
Horus 66 was launched to test out some payloads for the upcoming Fleet Space LaunchBox STEM event (November 2nd), and to help chase teams test out their equipment. Unlike our Horus 65 attempt, the weather was excellent this time around, and no balloons were lost!
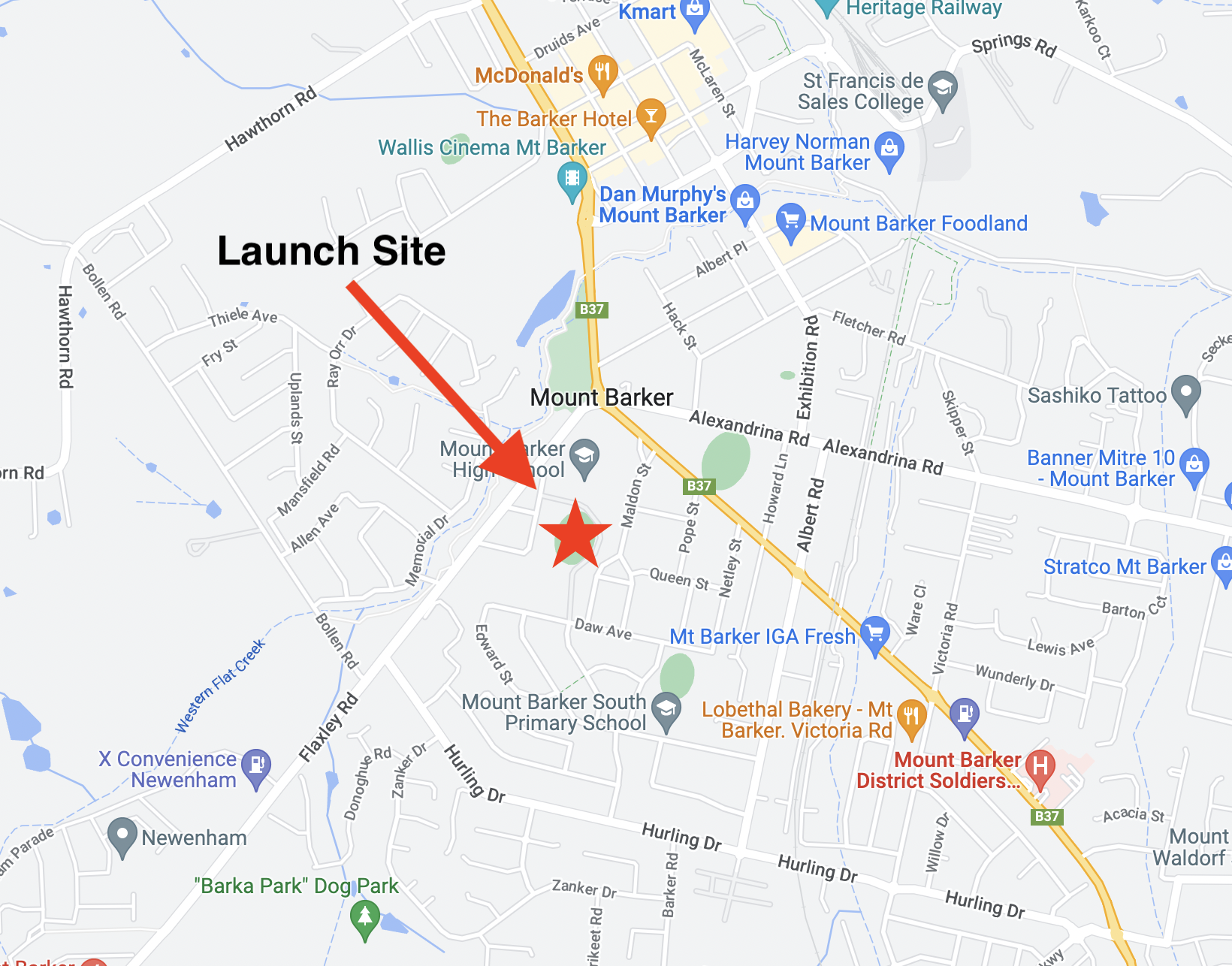
The launch was performed from the Mt Barker Summit Sport & Recreation Park, which is where the LaunchBox STEM event will be hosted. This gave us a chance to test out the site and see how well we could receive telemetry and imagery.
Also on this launch was a RASCube-LB payload from Robinson Aerospace, with the aim to validate the radio link (on the 915 MHz LIPD band) on a real launch. These payloads have been used in the LaunchBox program, and 2 of these will be launched at the event.
Setup & Launch
We had a good number of attendees at the launch site, including Laura from Fleet Space, and Simon from Robinson Aerospace. Peter VK5KX had his automatic tracking ground-station, on which we added a 915 MHz Yagi to support reception of the RASCube-LB payload. Matt VK5ZM brought his portable ground station, and we also had a few chase cars along to test out their systems.

Launch preparations went smoothly, with only light winds at the site. The launch was performed right on time at 10:30AM, with the balloon visible for about 10 minutes, before it ascended through clouds.



Flight & Recovery
The flight progressed as expected from our predictions, heading swiftly to the north-east, before slowing and turning to the west as it rose up to a maximum altitude of 35100m before balloon burst.

Horus 66 Flight Path
The landing was in mallee scrub approximately 10km north-east of Overland Corner, in the Riverland. Peter VK5PE, Bruce VK5MRB and Ivan VK5HS were able to access the landing area and recover the payloads for us – thanks guys!!

Bruce VK5MRB (left) and Peter VK5PE (right) at the landing site.
Wenet Imagery
For this launch we flew a PiCamera v2, to ensure we didn’t hit the focus problems encountered with the PiCam v3 on the last few imagery attempts. We ended up with excellent imagery throughout the flight, though we did hit some haze and colour balance issues at times.













The full set of images from the flight can be viewed (though in reverse time order!) here: https://ssdv.habhub.org/VK5ARG/2025-10-18
The small number of Wenet receivers for this flight did an amazing job, with almost 100% image reception from launch through to landing. The following stations contributed imagery data:
VK5ZM: 85705 packets (20.92 MB)
VK5HS/p: 115982 packets (28.32 MB) (Running WebWenet)
VK5APR: 17450 packets (4.26 MB) (Using WebWenet on their mobile phone at the launch site!)
VK5QI-9: 137530 packets (33.58 MB)
VK5KX-9: 301637 packets (73.64 MB)
VK5IS: 214118 packets (52.27 MB)
VK5HS: 176737 packets (43.15 MB)
A dashboard showing telemetry from the Wenet payload is available here.
Horus Binary Tracking
As usual, we had a good roundup of receivers from all around South Australia tracking the Horus Binary payload. The following callsigns were seen to submit telemetry:
BARC-RRR, VK5AH,V K5ALG, VK5ALG-9, VK5APR, VK5BRL, VK5CBM, VK5COL, VK5DEN, VK5GA, VK5HS, VK5HW, VK5IS, VK5KX-9, VK5KX-i5, VK5LN, VK5NEX, VK5PE, VK5QI-9, VK5ST-4, VK5WE, VK5ZAP, VK5ZAR, VK5ZM, VK5TRM, VK5ZMD
A dashboard showing telemetry from this flight, including per-receiver reception statistics is available here.
The longest distance reception was by Michael VK5LN, at a range of 426km. At the launch site, Peter VK5KX’s tracking system was able to continue receiving the payload as it descended behind hills, likely through some combination of knife-edge refraction and tropospheric ducting. The last packet received from the launch site was at 178km range, 2300m altitude, and a reported elevation from the launch site of -0.1 degrees (with 4 degree elevation hills in the way!).



Up Next – LaunchBox – Sunday 2nd November
Our next launch will be as part of Fleet Space’s LaunchBox program, occurring on Sunday the 2nd of November. This launch is primarily an event for the student participating in the LaunchBox program, so at this stage we don’t expect the site will be open to the general public around the launch time, though it should be open later in the day.
You can still get involved by receiving telemetry and imagery from the flight, and tracking the launch online. In particular we are looking for more Wenet imagery receivers, as these live images provide great engagement for the students!
More details on tracking this flight will be posted on the AREG website within the next week.





















{kind=link}