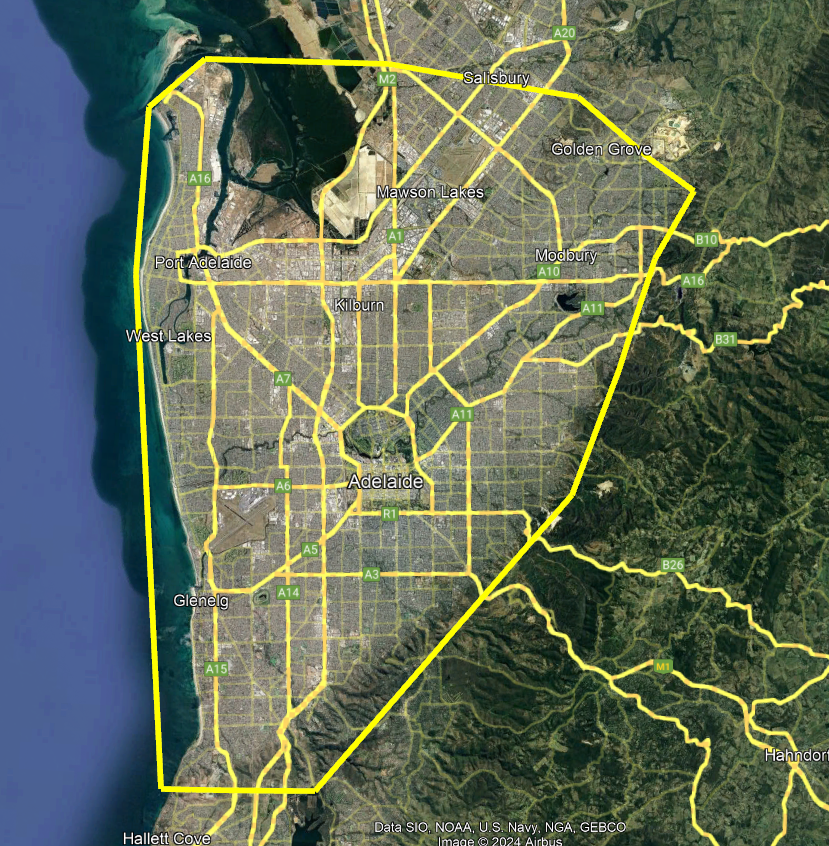
This will be a re-flight of the Horus 63 payloads, which will include our cross-band repeater payload and Wenet imagery payload. This time we hope to achieve a burst altitude of >35km, which will enable repeater coverage between Adelaide and Melbourne! We are looking for stations in Victoria and South-West NSW to listen out for balloon telemetry, and give us a call on the repeater!
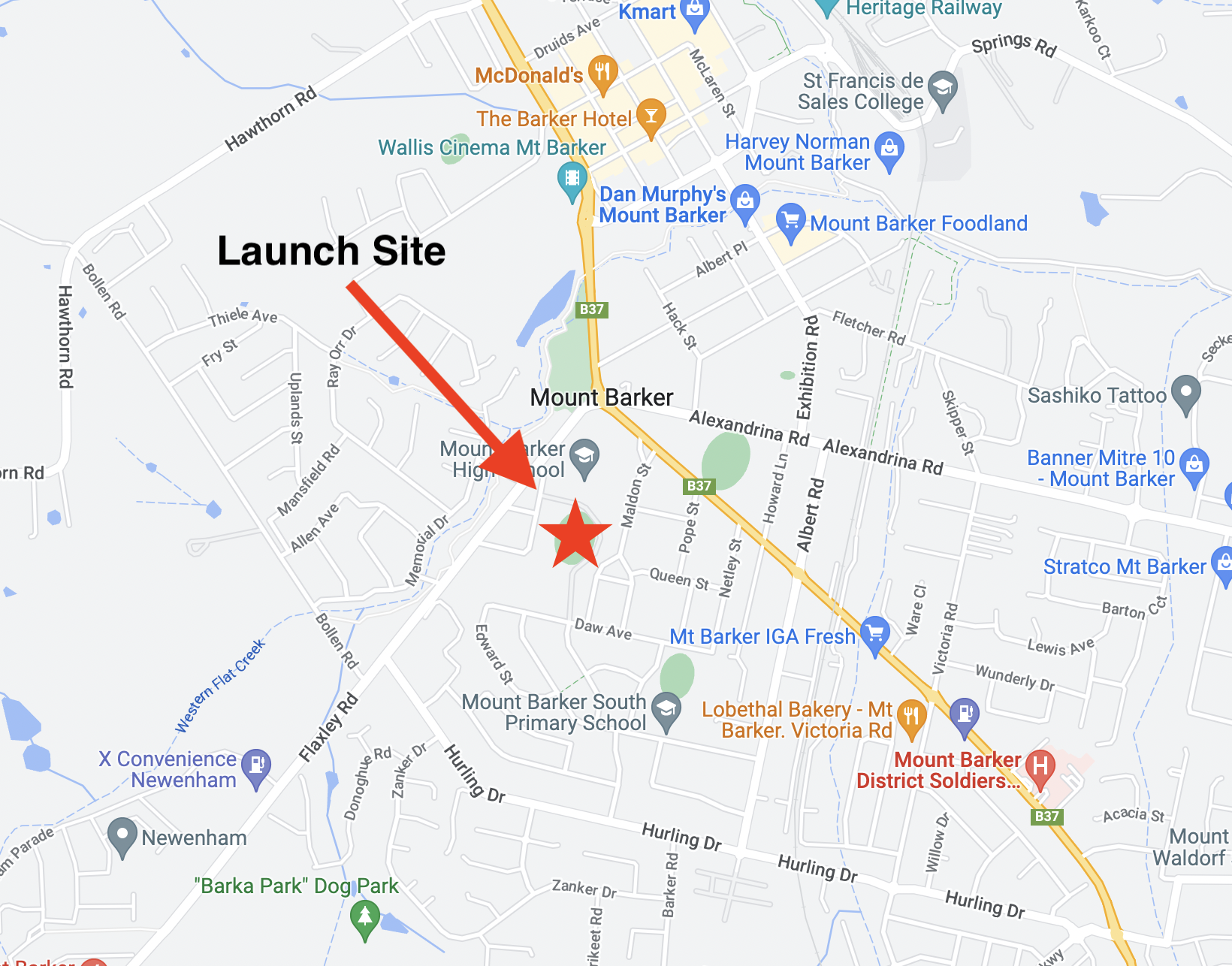
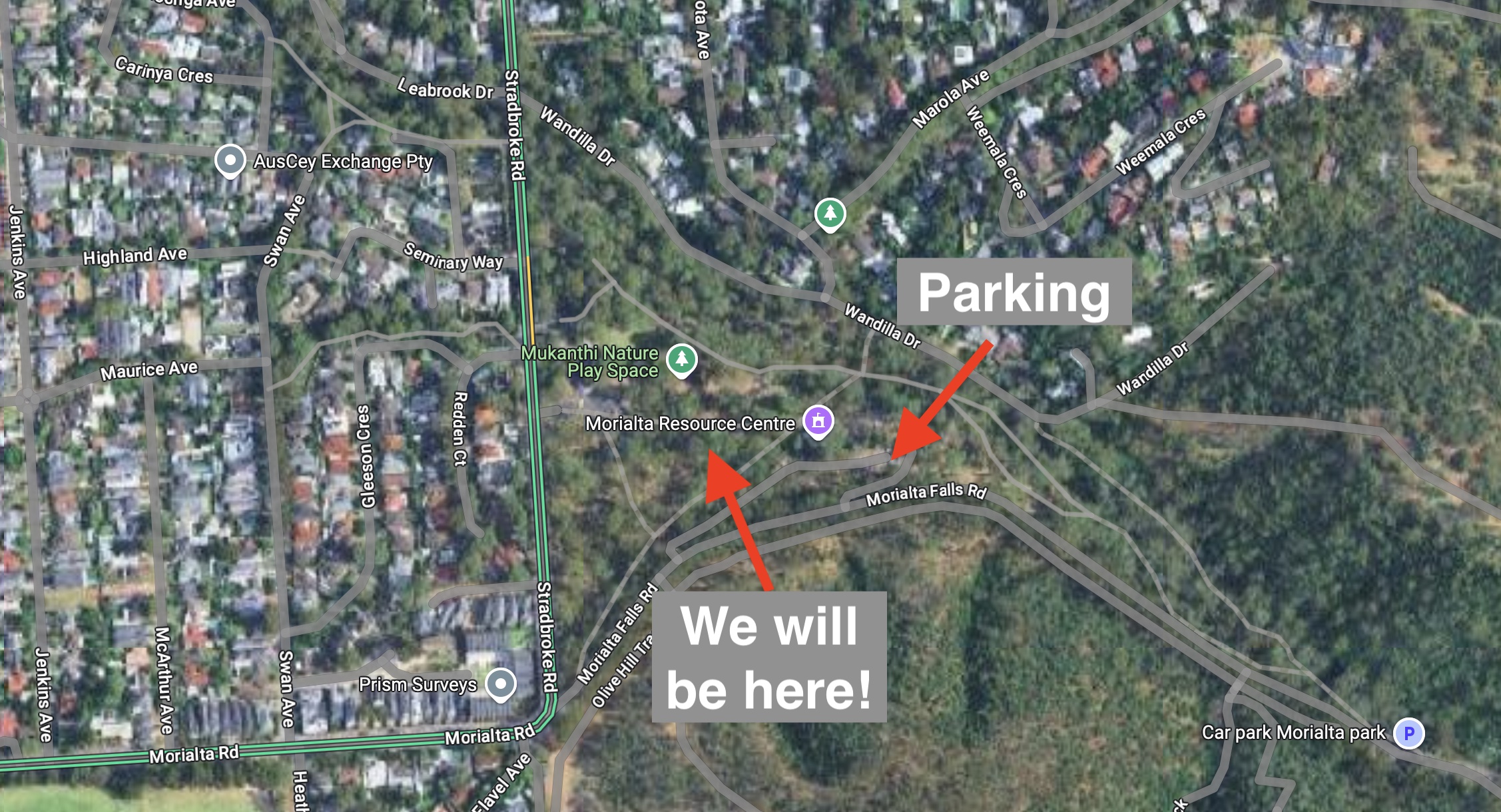
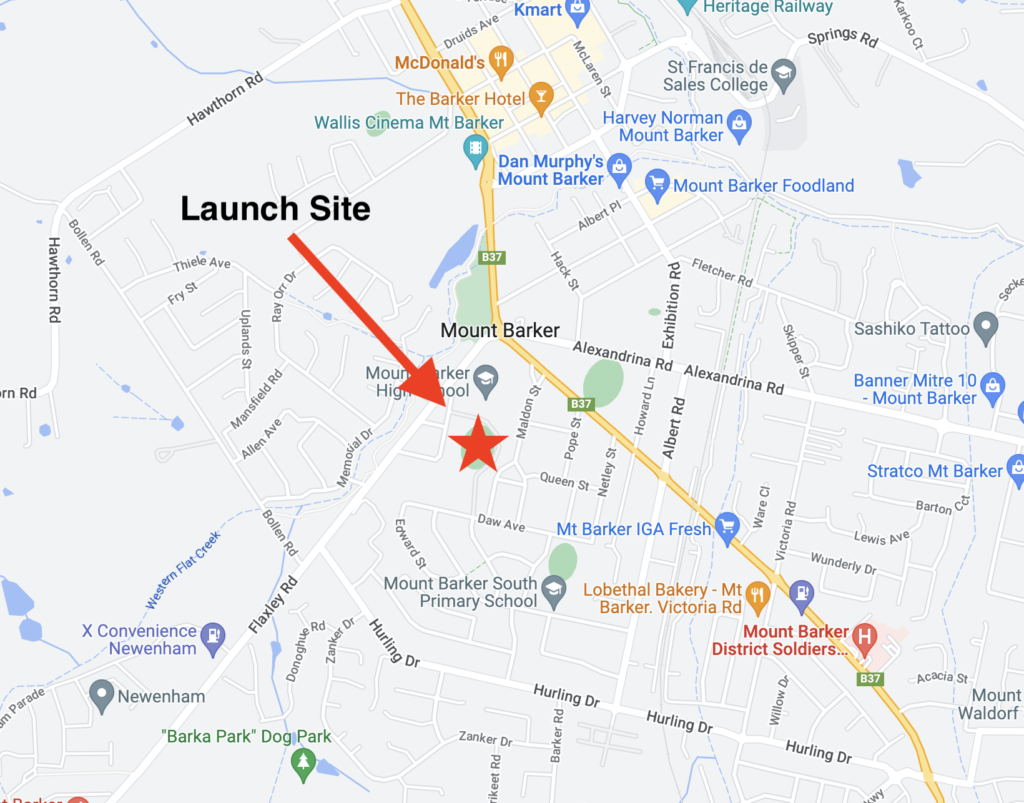
This launch is currently planned to be performed from the Mt Barker High School Oval with the launch team arriving on site from around 9:15 AM. Note that access to the oval is via Stephenson street, and parking near the oval is extremely limited.
TRACKING LINKS

Details of the frequencies in use on this flight are:
- FM Crossband Repeater: 145.075 MHz Input (91.5 Hz CTCSS), 438.975 MHz output.
- Wenet Imagery on 443.5 MHz. (Now receivable using a web browser! See below!)
- Primary Horus Binary telemetry on 434.200 MHz
- Backup Horus Binary payload, on 434.210 MHz
On this flight we encourage new listeners to try out our new web-browser-based decoding software for Horus Binary and Wenet – find out more about this further below!
During the flight, all the payloads can be tracked lived on the SondeHub-Amateur tracker here!
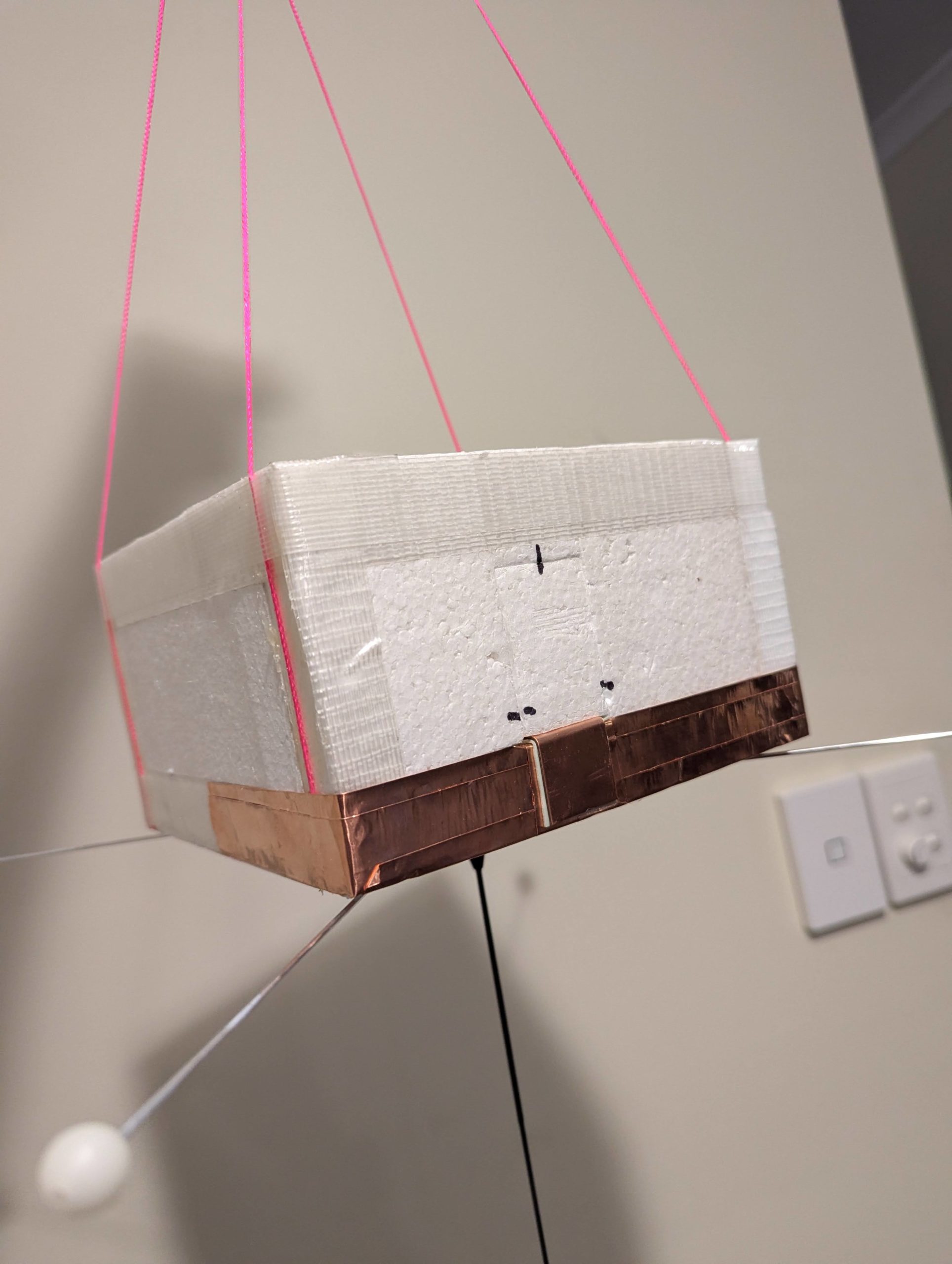
FM Cross-band Repeater Payload

This will be a re-flight of our cross band voice repeater, which performed very well on Horus 63. This is based around a Yaesu FT-530 handheld transceiver. The balloon repeater should be heard on:
- INPUT: 145.075MHz with 91.5Hz CTCSS
- OUTPUT: 438.975MHz – 0.5W into 1/2-wave omni
Please note that this repeater is experimental, and may have performance issues or even fail completely during the flight!
To transmit to the balloon at the maximum range of 800km (once the balloon reaches 100,000ft ++) you should only need approximately 10-20W and an 2-4dB gain antenna.
Receiving the balloon at 400km range in a handheld environment should be achievable, but to hear the repeater at the maximum range of 800km you should expect to need a 10dB gain Yagi for a 0.4uV capable receiver and 2dB feeder loss
This setup is much the same as the LEO satellites but without the doppler shift.
PLEASE MAKE SURE YOU CAN HEAR IT BEFORE YOU TRANSMIT!
This repeater will be operated as a controlled net, with the net control callsign VK5ARG – please listen out for net control before calling!
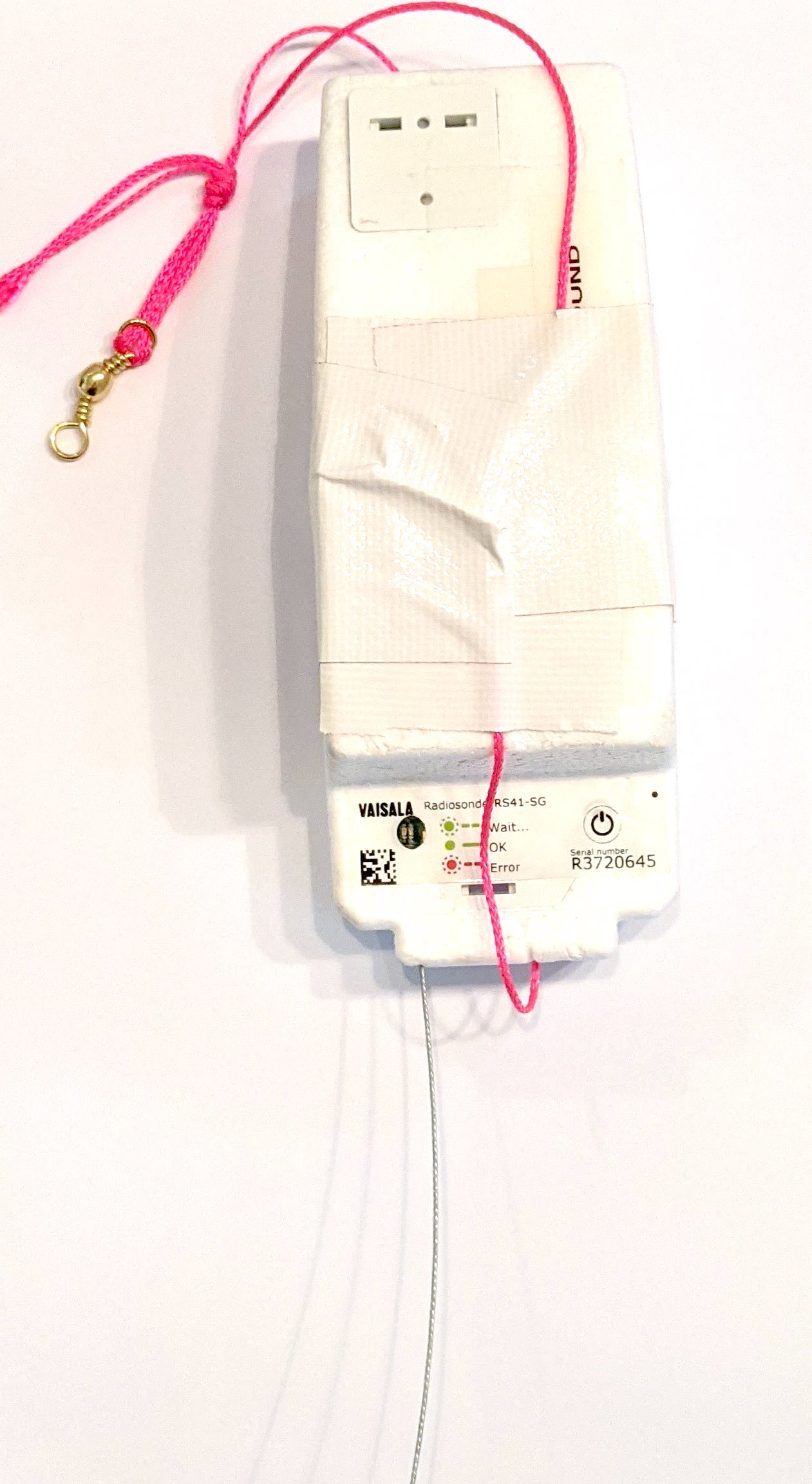
Primary Telemetry – Horus Binary 434.200 MHz – HORUS-V2
 The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
The primary tracking telemetry will be transmitted on 434.200 MHz using the Horus Binary 4FSK data mode. Amateurs in the Adelaide and Central SA region are also encouraged to get involved with the flight through receiving and uploading flight telemetry from our 70cm band tracking beacons. Every piece of telemetry data is valuable to the flight tracking and recovery teams so if you can help join the distributed receiver network to collect that data you will be making an important contribution to the project!
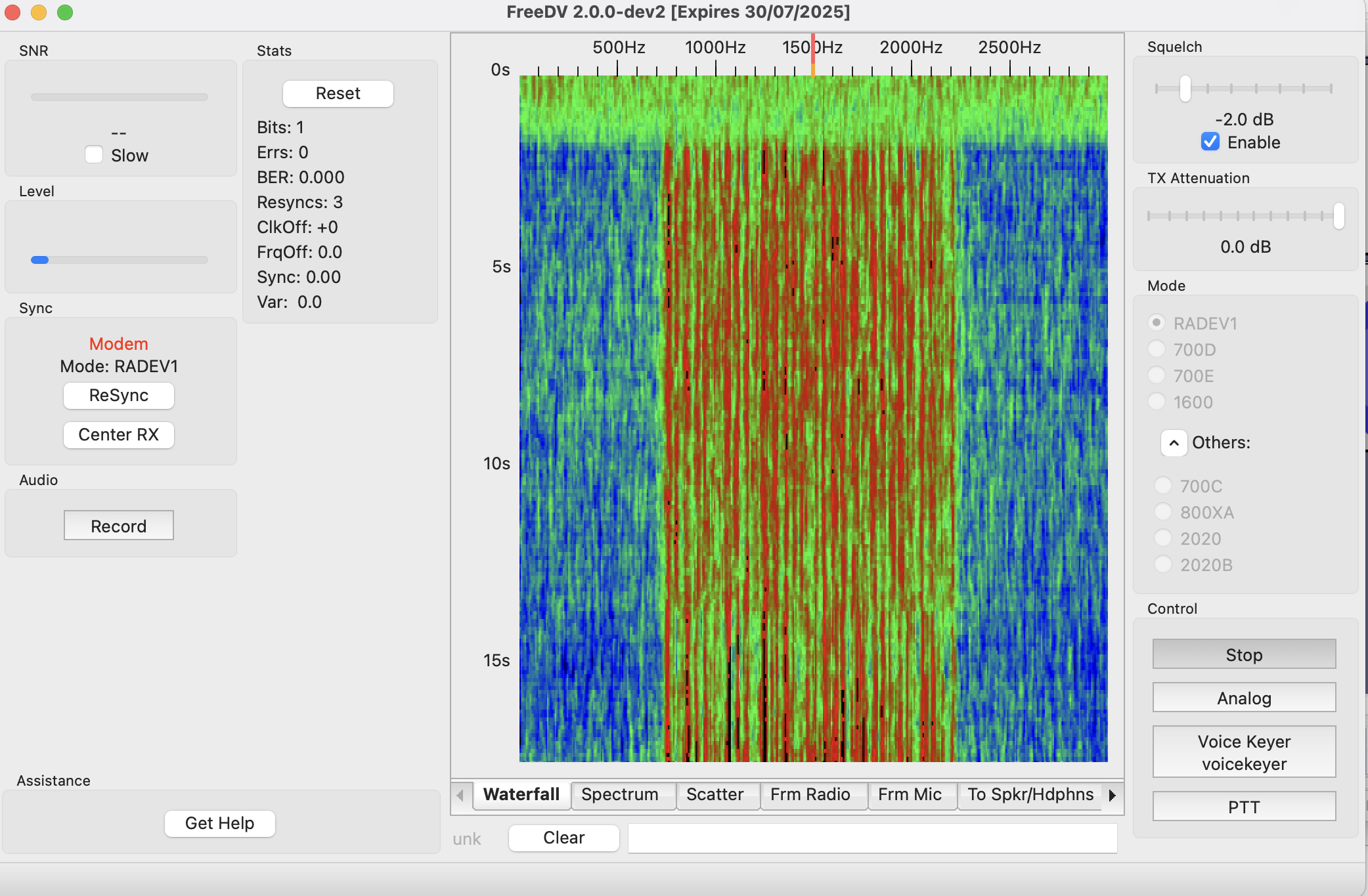
If you try receiving the telemetry from this flight, you’ll need a SSB-capable 70cm receiver (or a SDR), and the Horus-GUI telemetry decoder software. A brief guide on setting this up is available here: https://github.com/projecthorus/horusdemodlib/wiki/1.1-Horus-GUI-Reception-Guide-(Windows-Linux-OSX)
Note that you will need to use a USB ‘dial’ frequency of 434.199 MHz for the 4FSK signal to be centred in your receiver passband and hence be decodable.
Horus Binary telemetry can now also be received using your web browser, using either a SSB receiver or even a RTLSDR!
Click this link to start up a browser-based receiver:
WebHorus – 434.200 MHz
We’ve also got a guide on how to use this here: https://youtu.be/VrgqF7ly-mU
Backup Telemetry – Horus Binary 434.210 MHz – VK5ARG
A backup tracking payload will be transmitting on 434.210 MHz using the Horus Binary 4FSK data mode, and can be received in the same way as the primary tracking payload, with information above. For this payload you will need to use a USB ‘dial’ frequency of 434.209 MHz.
Click this link to start up a browser-based receiver:
WebHorus – 434.210 MHz
Wenet Imagery – 443.500 MHz
Imagery on this flight will be transmitted via the Wenet downlink system, which uses 115 kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
Wenet can now be received on almost any modern computer, and even some newer android devices, using the new WebWenet software! This operates entirely within a web browser. Information on how to get setup to use this is available here: https://www.youtube.com/watch?v=Euo4BGB6wUU
Click this link to start up a browser-based receiver:
Wenet Web Receiver – 443.5 MHz
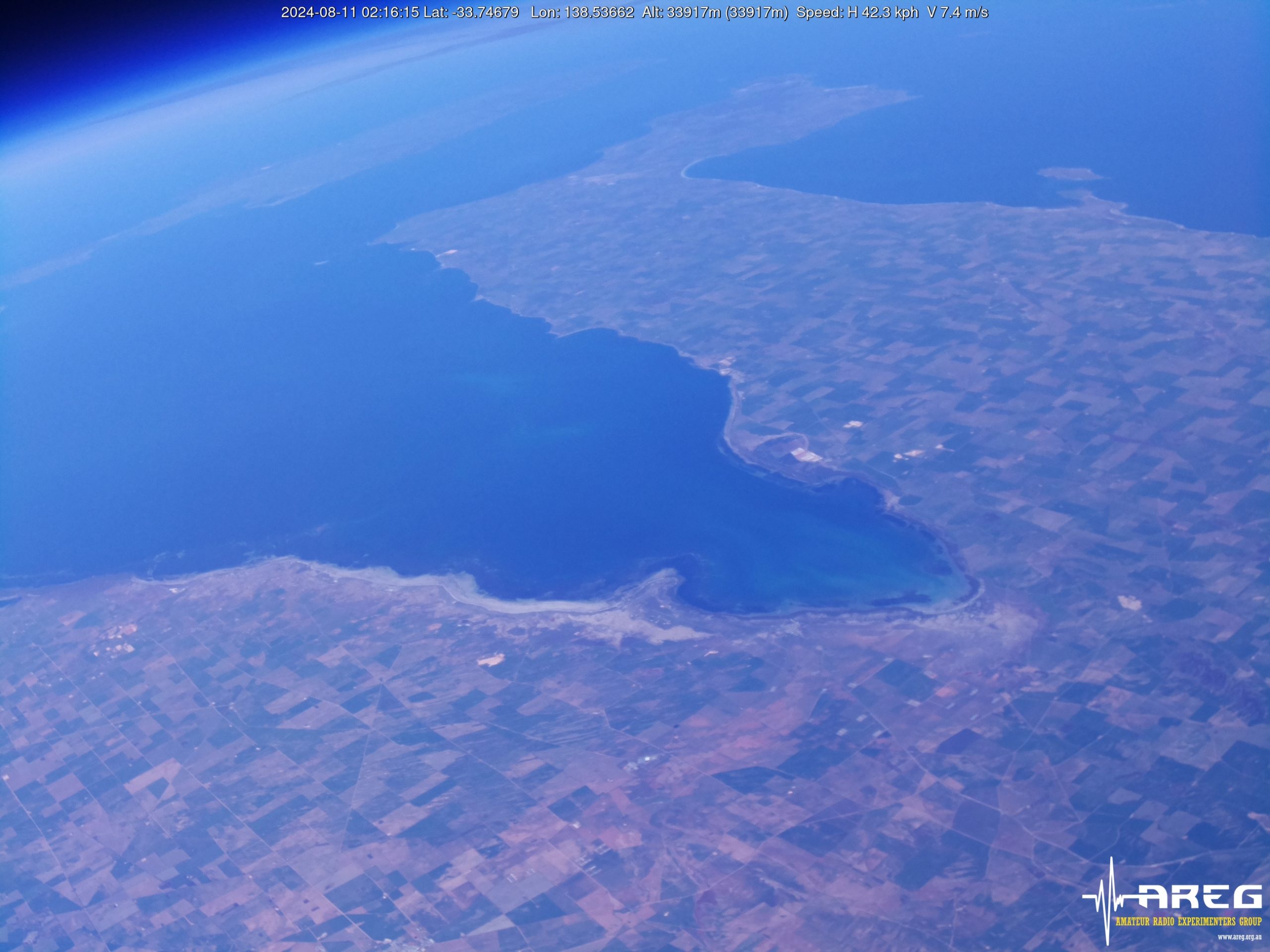
This payload will be continuing our experimentation with a PiCam v3, which we had some limited success with on Horus 63.
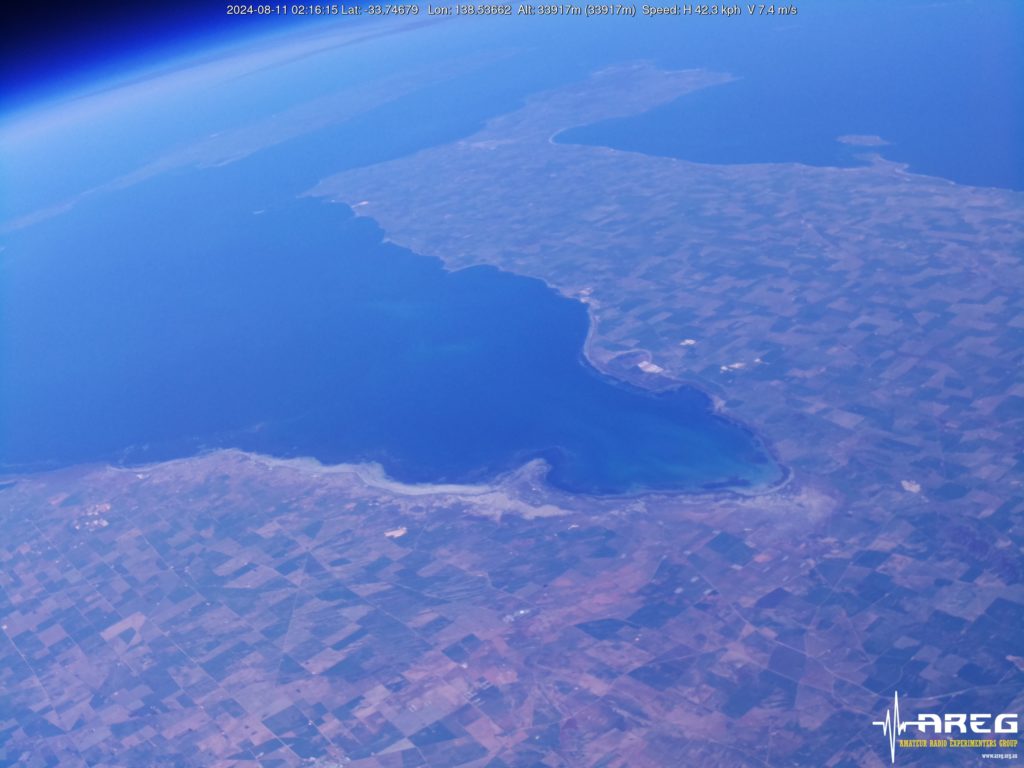
Wenet imagery from Horus 62
We encourage new listeners to try out the WebWenet software for decoding signals on this flight – however you can also still receive the signal using the Linux-based decoder, with details on this available here:
https://github.com/projecthorus/wenet/wiki/Wenet-RX-Instructions-(Linux-using-Docker)
Please note the transmit frequency of 443.5 MHz, which may require listeners to re-configure their Wenet setup.
During the flight, the live imagery will be available at this link: http://ssdv.habhub.org/